基于腿轮自平衡技术的救援巡逻小车
2023-02-28 16:35魏塽孙明跃赵宇航罗树梅闫庚龙
现代信息科技 2023年20期
关键词:控制算法
魏塽 孙明跃 赵宇航 罗树梅 闫庚龙

摘 要:文章介绍一种基于腿轮自平衡技术的救援巡逻小车的设计,该小车采用两个可伸缩的腿轮实现自平衡和地形适应,配备多种传感器(如激光雷达、摄像头、超声波传感器和热能生命探测仪),用于环境感知和目标识别。控制系统采用分层控制结构,包括运动控制、导航控制和任务控制等模块,通过Dijkstra算法进行路径规划。该小车可以在不同地形和复杂环境中实现自主巡逻和救援任务,具有较高的实用性和应用推广价值。
关键词:腿轮自平衡;救援巡逻;自主巡逻;控制算法
中图分类号:TP273;TP242 文献标识码:A 文章编号:2096-4706(2023)20-0151-06
Rescue Patrol Car Based on Leg Wheel Self-balancing Technology
WEI Shuang, SUN Mingyue, ZHAO Yuhang, LUO Shumei, YAN Genglong
(Department of Brewing Engineering Automation, Moutai Institute, Zunyi 564500, China)
Abstract: This paper introduces the design of a rescue patrol car based on leg wheel self-balancing technology. The car uses two retractable leg wheels to achieve self balancing and terrain adaptation, and is equipped with various sensors (such as Lidar, cameras, ultrasonic sensors, and thermal life detectors) for environmental perception and target recognition. The control system adopts a hierarchical control structure, including modules such as motion control, navigation control, and task control, and uses Dijkstra algorithm for path planning. This car can achieve autonomous patrol and rescue tasks in different terrains and complex environments, and has high practicality and application promotion value.
