
碳纤维氢气瓶六轴缠绕装置结构设计研究
2023-02-27 12:40刘志强麻志浩袁鹏程
机械设计与制造 2023年2期
刘志强,麻志浩,袁鹏程,孟 顺
(江苏科技大学机械工程学院,江苏 镇江 212003)
1 引言
碳纤维是集众多优良性能于一身的复合材料,重量轻,强度高,并且具备耐高温,不易产生疲劳等[1]。凭借自身的这些优异性能,如今碳纤维被广泛应用于各个领域[2]。随着新能源汽车的发展,氢燃料电瓶汽车已经成为新能源汽车家族的重要成员[3]。碳纤维缠绕氢气瓶具有重量轻、结构效率高、耐腐蚀性好等特点,在国内外新能源汽车和航天领域广泛应用[4]。
碳纤维的成型方式主要有缠绕成型,铺放成型等[5],其中缠绕成型方式是最早且最广泛应用于纤维缠绕的加工成型技术。相对于其他成型设备,缠绕成型设备具有较高的生产效率和自动化程度,且缠绕成型制品具有较高的强度、刚度和设计性,这使得缠绕成型设备在国内外取得了快速的发展[6-7]。
目前,国内外工业级碳纤维缠绕机已经相当成熟,广泛使用于特定零件和专用大型零件生产等领域,但仍存在巨大的发展空间。有必要设计一种碳纤维氢气瓶六轴缠绕装置,通过增加碳纤维缠绕装置的运动轴,实现缠绕装置更多方向的运动,提高复杂零件缠绕成型的生产效率,有效增加缠绕装置的工作时间[8-10]。对其关键零部件模态分析、静力学分析及其运动仿真验证结构合理性,建立数学模型,进行轨迹规划计算,获得测地线轨迹。
2 碳纤维氢气瓶六轴缠绕装置结构设计
2.1 碳纤维氢气瓶六轴缠绕装置工作原理
针对氢气瓶的纤维缠绕成型,设计了一种碳纤维六轴缠绕装置。装置包括运动控制平台模块1、丝嘴偏转模块2、丝嘴旋转模块3 以及芯模固定旋转模块4,各个模块原理,如表1 所示。工作原理为:将碳纤维丝束安装在丝嘴旋转模块的丝嘴上,通过各个模块的协同作用,将平台移动到指定位置,将丝嘴上的碳纤维丝束连接到安装在芯模的氢气瓶上,控制各个模块移动到目标位置,以达到铺放的目的。碳纤维六轴缠绕装置模型示意图,如图1所示。
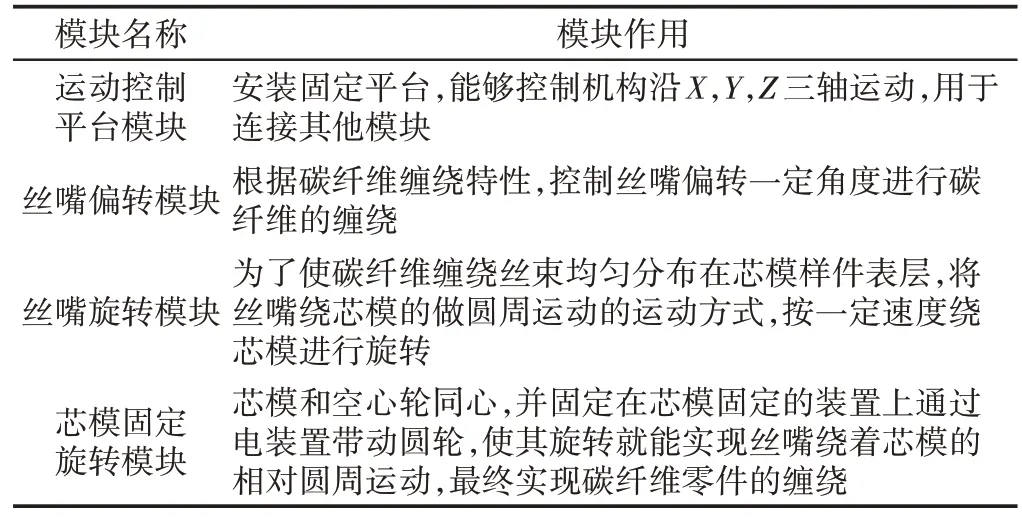
表1 碳纤维六轴缠绕装置模块Tab.1 Module of Carbon Fiber Six-Axis Winding Device
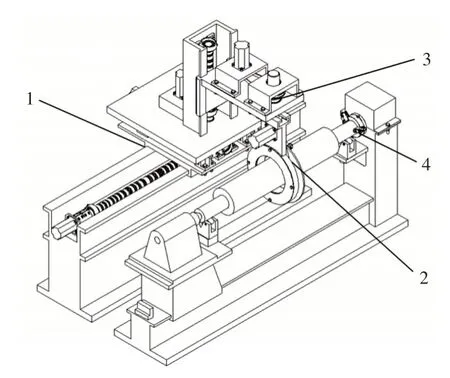
图1 碳纤维六轴缠绕装置示意图Fig.1 Diagram of Carbon Fiber Six-Axis Winding Device
