
基于四轮转向与直接横摆力矩的汽车稳定性研究
2023-02-27 12:39吴磊,王琪,张鹏
机械设计与制造 2023年2期
吴 磊,王 琪,张 鹏
(太原理工大学机械与运载工程学院,山西 太原 030024)
1 引言
随着汽车轴距的加长,传统的前轮转向(Front Wheel Steer‐ing,FWS)汽车在低速行驶时转弯半径增大,当汽车行驶在狭小的空间时很难转弯或者掉头,容易发生剐蹭,在高速行驶时操纵稳定性差。四轮转向(Four-Wheel Steering,4WS)技术和直接横摆力矩控制是提高汽车转弯灵活性和操纵稳定性最常用的研究的方法。目前,国内外的学者对这两种控制方式进行了大量的研究。文献[1-3]分别采用前后轮转角比例控制、横摆角速度反馈控制和分数阶PID控制的方式来控制后轮的转角,在一定程度上提高了汽车的行驶稳定性,但无论怎样控制后轮转角,总是不能同时保证质心侧偏角和横摆角速度保持在理想值的附近。文献[4]对汽车进行了参数化设置,对比了不同速度、不同控制策略下的仿真曲线,但研究不同工况下汽车行驶状态时都需要重新计算数据,费时费力。文献[5]采用直接横摆力矩控制四个车轮的制动驱动力,提高了汽车的稳定性,但汽车低速转弯时仍然不够灵活。
针对以上研究存在的缺陷,这里同时采取前后轮转角控制和直接横摆力矩控制,将汽车模块化。在Simulink中搭建理想二自由度四轮转向模型和四个车轮的制动力矩分配模块,利用比例控制策略和模糊控制策略将后轮转角和四个车轮的制动力矩分别输入到CarSim中进行控制。在CarSim和Simulink中搭建联合仿真平台,分别进行低速角阶跃实验和高速单移线实验,观察车辆行驶轨迹、质心侧偏角和横摆角速度的仿真曲线。