Keywords: leg wheel self-balancing; rescue patrol; autonomous patrol; control algorithm
0 引 言
随着人工智能技术和自动化技术的不断发展,自主移动机器人的研究和应用越来越广泛。救援巡逻小车作为一种自主移动机器人,具有广泛的应用前景。特别是在一些灾难现场和危险区域中,人员难以进入的场所,救援巡逻小车可以扮演着至关重要的角色。基于腿轮自平衡技术的救援巡逻小车因其优越的通过性能和稳定性在近年来得到了广泛的关注和研究。本文旨在设计一种基于腿轮自平衡技术的救援巡逻小车,通过搭载多种传感器实现环境感知和自主导航,为救援行动提供支持和保障。
当今自然灾害和人为灾害频繁发生,灾后救援成为必要的任务。现有智能救援产品主要分为手持仪器、轮动式小型装备、大型装备、飞行设备或地貌勘测设备和一些特殊设备。这些设备的功能包括生命痕迹探索、医疗运输和灾区解剖、勘测地形、测距与图像感知、检测二氧化碳浓度、探测呼吸与体温等。如图1所示,每种设备均有其优点和不足,需要根据具体应用场景进行选择和搭配[1]。
随着人工智能、机器人技术的不断发展,自主移动机器人的应用范围不断拓展,救援和巡逻作为自移动机器人的应用领域之一,需要机器人具有较强的自主探索和搜救能力,涉及多个学科领域,如机械设计、电子工程、计算机科学和控制工程等使其能够在复杂环境中自主行动,为人类提供有效的支持和帮助。因此,基于腿轮自平衡技术的救援巡逻小车研究具有重要的应用价值和研究意义,相较于传统的三轮和四轮轮式运动机器人,两轮机器人作为救援巡逻小车具有更多的优势[2]。
传统的移动机器人通常采用轮式或者履带式结构,但是这些结构在不平坦的地面上容易出现倾翻等安全问题。而基于腿轮自平衡技术的移动机器人可以通过动态控制机构的姿态来实现自主平衡,从而具有更好的适应性和安全性。該技术结合了腿式机器人和轮式机器人的优点,能够克服传统机器人在复杂地形上的行进困难。应对垂直障碍的跳跃动作规划方法,并基于全身力矩控制框架进行控制与实现[3]。
1 救援巡逻小车设计
1.1 巡逻小车整体设计
1.1.1 整车架构设计
整车机械设计如图2所示,轮组部分采用腿轮结构,腿部由两条可以伸缩的机械臂组成,可以在不平整的地面行驶。车身由底盘、电机、电池和控制系统组成。底盘上安装了两个驱动轮和一个自平衡机构,用于保持车身平衡。
1.1.2 硬件系统设计
小车的电气控制系统包括传感器、执行器和控制器。传感器用于获取车身姿态、速度、位置等信息;执行器用于驱动电机和腿部机械臂;控制器则根据传感器获取的信息和用户输入的指令,计算出控制信号,控制小车的运动。
1.1.3 软件系统设计
小车的软件系统包括运动控制、路径规划、目标识别等模块。运动控制模块根据传感器数据计算出小车的姿态和速度控制信号。路径规划模块根据地图信息和目标位置,采用Dijkstra算法路径规划算法,生成最优路径。目标识别模块通过图像处理和计算机视觉技术,对目标进行识别和定位,为路径规划和运动控制提供目标位置信息。
1.2 传感器选型
