
基于医学实验的多自由度可调节人体复合训练设备研究*
2023-02-24 05:20周好斌刘泽强
机电工程技术 2023年1期
周好斌,唐 帅,刘泽强
(西安石油大学材料科学与工程学院,西安 710065)
0 引言
随着当前社会的不断进步和发展,医疗及医学实验变得尤为重要,因此人体医学实验设备的需求也不断增加。分析与掌握人体离心机结构与稳定性是当前医学实验的首要任务。
国内外对人体离心实验设备做了大量研究。在新型短臂离心机的研制与应用研究[1]、人力短臂离心机的研制与应用研究[2]等之前研究中。上述研究虽然实现基本实验要求,但没有涉及到多自由度、可调加速度、实验记录分析。因而前人设计的设备存在一定的局限性。
本文设计的人体复合训练设备是一种基于离心机结构及改进,从而获得医学航空实验所需的离心力的人体医学实验设备。基于目前国内航空事业发展迅速,但随着飞机性能的增加,飞行员在半空承受的G值不断提高,高G值可引起飞行人员意识的丧失[1],从而严重威胁飞行安全,并且长期处于失重环境下,会对人体机理有一定影响,会导致流体静压消失,体液头向分布,引发机体生理发生适应性变化,对神经系统、免疫系统、血液系统等造成不良影响,在返回地面后,飞行员会出现运动力下降,耐受力不足等一系列表现,因此失重实验对于航空飞行至关重要。本文采用Solidworks对实验设备进行建模和受力分析,分析目前实验当中存在的自由度和加速度调节问题,设计一种多自由度、可调节加速度、带影像记录的人体复合训练设备。针对以前实验出现震动的问题,采用Abaqus建立有限元模型进行模态分析,优化结构和实验参数实验稳定运行。验证其准确性和有效性。
1 总体设计原理
1.1 基本运动原理
人体复合训练设备是基于人工重力原理和转臂结构设计而成。本装置由动力驱动部分、齿轮传动部分、工作转臂部分、载人台和控制柜部分组成。
如图1所示,人体复合训练设备工作时,主要分3个方向的运动,一是围绕主轴的旋转运动;二是围绕旋转轴的左右摇摆运动;三是围绕俯仰轴的前后移动运动;设备工作时围绕主轴以ω角速度旋转获得实验所需重力加速度,同时通过左右摇摆运动和前后移动获得方向不同加速度G值,以达到实验所需要求。通过调节转速大小和复合运动来实验不同大小和方向的G值,这是该设备基本设计原理[3]。

图1 人体复合训练设备原理
向心力计算公式如下:
式中:m为物体质量;g为重力加速度;R为回转半径;FN为向心力。
在工程上,离心机的转速n单位通常为r/min,则:
综合上式和圆周运动基本定理可得相对离心力计算公式[2]:
1.2 复合运动离心力计算原理