本碳纤维缠绕装置具有六个自由度,分别为平台的左右移动(记为X轴),前后移动(记为Y轴),上下移动(记为Z轴),丝嘴的偏转模块(记为R轴),丝嘴的旋转模块(记为S轴),芯模的旋转模块(记为W轴),六轴位置示意图,如图2所示。
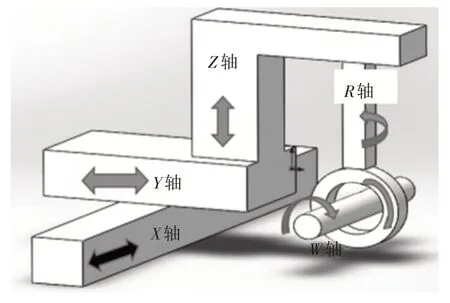
图2 碳纤维六轴缠绕装置的六轴轴位置示意图Fig.2 Six-Axis Shaft Position Diagram of Carbon Fiber Six-Axis Winding Device
X,Y,Z轴负责移动,控制空心轮到达指定位置;S轴负责旋转,当丝嘴移动到芯模的另一端时,通过R轴改变缠绕角度,再通过X,Y,Z轴的移动回到起点,如此往复,实现碳纤维的缠绕。
2.2 碳纤维六轴缠绕装置运动平台设计
碳纤维缠绕装置的设计分为X,Y,Z轴三部分设计。运动控制平台X,Y,Z三轴轴向运动滚珠丝杠,如图3所示。X轴向传动原理为滚珠丝杠的两端与轴承相装配固定在轴承座上,再通过螺栓将轴承座固定在缠绕装置底座上。电装置带动丝杠旋转时,丝杠螺母就带动横向移动板实现横向进给的往复运动。
图3 运动控制平台的滚珠丝杠Fig.3 Ball Screw of Motion Control Platform
缠绕装置的Y轴向的传动也采用滚珠丝杠的传动方式,其装置传动原理同X轴向一致。丝杠固定在轴承上,再固定在轴承座上,由螺栓固定在X轴向的移动板上。丝杠的四周有4个立柱,通过螺栓固定在X轴向移动的板上,立柱的上面各有一个滑块,与滑轨配合,使得滑轨在Y轴方向能够自由移动,滑块支撑的面是Y轴进给平面。当电机带动丝杠进行旋转时,就由丝杠螺母带动Y轴平面完成Y轴方向进给的往复运动。
缠绕装置Z轴结构主体一个方形的立柱,和Y轴移动板焊接在一起,二者均采用铸造成型,立柱内部采用滚珠丝杠传动。电装置通过同步带带动丝杠进行转动,丝杠螺母连接丝嘴偏转装置的支撑板。立柱的一面装有滑轨,与支撑板一侧的滑块配合,在电装置的驱动下实现Z轴方向的往复运动。
缠绕装置丝嘴的偏转结构主要用于是实现丝嘴的偏转,按照一定的角度缠绕碳纤维,丝嘴偏转模块示意图,如图4所示。这里设计的结构由电机装置采用带传动,通过带轮带动吊杆轴进行旋转,吊杆轴下端和丝嘴旋转模块相连接。其中电机装置固定在电装置架上,电机装置架通过螺栓固定在支撑架上。

图4 丝嘴偏转模块示意图Fig.4 Schematic Diagram of Wire Mouth Deflection Module Structure