救援巡逻小车常用的传感器包括GPS和IMU、红外传感器、超声波传感器、气象传感器、麦克风。这些传感器可以感知周围环境、获取车体位置、速度、姿态等信息,用于实现自主导航、障碍物检测、运动控制等任务。不同传感器各有优缺点,需要根据具体需求进行选型。
GPS和IMU:用于位置和定位。GPS可以提供小车的位置信息,而IMU则可以获取小车的加速度、角速度等信息,从而实现精准的定位和导航。GPS和IMU的联合使用可以为救援巡逻小车提供精准的定位和导航控制,同时具有较强的抗干扰能力并能实时反馈[4]。
红外传感器:用于热源探测,其具有非接触式测量、高精度测量、夜間工作能力强、抗干扰能力强等优点,可以为小车提供有效的目标定位和判断支持以便快速定位被困人员的位置。
超声波传感器:用于障碍物检测。如图3所示,超声波传感器可以测量前方障碍物的方向、距离、形状和尺寸等信息,避免小车发生碰撞和损坏。
气象传感器:用于检测环境的气象状况,救援巡逻小车中运用气象传感器可以提供必要的气象数据支持,帮助判断环境安全性,改善控制精度,提高任务效率。
麦克风:用于声音感知。麦克风可以接收周围环境的声音信号,从而帮助小车识别声源,如人声、警报声等。
集成化摄像头如图4所示,发现异常情况及时进行处理和报警,提高安全性和效率,集成了摄像头的救援巡逻小车可以通过图像识别算法对周围环境进行分析,提高救援效率和安全性。
1.3 控制系统设计
对于自平衡控制,采用LQR控制器,以实现车体的稳定直立运动。LQR控制器是通过最小化控制代价函数来计算控制信号。腿轮带关节自平衡小车的LQR控制模型,我们需要定义状态矢量和控制输入向量。假设状态矢量x包括小车的俯仰角度、平衡点位置、俯仰角速度和平衡点位置速度,控制输入向量u包括腿部的张力和关节角速度。
对于导航控制,需要设计轨迹规划算法和控制策略,以实现车体在给定的路径上行驶。其中轨迹规划算法采用Dijkstra算法,以找到最优路径,以下是Dijkstra算法的具体计算过程:
1)创建一个包含所有节点的集合,将起始节点标记为距离为0的起点,将其余节点的距离标记为无限远。
2)对于每个未访问过的节点,计算它们到起点的距离,选择距离最小的节点作为下一个要访问的节点。
3)对于当前节点,计算它到相邻节点的距离,如果这个距离小于已知的最短路径,则更新它的距离。
4)将当前节点标记为已访问。
5)重复步骤2)~4),直到所有节点都被访问过或者没有可达节点。
6)找到从起点到终点的最短路径。
如图5所示,采用dijkstra算法分析从源点A到目标点F的最短路径。
在实际应用中,Dijkstra算法可以通过堆优化来实现更高效的计算,Dijkstra算法的流程图如图6所示。
2 腿轮自平衡控制
2.1 腿轮自平衡原理介绍
腿轮自平衡机器人的原理是,在机器人移动时,将机器人的控制系统中的重心定位在车轮和腿部之间,并通过调整腿部的长度和角度来改变机器人的重心位置,以维持机器人的平衡状态。此外,通过利用加速度计和陀螺仪等传感器,可以实时监测机器人的倾斜角度和加速度,以及地面的状态和机器人的速度等参数,并根据这些数据实现机器人的自适应控制和自动导航。