2 建立理想二自由度四轮转向汽车模型
以线性二自由度的四轮转向车辆模型作为汽车的理想模型,将汽车简化为只有侧向运动及横摆运动这两个自由度,其微分方程为:
式中:k1、k2—汽车两前轮、两后轮的侧偏刚度;β—整车的质心侧偏角;ωr—汽车的横摆角速度;u—汽车纵向速度;a、b—前、后轴到质心的距离;δ1、δ2—前、后轮转角;Iz—汽车绕z轴的转动惯量。
当后轮转角δ2=0时,联立式(1)中的两式,消去质心侧偏角β,可得到稳态响应下横摆角速度的理想值为:
考虑到行车安全性,汽车在不同路面上行驶时,通常需要满足ωr≤ωrmax=,所以理想横摆角速度值为:
从整车主动安全性和稳定性角度考虑,应尽量使车辆不发生侧滑现象,保证车辆的行驶轨迹稳定跟随,因此,理想质心侧偏角在此设定为0。在Simulink 中搭建理想二自由度四轮转向模型,如图1 所示。
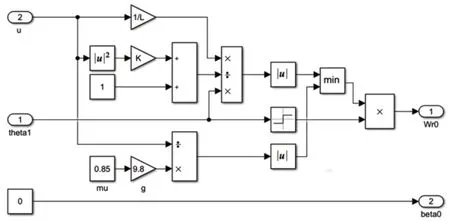
图1 汽车理想二自由度四轮转向模型Fig.1 Automobile Ideal Two-Freedom Four-Wheel Steering Model
3 控制策略的建立
3.1 前后轮转角比例模块的建立
设前后轮转角比例系数k=δ2/δ1,因为汽车进入稳态时的横摆角速度为定值,所以=0,代入式(1)中消掉ωr,就得到汽车稳态转向时质心侧偏角β=0时k值应满足条件[6]:
在simulink中搭建比例控制模块,如图2所示。
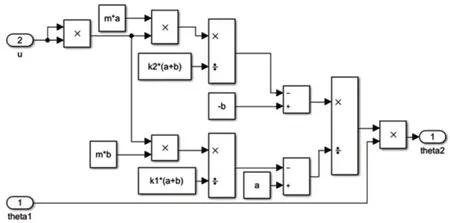