丝嘴旋转模块模块主要作用是稳定可靠地将碳纤维丝束匀称缠绕至芯模表层。丝嘴旋转模块上装有丝嘴,是直接进行缠绕的运动模块,因此对其的要求相对较高。要求其在和芯模发生运动的时候能够具有良好的挠性,减震,对于外界的冲击具有缓冲的作用。这里的丝嘴旋转模块的结构,经过设计后,如图5所示。
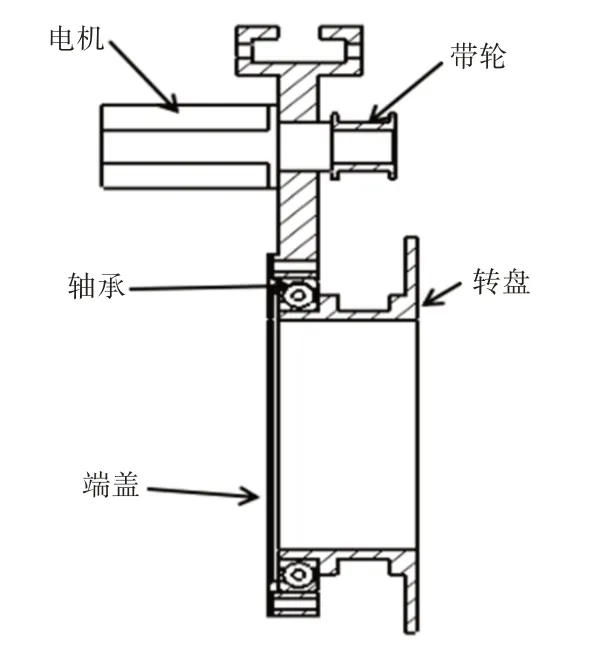
图5 碳纤维六轴缠绕装置丝嘴旋转模块结构图Fig.5 Carbon Fiber Six-Axis Winding Device Wire Mouth Rotation Module Structure
由于芯模旋转模块结构需要实现其能够旋转的功能,使用丝嘴绕芯模的圆周旋转的运动方式,同时需要设计相应的传动装置构,芯模必要时需要能够转动,通过三爪卡盘的一端施加动力源,带动芯模旋转,顶尖配合其旋转。通过伺服电装置带动同步带轮使三爪卡盘旋转,芯模旋转模块传动结构,如图6所示。
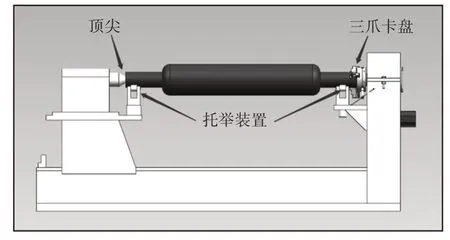
图6 碳纤维六轴缠绕装置芯模旋转模块设计结构图Fig.6 Carbon Fiber Six-Axis Winding Device Core Mold Rotation Module Design Structure
电装置通过电装置座固定在箱体的横板上,小带轮和电装置采用键连接,小带轮和电装置采用定位螺钉来定位。轴的一端和三爪卡盘采用螺纹连接,轴承一侧顶住端盖,另一侧通过套筒顶住同步带轮,依靠轴肩来实现带轮的定位,如图7所示。
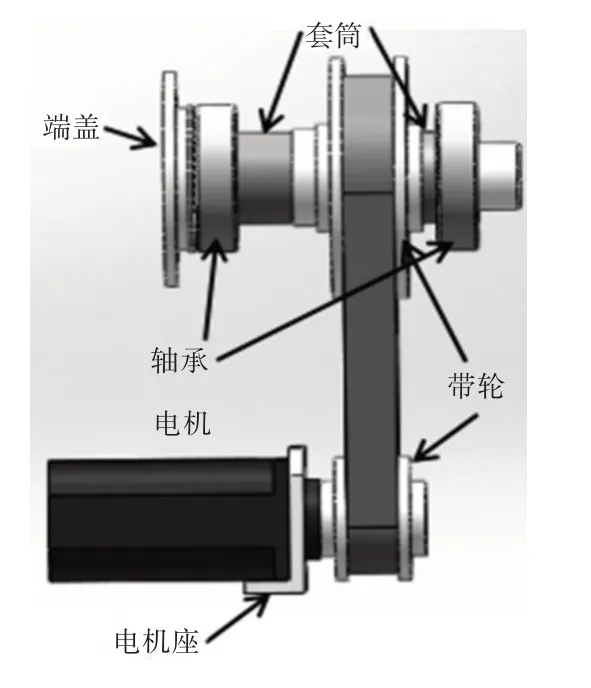
图7 碳纤维六轴缠绕装置芯模旋转模块传动结构图Fig.7 Carbon Fiber Six-Axis Winding Device Mandrel Rotation Module Transmission Structure Diagram
3 碳纤维六轴缠绕装置关键部件静态力学性能分析
3.1 碳纤维六轴缠绕装置关键零部件模态分析
碳纤维六轴缠绕装置X轴底座的震动会对X轴甚至其他轴产生影响,同时考虑结构强度和稳定性,故对其进行静力学分析和模态分析。这里采用三维软件Solidworks自带的插件Simulation进行上述两种分析。大致估算底座承受的重量远小于4000N,分析时按4000N进行计算。