2.2 车体动力学建模
基于腿轮自平衡技术的救援巡逻小车能够进行自主运动和巡逻。为了对该车辆进行控制和设计控制器,我们需要对其进行动力学建模。
首先,我们定义车辆的状态向量为x = [x1,x2,x3]T,其中:x1为车身的倾角,x2为车辆的横向速度,x3为车辆的转向角度。
车辆的运动可以通过转向角度、转向速度和车身倾角来描述。接下来,我们可以根据物理学原理来建立车辆的动力学方程。
车辆的动力学方程可以表示为:
其中,fi(x)为一些非线性函数,u为一个输入向量,它控制车辆的转向速度和加速度。
具体而言,各个函数的形式如下:
f1(x):车身的倾角随时间的变化率。它可以为:
其中,l为车轮轴距。
f2(x):表示车辆的横向速度随时间的变化率。它可以为:
其中,g为重力加速度,R为车轮的半径。
f3(x):车辆的转向角度随时间的变化率。它可以为:
f4(x):车辆的横向加速度随时间的变化率。它可以为:
其中,m为车辆的质量。
f5(x):车辆的转向加速度随时间的变化率。它可以为:
其中,I为车辆的转动惯量,综上所述,这个动力学模型可以用来描述基于腿轮自平衡技术的救援巡逻小车的运动。通过控制输入向量u,即转向速度和加速度,可以控制车辆的运动状态。这个模型可以用于设计和优化车辆控制算法,以提高车辆的稳定性、速度和机动性能,进而提高车辆在救援和巡逻等场景中的应用效果。
2.3 PID控制器实现转向控制
在车辆行驶过程中,需要控制小车的转向来实现路径规划中的转弯。采用PID控制器可以实现小车转向控制的自动化。其中,误差定义为实际转向角度与目标转向角度之间的差值,即:
其中,θtarget为目标转向角度,θactual为当前实际转向角度。根据PID控制器的公式,控制器输出为:
其中,Kp、Ki、Kd分别为比例系数、积分系数、微分系数,可根据实验数据进行调整。控制器输出的结果即为小车的转向角度。
3 救援功能设计
3.1 救援任务需求分析
3.1.1 实时通信
小车将配备通信设备,如无线电、卫星通信等,以确保与远程控制中心或其他救援人员之间的实时通信。这样,小车可以随时向指挥中心报告救援任务的进展和遇到的困难,从而快速响应和适应各种救援场景。此外,小车还可以接收指挥中心的指令和任务,及时调整自身的行动和路径,提高救援效率和成功率。通过这些通信设备,小车与其他救援力量之间可以实现协同作战,最大限度地发挥各方的力量,为救援行动保驾护航。
3.1.2 环境适应性
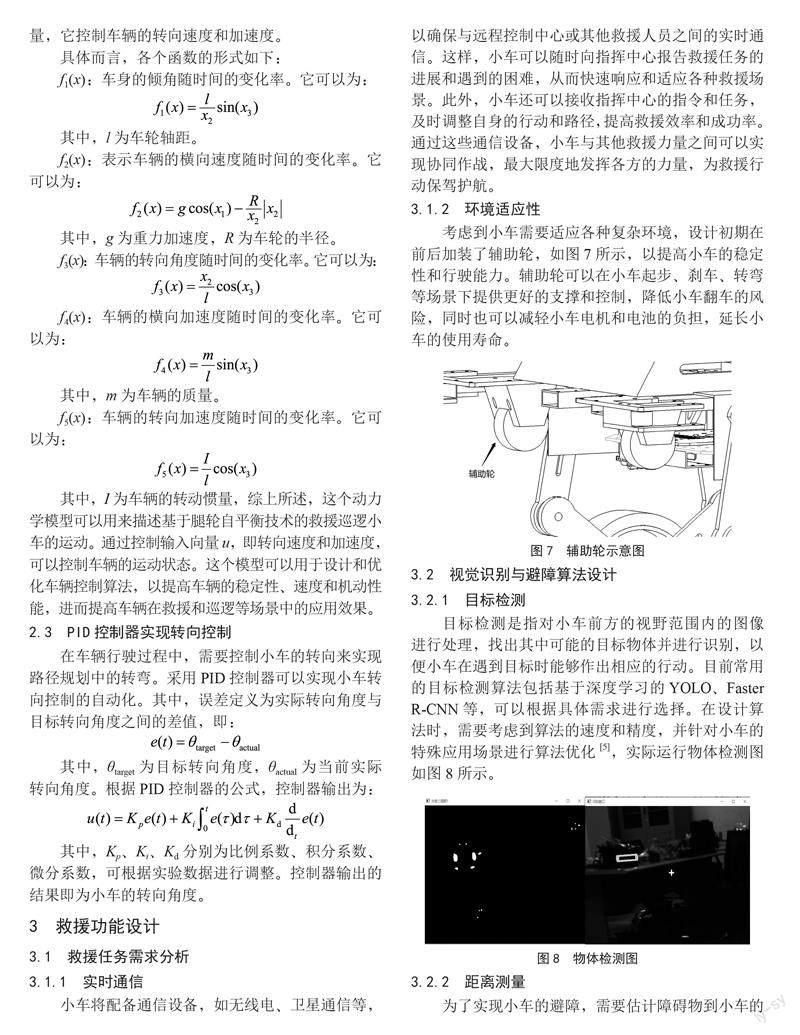
考虑到小车需要适应各种复杂环境,设计初期在前后加装了辅助轮,如图7所示,以提高小车的稳定性和行驶能力。辅助轮可以在小车起步、刹车、转弯等场景下提供更好的支撑和控制,降低小车翻车的风险,同时也可以减轻小车电机和电池的负担,延长小车的使用寿命。
3.2 视觉识别与避障算法设计
3.2.1 目标检测