本文的人体复合训练设备是一种基于基本圆周运动获得离心力的训练设备,同时通过复合运动来实验运动中调节离心力大小的功能[4]。为此设计了前后移动和左右摇摆运动的设备结构,通过前后移动调节半径R来调节离心力大小,通过左右摇摆运动来调节角速度ω实现离心力的再次调节。图2为离心力计算简图。
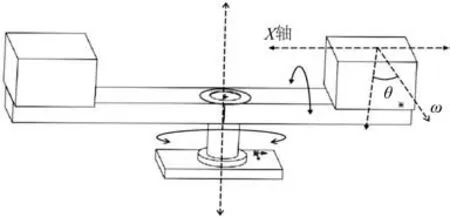
图2 离心力计算简图
记设备的半径为R,运动调节后的半径为R1,设备在X轴运动距离为W,则有:
记设备原来的角速度为ω,设备沿X轴左右摇摆的角度为θ,调节后沿垂直X轴的角速度为ω,则:
因此再次计算离心力可得:
上式为向心力分量计算:
上式为相对离心力分量计算,上式的计算有利于后期设计设备结构数据和设计控制软件时的参数设定。
2 结构设计方案
2.1 转轴结构设计
对于整个人体复合训练设备结构,主轴的设计是最为基础且重要的一步,其中主轴起到整个设备的支撑作用和旋转获得g值[5],以及传递力和力矩的作用。所以主轴的结构、刚度等直接影响整体设备的性能。如图3所示。首先为了保证整体平稳运行,采用强度较高,厚度大的旋转主轴支撑结构,同时采用双轴承安装旋转支架结构,内部流通孔保证后续电机、控制器、驱动器、pc端等线路通过。底座和主轴连接采用4 cm高强度钢圆盘连接,保证设备运转之后整体稳定性,同时底座设计多个螺孔,使用刚强度螺丝与底部地面连接,进一步加强稳定性。
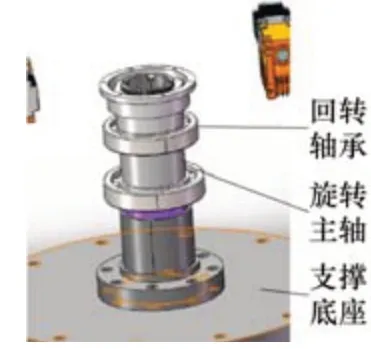
图3 转轴结构
2.2 转臂结构设计
转臂是整个设备载人和旋转的主要承力部件。但是同时为了保证整个设备旋转的高速和平稳,考虑风阻的情况,转臂不能过于庞大,以及保证质量不能过大。因此转臂的结构合理性对于设备至关重要[6]。如图4所示。
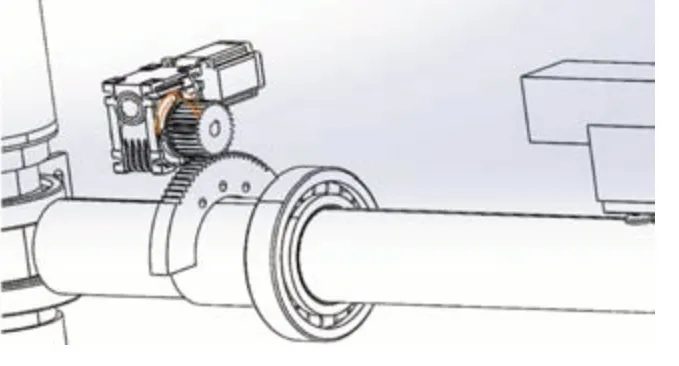
图4 转臂摇摆齿轮
对于转臂的设计,首先需要满足设备的基本运动和自由度,基本运动分为转臂的左右摇摆和自身转动,为此考虑结构简便高效下设计了转臂摇摆齿轮结构,同时为了保证设备的简洁性转臂摇摆齿轮设计为扇形齿轮,与电机齿轮相啮合,在设备运转时,电机转动带动转臂摇摆齿轮转动,实现整体转臂左右摇摆运动[6]。转臂的整体框架设计采用Q235碳素结构钢板同时只保留了框架受力结构部分框架,其余均挖空最大程度减少设备质量,提高整体设备运转速度以及平稳性。如图5~6所示。
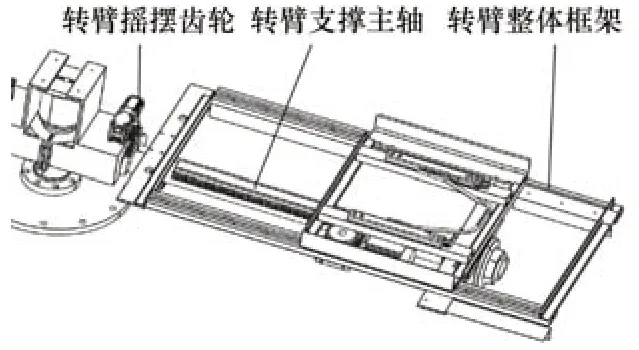
图5 转臂结构
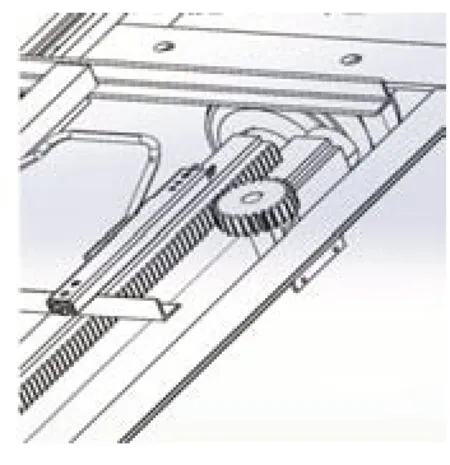
图6 载人台移动齿
2.3 载人台结构设计