经分析,底座的最大应力为0.3614MPa,远远小于材料的许用应力,如图8 所示。底座的最大变形为0.004628mm,是极小的变形量,对于X轴向的传动和缠绕精度产生的影响几乎可以忽略不计,结果均是在缠绕装置功能实现的误差允许范围之内。对其进行了五阶模态分析,如表2 所示。整体动态响应较稳定,动态响应相对稳定,其固有频率随着振型阶次的提升而相应得提升。

表2 不同阶次龙门架固有频率变化Tab.2 Variation of Natural Frequency of Gantry of Different Orders
3.2 丝嘴偏转模块分析
对丝嘴偏转模块的支撑架进行分析,确定其强度和精度能否满足要求。在设计中的丝嘴旋转模块和偏转模块两个模块的质量为20kg 左右。由于所设计的支撑架为悬臂结构,对其进行相关的静应力分析以及强度的校核。支撑架受力简图,如图9所示。
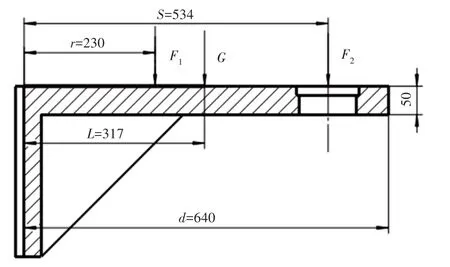
图9 支撑架受力简图Fig.9 Support Frame Force Diagram
由于铝合金的密度为(2.9×103)kg/m3,因此估算,支撑架自身的重量G为32kg,预估丝嘴旋转模块重量为25kg伺服电装置及其他零件按8kg。
铝合金的许用应力远超过10MPa,通过计算获得的最大应力为1.7MPa,由最大正应力小于材料的许用应力可知设计是满足弯曲变形的要求。通过支撑架有限元应力分析结果,可以得到其静应力为0.9839MPa,也没有超过1.7MPa,小于材料的许用应力。
由于材料受力变形会对缠绕装置的正常使用以及缠绕精度产生影响,因此需要对所设计的支撑架再进行挠度分析。将受力点和固定点的距离记为a,将支撑架的悬臂部分的长度极为d,材料弹性模量记为E,支撑架的材料的弹性模量为(6.9×1010)N/m2,通过计算分别求得支撑架受力G,F1,F2对应产生的挠度为(3.3×10-5)m,(0.46×10-5)m和(6.4×10-5)m。弯曲变形发生在同一方向上,将其三个挠度叠加,得到支撑架总的挠度变形为(10.2×10-5)m。
根据计算结果确定满足强度要求和挠度变形的要求。由于其为悬臂结构,稳定平衡的性能性较差,易于产生装置械疲劳。因此在自己初步计算后,再用有限元分析其应力和变形。从有限元分析得到支撑架的最大变形量为0.02082mm,小于计算的0.102mm,如图10所示。可知设计的支撑架变形量是极小的,可以直接忽略不计,对缠绕装置丝嘴偏转和旋转的功能实现的影响以及缠绕精度的影响也可以近似忽略不计。