图2 前后轮转角比例模块Fig.2 Front and Rear Wheel Angle Proportional Module
3.2 模糊控制器的建立
由于汽车行驶状态是一个非常复杂的过程,对于某些控制量很难建立准确的数学表达式。模糊控制则不需要建立精确的数学模型,主要借助技术人员的实践经验对系统的模糊规则进行设计,因而具有较强的鲁棒性,适合研究非线性时变系统。
3.2.1 确定模糊子集与隶属度函数
将实际横摆角速度、实际质心侧偏角与理想横摆角速度、理想质心侧偏角分别做差,将差值作为二阶模糊控制器的输入变量,以所需的附加横摆力矩作为模糊控制器输出变量。选用高斯型函数与三角形函数相结合作为两输入变量隶属度函数,选用三角形函数作为输出变量的隶属度函数,其中,输入、输出变量的模糊等级均选为7级{负大,负中,负小,零,正小,正中,正大},分别对应{NB,NM,NS,ZO,PS,PM,PB}。
横摆角速度误差Eω和质心侧偏角Eβ的基本论域范围均为[-1,1],补偿力矩M的基本论域范围为[-19500,19500],输入、输出变量论域范围均为[-1,1],Eω和Eβ量化因子分别是Kω=1,Kβ=1,输出变量M的量化因子KM=19500,隶属度函数[7],如图3、图4所示。
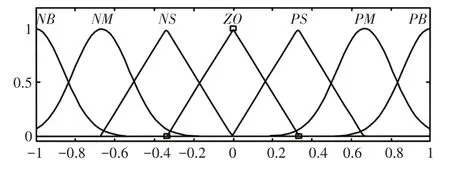
图3 输入变量Eω、Eβ的隶属度函数Fig.3 Membership Function of Input Variables Eω、Eβ
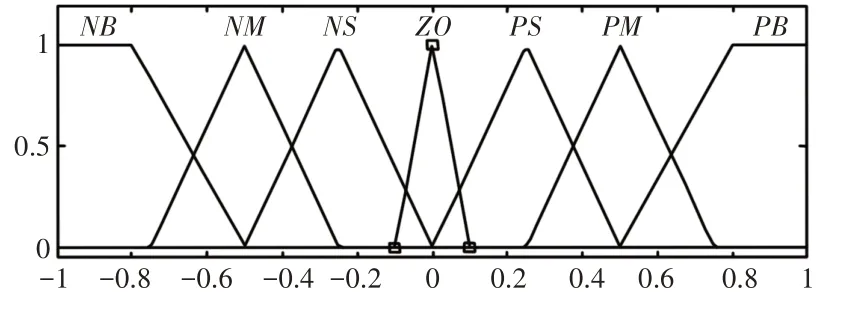
图4 输出变量M的隶属度函数Fig.4 Membership Function of Output Variable M