目标检测是指对小车前方的视野范围内的图像进行处理,找出其中可能的目標物体并进行识别,以便小车在遇到目标时能够作出相应的行动。目前常用的目标检测算法包括基于深度学习的YOLO、Faster R-CNN等,可以根据具体需求进行选择。在设计算法时,需要考虑到算法的速度和精度,并针对小车的特殊应用场景进行算法优化[5],实际运行物体检测图如图8所示。
3.2.2 距离测量
为了实现小车的避障,需要估计障碍物到小车的距离。常用的方法包括使用深度相机进行测距,或者利用单目视觉技术计算目标物体的距离。具体的算法可以根据实际需求进行选择,同时需要考虑算法的精度和实时性。
3.2.3 避障决策
在获得障碍物位置和距离信息后,需要采用避障算法进行决策。常用的避障算法包括基于障碍物的躲避算法和路径规划算法等。基于障碍物的躲避算法主要是在检测到障碍物后,计算小车的运动方向和速度,使其避开障碍物。路径规划算法则是在小车的整个运动轨迹上进行规划,以保证小车能够绕过所有障碍物。需要根据实际应用场景进行算法选择,并考虑算法的实时性和精度[6]。
3.2.4 控制策略
在进行避障决策后,需要采用相应的控制策略来实现小车的运动控制。通常可以通过调节小车的速度和转向角度来控制其运动。在设计控制策略时,需要考虑小车的平衡控制和运动控制,以确保小车的稳定和安全。同时,需要考虑算法的实时性和精度,以满足实际应用的要求。
3.2.5 SLAM建图
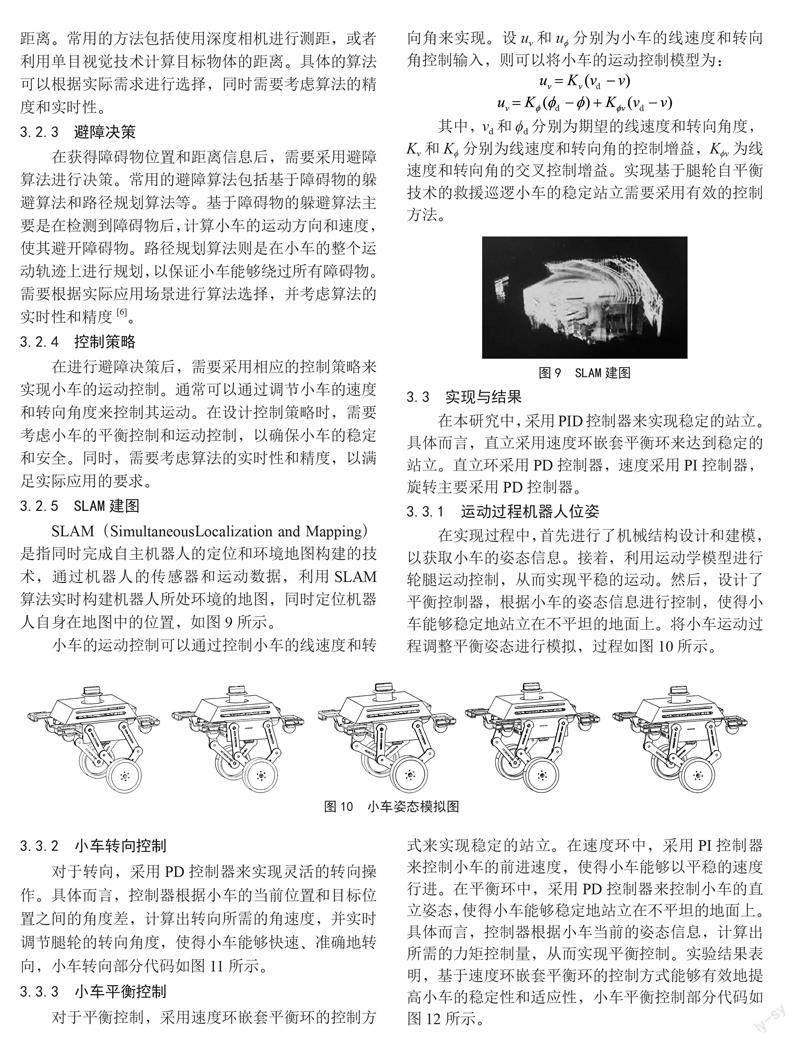
SLAM(SimultaneousLocalization and Mapping)是指同时完成自主机器人的定位和环境地图构建的技术,通过机器人的传感器和运动数据,利用SLAM算法实时构建机器人所处环境的地图,同时定位机器人自身在地图中的位置,如图9所示。
小车的运动控制可以通过控制小车的线速度和转向角来实现。设uv和u?分别为小车的线速度和转向角控制输入,则可以将小车的运动控制模型为:
其中,vd和?d分别为期望的线速度和转向角度,Kv和K?分别为线速度和转向角的控制增益,K?v为线速度和转向角的交叉控制增益。实现基于腿轮自平衡技术的救援巡逻小车的稳定站立需要采用有效的控制方法。
3.3 实现与结果
在本研究中,采用PID控制器来实现稳定的站立。具体而言,直立采用速度环嵌套平衡环来达到稳定的站立。直立环采用PD控制器,速度采用PI控制器,旋转主要采用PD控制器。
3.3.1 运动过程机器人位姿
在实现过程中,首先进行了机械结构设计和建模,以获取小车的姿态信息。接着,利用运动学模型进行轮腿运动控制,从而实现平稳的运动。然后,设计了平衡控制器,根据小车的姿态信息进行控制,使得小车能够稳定地站立在不平坦的地面上。将小车运动过程调整平衡姿态进行模拟,过程如图10所示。
3.3.2 小车转向控制
对于转向,采用PD控制器来实现灵活的转向操作。具体而言,控制器根据小车的当前位置和目标位置之间的角度差,计算出转向所需的角速度,并实时调节腿轮的转向角度,使得小车能够快速、准确地转向,小车转向部分代码如图11所示。
3.3.3 小车平衡控制