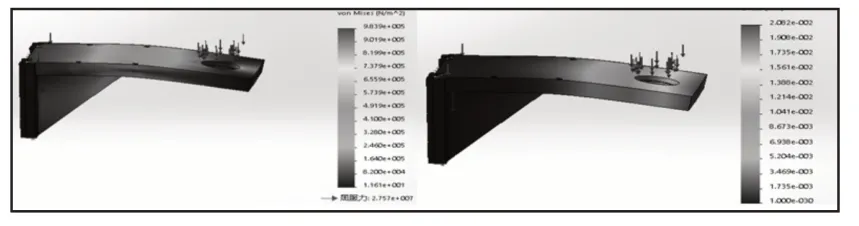
图10 支撑架变形、应力云图Fig.10 Deformation and Stress of Support Frame
4 ADAMS运动仿真与分析
在SolidWorks软件中将建立好的碳纤维六轴缠绕装置三维实体模型保存为Parosolid文件格式,其扩展名为*.X_T,然后导入到ADAMS进行运动仿真,忽略螺栓及轴承等对分析结果影响不大的零部件,主要对运动控制平台模块、丝嘴偏转模块和旋转模块以及芯模固定旋转模块进行动力学仿真。
在ADAMS 中进行运动仿真分析,首先将平台相关零部件设置成连杆。根据实际需要,将X轴平台、Y轴平台、Z轴平台与对应平台之间设置移动副,将丝嘴偏转模块与Z轴平台之间设置转动副;丝嘴旋转模块与丝嘴偏转模块之间设置转动副,将芯模固定旋转模块与支座之间设置转动副。将连杆发生接触的连杆之间两两设置接触。ADAMS 运动仿真设置路程,如图11所示。
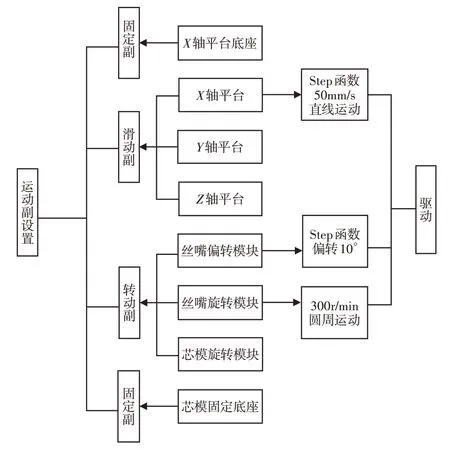
图11 ADAMS运动仿真设置流程图Fig.11 ADAMS Motion Simulation Setup Flow Chart
碳纤维缠绕过程主要运动是缠绕装置沿着芯模的轴向的运动,再设计过程中,芯模轴向长度为1000mm,为使轴向缠绕机构运动时不会和其它部件产生干涉,故增加其二分之一的长度作为X轴的行程,因此X轴的行程选择为1500mm。当丝嘴轴向的进给速率为(30~70)mm/s时,碳纤维缠绕的方式较均匀,因此选择最大的进给速率为50mm/s。由此在X平台与底座之间添加step驱动函数,设置驱动速度为50mm/s;丝嘴偏转模块使用step函数控制丝嘴在气瓶两端偏转;在丝嘴旋转模块和丝嘴偏转模块间的旋转副添加驱动函数,设置转速为300r/min,驱动运动构件运动状态,如图12所示。
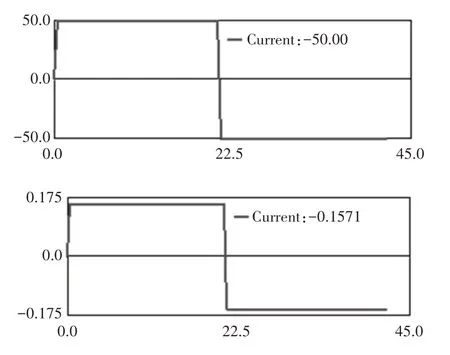
图12 运动构件运动状态Fig.12 Movement State of Motion State
在丝嘴表面添加标记点,用于追踪丝嘴的缠绕轨迹变化曲线,如图13所示。表示丝嘴轨迹相对于初始点的总位移变化矢量曲线,与X,Y,Z三个方向的分量。
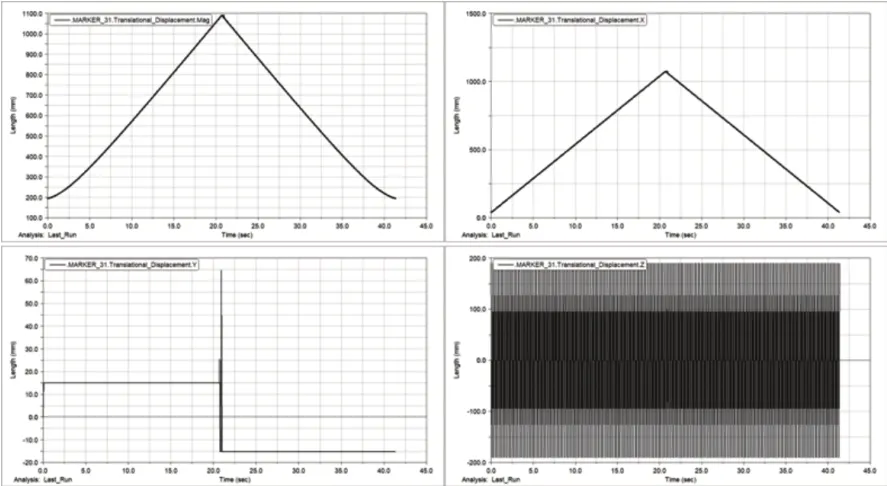