3.2.2 模糊控制规则的建立
模糊控制规则是确立输入变量与输出变量数值关系的语言规则,对于控制效果的优劣尤为重要,因此根据专家的研究经验,采用ifEωandEβThenM的形式制定模糊控制规则,如表1所示。模糊控制输入、输出关系曲面,如图5所示。

图5 模糊控制器输入、输出关系曲面Fig.5 Fuzzy Controller Input and Output Relationship Surface
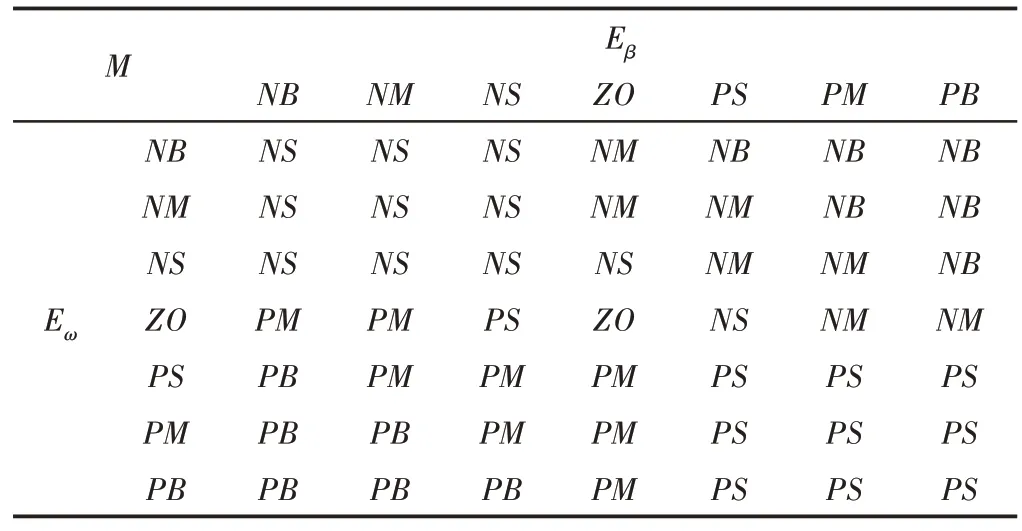
表1 模糊控制规则Tab.1 Fuzzy Control Rules
4 制动力矩分配模型的建立
当汽车失稳时,通过对某一侧车轮施加制动力,就会产生一个补偿横摆力矩,可以调整汽车的行驶状态,使汽车保持稳定行驶。采取的制动车轮分配规则,如表2所示。表中:ωr—实际横摆角速度;ωr0—理想横摆角速度[8]。
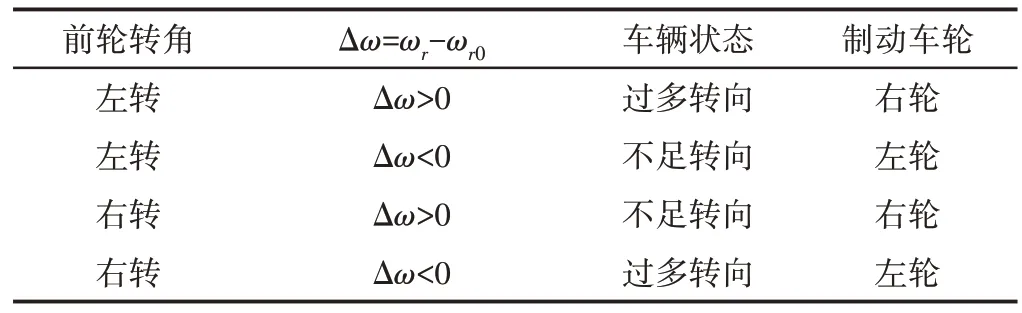
表2 制动车轮分配规则Tab.2 Brake Wheel Allocation Rules
根据理论力学知识可知汽车失稳后,回稳所需补偿力矩M大小应满足:
式中:Ff、Fr—前、后轮制动力;Bf、Br—前、后车轮轮距。
根据前后车轮受到的垂直载荷大小比例来分配前后车轮制动力大小,其中:
式中:Ffz、Frz—前、后车轮所受垂直载荷。根据式(5)、式(6)可得:
所以,
式中:Tbf、Tbr—前、后车轮制动力矩;R—车轮滚动半径。
根据式(5)~式(8)在Simulink中搭建制动力矩分配模块,如图6所示。