对于平衡控制,采用速度环嵌套平衡环的控制方式来实现稳定的站立。在速度环中,采用PI控制器来控制小车的前进速度,使得小车能够以平稳的速度行进。在平衡环中,采用PD控制器来控制小车的直立姿态,使得小车能够稳定地站立在不平坦的地面上。具体而言,控制器根据小车当前的姿态信息,计算出所需的力矩控制量,从而实现平衡控制。实验结果表明,基于速度环嵌套平衡环的控制方式能够有效地提高小车的稳定性和适应性,小车平衡控制部分代码如图12所示。
4 结 论
随着科技的不断发展,基于腿轮自平衡技术的救援巡逻小车已成为智能机器人领域的研究热点之一。虽然目前已有广泛应用,但仍需解决提高运动和安全性能、探索和优化控制算法等问题。
未来的研究方向应包括探索和优化控制算法、开发更加智能的系统以及继续探索和开发新的应用场景。例如,可以进一步研究机器人的自主导航和路径规划算法,提高机器人的自主决策和行动能力;在系统智能方面,可以探索更加智能的传感器和控制技术,以提高机器人的环境感知和处理能力。
总之,基于腿轮自平衡技术的救援巡逻小车在未来有着广阔的发展前景,需要不断创新和完善技术和系统设计,从而更好地服务于人类社会。
参考文献:
[1] 孟凯宁,舒畇溦,杜成群.基于废墟结构特征的灾后救援机器人设计研究 [J].包装工程,2022,43(24):180-188.
[2] 李家宸.轮腿式仿生机器人运动控制研究 [D].哈尔滨:哈尔滨工业大学,2019.
[3] 辛亚先,李贻斌,柴汇,等.基于全身力矩控制的双腿轮机器人跳跃方法研究 [J].自动化学报,2023,49(8):1635-1644.
[4] 张青春,周玲,吴峥.GPS/BDS和IMU融合技术在无人配送车定位解算中应用研究 [J].电子测量技术,2022,45(21):36-41.
[5] 化嫣然,张卓,龙赛,等.基于改进YOLO算法的遥感图像目标检测 [J].电子测量技术,2020,43(24):87-92.
[6] 张世义.果园移动机器人自主避障运动规划方法研究 [D].镇江:江苏大学,2022.
作者简介:魏塽(2001—),男,汉族,贵州黔西南人,本科在读,研究方向:机械设计。
收稿日期:2023-04-06
基金项目:国家级大学生创新创业训练计划(202214625003);贵州省教育厅青年科技人才成长项目(黔教合KY〔2020〕223);贵州省大学生创新创业训练计划(S202314625012);茅台学院“SRT计划”(mysrt〔2023〕011)
猜你喜欢
纺织科学研究(2020年1期)2020-05-21
电镀与环保(2018年2期)2018-04-19
制造技术与机床(2017年6期)2018-01-19
江西理工大学学报(2015年3期)2015-12-22
计算机工程(2015年8期)2015-07-03
电源技术(2015年9期)2015-06-05
电测与仪表(2014年14期)2014-04-04
电视技术(2014年19期)2014-03-11
单片机与嵌入式系统应用(2014年9期)2014-03-11
组合机床与自动化加工技术(2014年12期)2014-03-01