图13 丝嘴位移曲线Fig.13 Yarn Roll Displacement Curve
在缠绕过程中,根据丝嘴的轨迹变化曲线,丝嘴相对于缠绕构件初始点的整体位移保持稳定的上升,X方向的位移曲线接近总的位移曲线,实现一个周期的平稳运动;Y方向在运动过程中的瞬时位移变化,为丝嘴偏转模块在氢气瓶末端的角度偏转;Z方向的曲线变化接近正弦函数的变化曲线,跟随芯模进行旋转,沿着Z方向运动平稳。
5 气瓶缠绕成型轨迹规划算法
5.1 丝嘴运动数学模型与测地线方程
在结构设计中可知,丝嘴安装在丝嘴旋转模块,按照给定的运动,沿着芯模轴轴向做周期性匀速直线运动。首先需要建立缠绕气瓶数学模型,然后求解回转曲面测地线方程,最后根据测地线方程进行推导计算,得出丝嘴运动轨迹方程。
建立气瓶的数学模型,如图14所示。在XOZ平面上的母线z=f(x)绕着X轴旋转,得到了回转曲面A,曲面的参数方程{f(x)cosθ,-f(x)sinθ},其中,x—回转曲面在轴线X方向的坐标值;θ—旋转中心角,0<θ<2π。
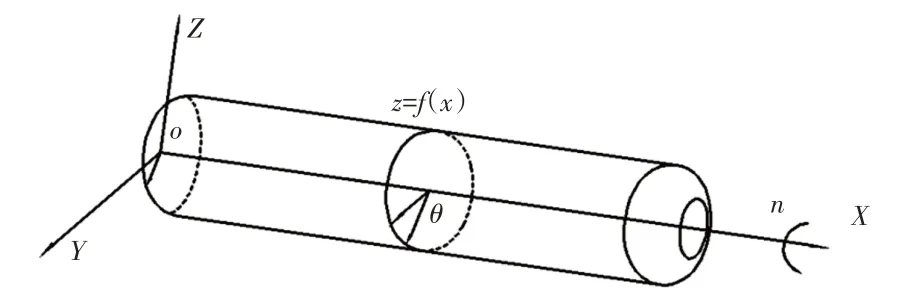
图14 气瓶的数学模型Fig.14 Mathematical Model of Gas Cylinder
采用测地线微分方程对缠绕过程进行求解,测地线微分方程根据式(1)、式(2)得出:
式中:h=h(t),k=k(t),G=rk′2,E=rh′2,其为决定曲面矢量函数r=r(h,k)的偏导函数,σ—h函数单位矢量到曲线切线矢量的有向角。
回转曲面参数方程r={f(x)cosθ,x-f(x)sinθ},取h=θ,k=x,带入相关方程,同时测地线满足Clairaut方程得到f(x)sinσ=RY,通过推导计算得到测地线积分表达公式,如式(3)所示:
5.2 运动轨迹方程求解
通过落纱点轨迹确定丝嘴的运动轨迹方程,建立气瓶的落纱点轨迹图,如图15所示。图中:M—落纱点;N—丝嘴的运动质点。将回转曲面方程以矢量形式表达为(x,θ)={f(x)cosθ,x,x-f(x)sinθ},由于M点为落纱点曲面上的一点,通过M点的测地线切向量的公式,如式(4)所示:
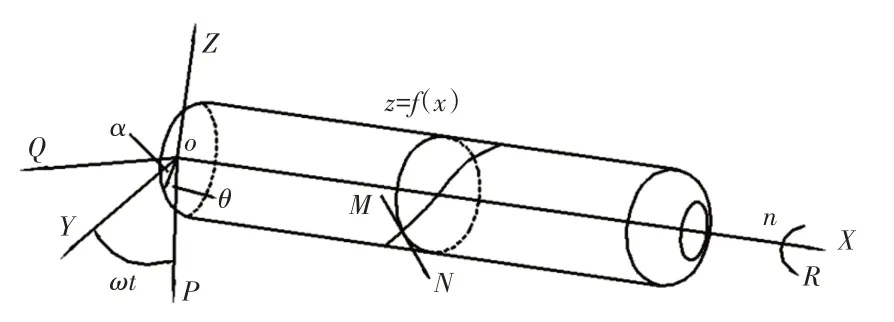
图15 纤维缠绕轨迹及坐标系Fig.15 Fiber Winding Trajectory and Coordinate System