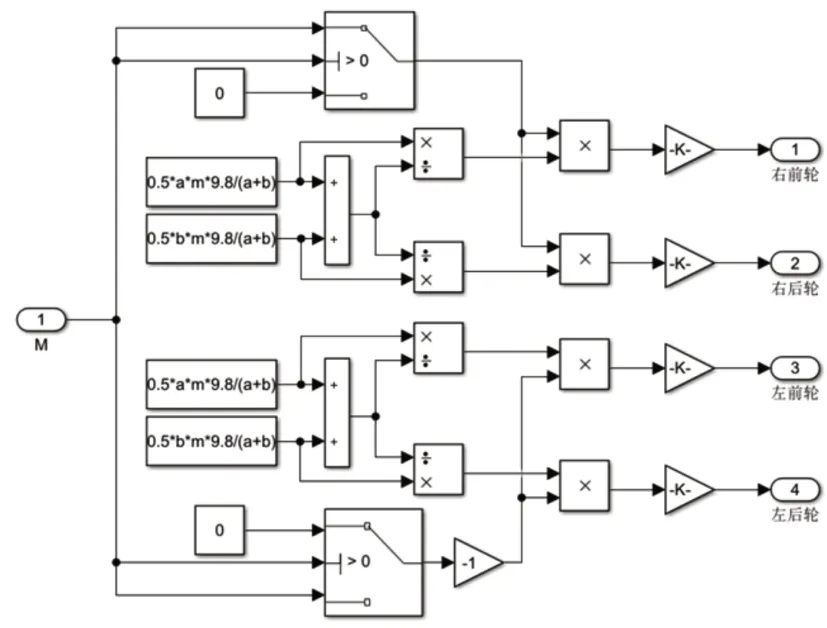
图6 制动力矩分配模块Fig.6 Braking Torque Distribution Model
5 CarSim-Simulink联合仿真分析
在CarSim 和Simulink 中搭建控制模型,设置道路摩擦系数为0.85,仿真时间取10s,并且与前轮转向、前后轮转角成比例控制、横摆角速度反馈控制、前轮转角比例与横摆角速度反馈联合控制进行仿真对比分析,联合仿真模型[9-10],如图7所示。
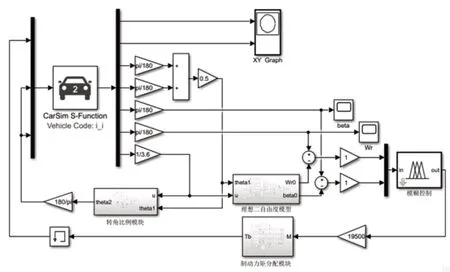
图7 CarSim-Simulink联合仿真模型Fig.7 CarSim-Simulink Co-Simulation Model
仿真选取的汽车参数根据CarSim 中B-Class,Hatchback 2012车型选取,如表3所示。
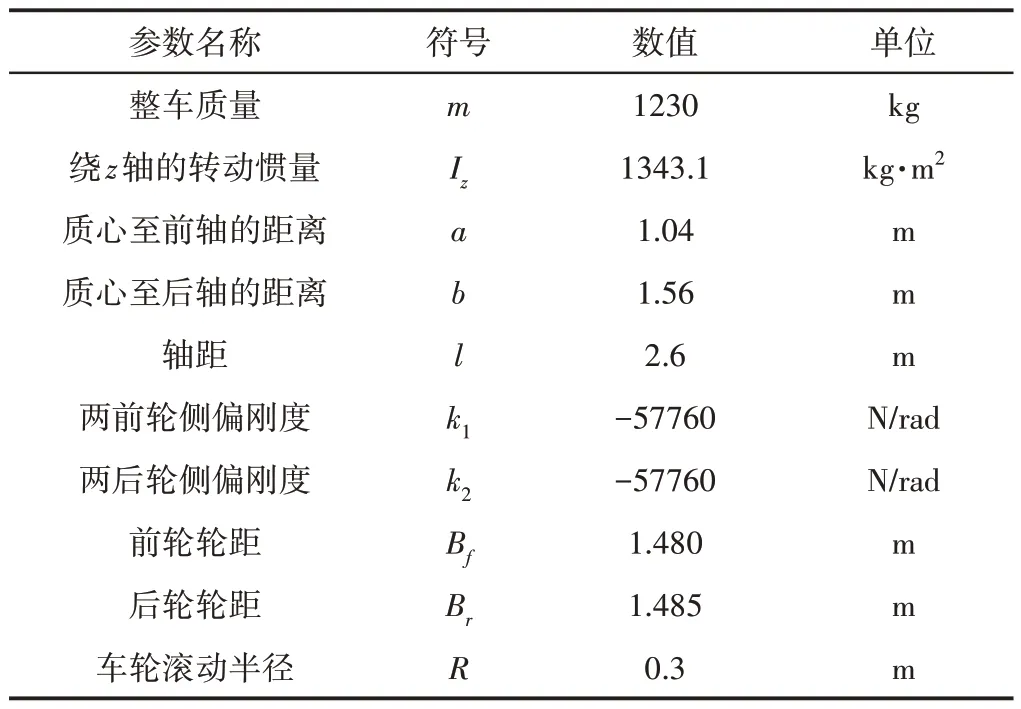
表3 车型参数Tab.3 Model Parameters
5.1 低速角阶跃仿真实验
在CarSim模型中给前轮角阶跃信号为6度,车速为20km/h,模拟汽车低速转弯行驶,仿真结果,如图8~图10所示。
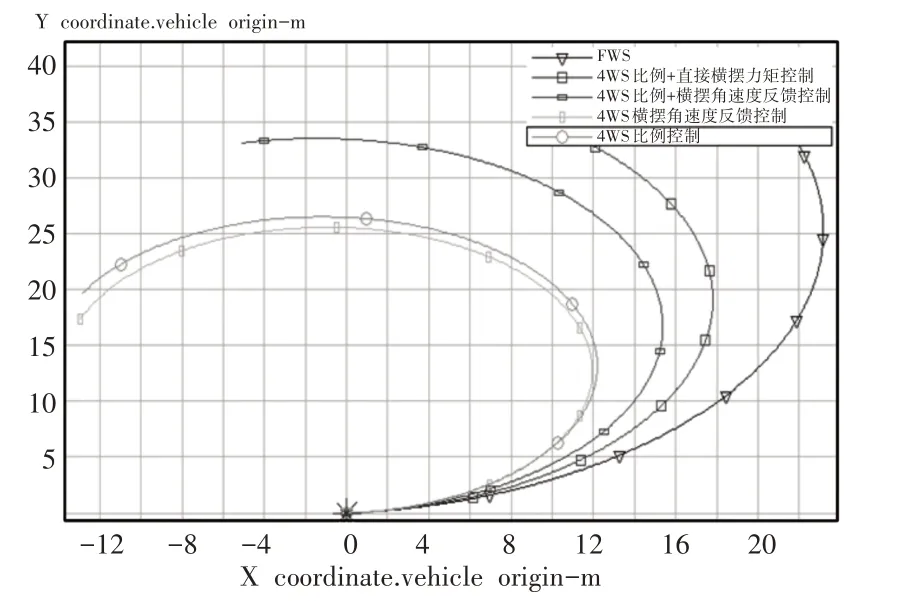
图8 汽车行驶轨迹曲线Fig.8 Car Driving Trajectory Curve
如图8所示,相对于FWS汽车四种控制策略均能够减少汽车的转弯半径,增加汽车的灵活性,其中4WS比例控制和4WS横摆角速度反馈控制能够使汽车的转弯半径达到最小。