建立两个坐标系原点皆为O点的坐标系。O-XYZ为相对地面的静坐标系,坐标系内任一点标记为(X,Y,Z);建立O-RPQ作为一个相对地面动坐标系,能跟随芯模一起进行旋转,R轴与芯模转轴重合,坐标系中的任意一点标记为(R,P,Q)。M点的坐标可以标记为{f(x)cosθ,-f(x)sinθ},过M点的测地线的切向量上的直线MN方程表示为:
在芯模转动之前,P轴和Y轴能够重合,落纱点M在芯模与Y轴方向夹角为θ的面上,当芯模按照图示方向以一定角速度旋转是,所建立的动静两个坐标系的转换关系式,如式(5)所示:
通过将MN直线方程的动坐标系下坐标,变换成静坐标系下坐标XYZ,利用三角函数合比性质,经过所得公式的相应换算,得到简化后的公式,如式(6)所示:
式中:α—落纱角,α=ωt -θ,它表示的是静坐标系中,丝嘴在运动平面XOY与经过落纱点所在面的夹角,此时落纱点M在静坐标系下可以表示为{}f(x)cosα,x,f(x)sinα,对式进行交叉相乘化简,又由于丝嘴运动面和XOY面重合,由数学关系可得Z=0,最终的到公式,如式(7)、式(8)所示:
上述计算得出的丝嘴空间坐标值X和Y即对应的丝嘴沿着往复运动轴X和丝嘴绕气瓶轴Y的运动方程。根据公式可以看到还有两个未知量x和α,可以对方程增加约束条件,如固定落纱角度值、悬线长度值和丝嘴的加减速变化规律,最终可以得到丝嘴在缠绕过程中更加准确的运动轨迹。
6 结论
这里针对碳纤维氢气瓶需求,设计出一款碳纤维六轴缠绕装置,将碳纤维六轴缠绕装置的结构分为运动平台模块,丝嘴偏转模块,旋转模块和芯模旋转模块共计四个模块进行具体结构设计。
利用SolidWorks Simulation和ADAMS分别进行有限元静力学分析和运动学仿真,评估了底座的支撑架的强度的稳定性,获得了装置的运动变化曲线,的缠绕过程进行轨迹规划,得到运动过程的运动方程。对于跟准确轨迹可以通过添加约束得到,用于指导后续装置的优化设计。
猜你喜欢
橡塑技术与装备(2022年2期)2022-02-14
橡塑技术与装备(2022年1期)2022-01-20
建材发展导向(2021年14期)2021-08-23
建设监理(2020年7期)2020-02-15
制造技术与机床(2019年11期)2019-12-04
制造技术与机床(2019年1期)2019-01-14
橡塑技术与装备(2018年18期)2018-09-22
制造技术与机床(2017年8期)2017-11-27
通信电源技术(2016年1期)2016-04-16
橡胶科技(2016年2期)2016-02-25