如图9所示,相对于FWS车辆4WS比例控制、4WS横摆角速度反馈控制、4WS比例+直接横摆力矩控制均能使汽车的质心侧偏角基本保持为0,提高了汽车的行驶稳定性。如图10所示,相对于FWS车辆4WS比例控制和4WS横摆角速度反馈控制可以使汽车的横摆角速度的值增大一倍,极大的缩小了转弯半径,但过大的横摆角速度会给驾驶员带来极大的驾驶负担,容易造成车辆甩尾现象,4WS比例+直接横摆力矩控制能够使汽车的横摆角速度大致接近前轮转向汽车的值,给习惯于驾驶前轮转向汽车的驾驶员带来良好的驾驶感,其他控制策略下的横摆角速度增益太大,给驾驶员带来严重的不适。
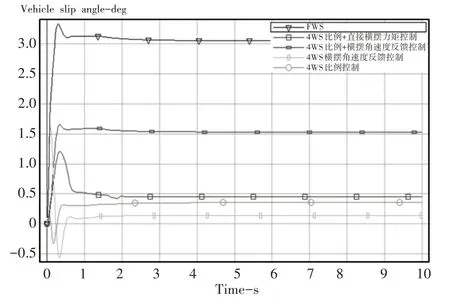
图9 质心侧偏角曲线Fig.9 Side-Slip Angle Curve
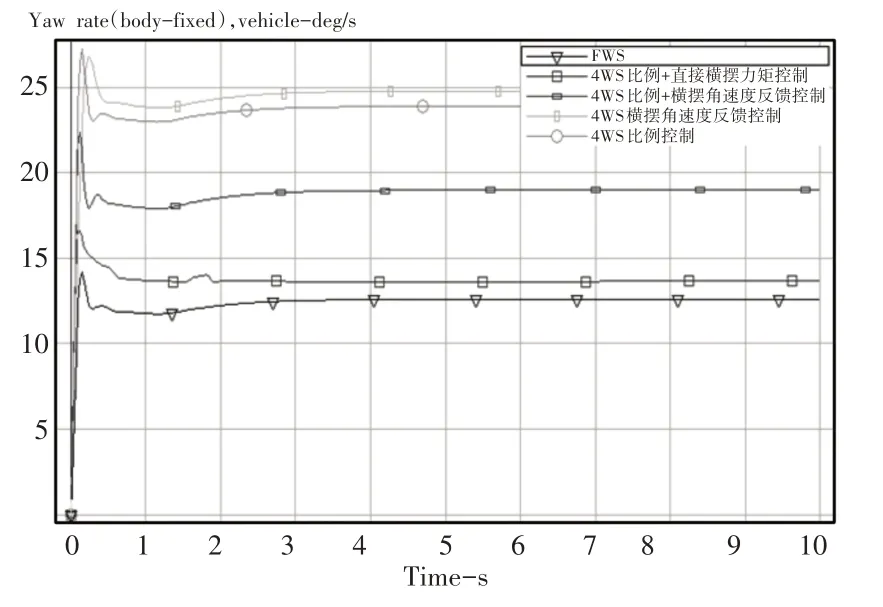
图10 横摆角速度曲线Fig.10 Yaw Velocity Curve
5.2 高速单移线仿真实验
在CarSim模型中给前轮输入正弦转角信号,车速为80km/h,模拟汽车高速变道行驶,仿真结果,如图11~图13所示。
如图11所示,在单移线仿真工况下,相对于FWS,4WS能够迅速完成变道并趋于稳定,增加了汽车的稳定性。如图12所示,4WS比例+直接横摆力矩控制能够使汽车的质心侧偏角基本保持为零,控制效果明显优于其他控制策略。如图13 所示,4WS 比例+直接横摆力矩控制使汽车横摆角速度的值最接近FWS汽车,给驾驶员带来良好的驾驶感。
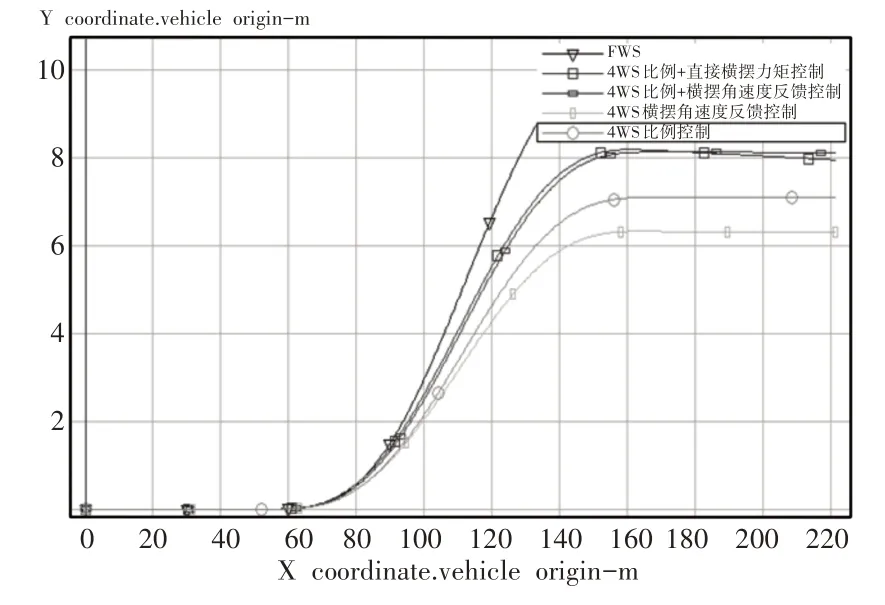
图11 汽车行驶轨迹曲线Fig.11 Car Driving Trajectory Curve
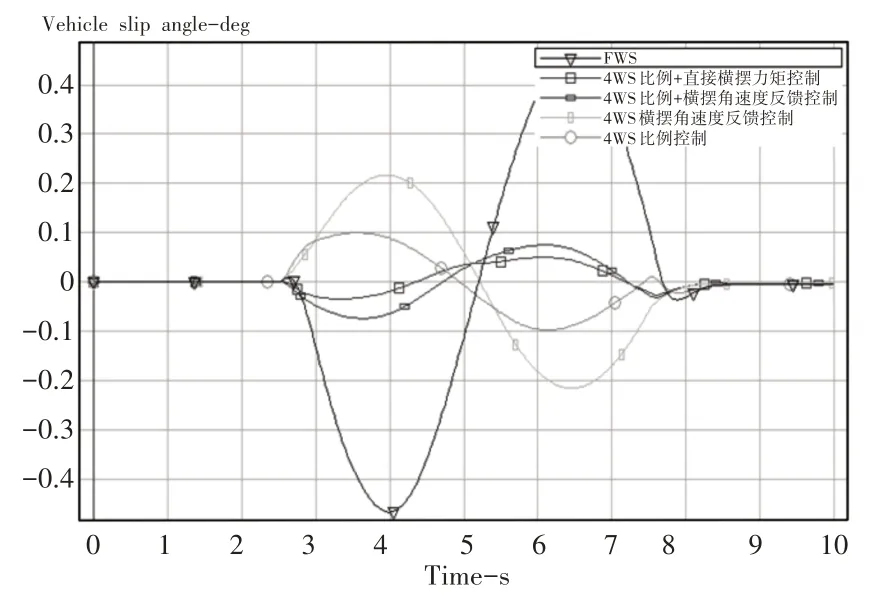
图12 质心侧偏角曲线Fig.12 Side-Slip Angle Curve
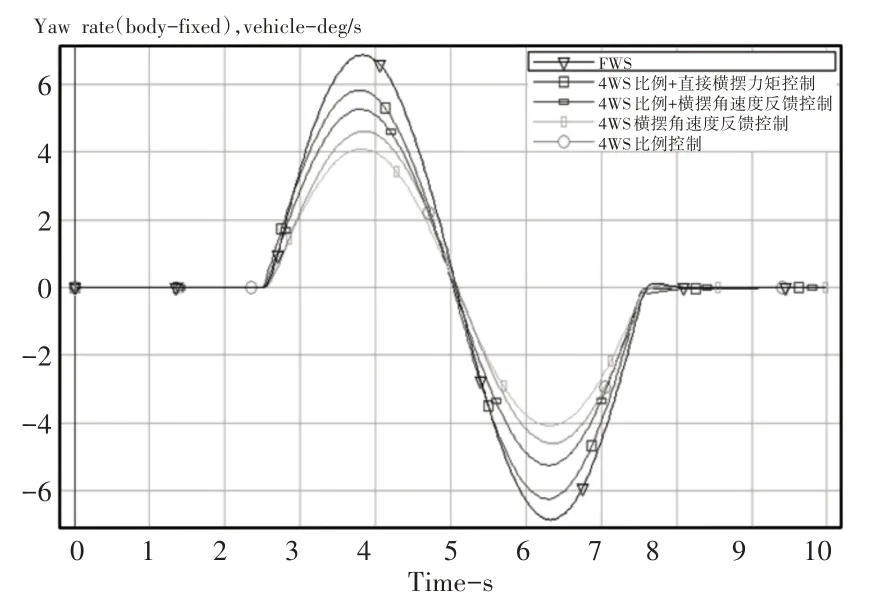
图13 横摆角速度曲线Fig.13 Yaw Velocity Curve
6 结论
采用前轮比例与直接横摆力矩联合控制的控制策略,在Car‐Sim和Simulink中联合仿真,在不同的工况下进行仿真实验。由仿真结果可知,不同的控制策略对于汽车行驶轨迹、质心侧偏角和横摆角速度的控制效果不同。但从整体上分析,4WS比例+直接横摆力矩控制的控制策略在低速时可以减小汽车的转弯半径,在低速和高速行驶中质心侧偏角基本保持为零,横摆角速度接近前轮转向汽车给驾驶员带来良好的驾驶感,提高了汽车的灵活性和稳定性。
猜你喜欢
民用飞机设计与研究(2020年4期)2021-01-21
新课程·中学(2019年7期)2019-09-17
小学生学习指导·爆笑校园(2019年6期)2019-09-10
物理教学探讨(2018年1期)2018-02-13
中学生数理化·高一版(2017年3期)2017-07-08
火控雷达技术(2016年1期)2016-02-06
红蜻蜓·低年级(2015年11期)2016-02-02
中国铁道科学(2015年4期)2015-06-21
汽车文摘(2014年10期)2014-12-13
中国自行车·骑行风尚(2014年4期)2014-10-10