载人台是人体复合训练设备的最后重要一环,载人台结构关乎人体实验的舒适性,复合运动的准确定,设备的美观性等。载人台主要由载人台底座,载人台座椅,载人台移动齿和步进电机组成。如图7所示。

图7 载人台结构
载人台的运动主要分为座椅前后移动和座椅俯仰调节,通过步进电机连接齿轮啮合载人台移动齿[7]。通过驱动电机达到载人台前后移动配合整体设备完成复合运动。同时载人台前后带有正负限位开关防止出现误操作[8]。
整体结构由底座框架连接转臂转轴,转臂主轴转动时带动整体转动,载人台座椅通过两个滑轨连接在底座上,座椅前方配备一个踏板,同时座椅可进行上下幅度调整以满足人体舒适性,座椅采用人体工学设计,同时前后的限位开关最大程度保护人体实验的安全性[9]。
3 总体结构
设计人体复合训练设备时,主要需要解决多自由度和可调节加速度的模拟,为了满足实验需求,还需计算电机功率、设备转速、风阻等影响。因此需要最大程度简化设备结构,达到实验要求,保证实验真实性。
人体复合训练设备结构整体包括载人台、转轴结构、转臂结构,驱动装置由一个伺服电机和4个直流调速电机组成。如图8所示,整体设备承轴向形状,设备配备电机驱动器,控制器和上位机控制程序,精准控制设备运转。设备整体安装与底部支座,由电机向转轴提供动力保证设备基本运行,实验时启动上位机程序控制控制器[10],向电机发送指令,主轴开始运转。并提前计算实验所需参数,调节转臂结构左右摆动实现多自由度离心加速度控制,并通过转速和载人台前后移动控制离心加速度大小,实现实验模拟的真实性。

图8 总体结构
4 静态支撑模拟分析
静态支撑作为人体复合训练设备中重要的支撑部位结构,在设备运转时随着转臂结构的转动会发生周期震动。因此,为了防止转臂结构和外部激励频率发生共振,影响结构运转和实验数据,在Abaqus中建立有限元模型进行模态分析[11]。
为了减少计算机工作量,对模型进行以下简化操作:(1)将倒角、圆角和螺纹孔等忽略,降低网格划分难度,提高计算精度和速度;(2)保留主要力学特征,将不影响计算准确性的零件简化处理,如:螺栓、螺母和轴承等。
将简化后的模型在Abaqus中建立静止支撑的有限元模型,设置其材料属性;静止支撑的材料为Q235碳素钢,输入材料的密度、弹性模量和泊松比,如表1所示;然后建立装配体,选择线性摄动中的频率分析;然后设置边界条件,主要设置静止支撑底部完全固定;然后进行网格的划分,单元类型设置为(C3D8R)八结点线性六面体单元[12],近似全局尺寸选择合适参数,其他参数保持默认值;最后提交作业,查看计算结果。

表1 材料参数
静态支撑前4阶振型图如图9所示,固有频率如表2所示,根据复合训练设备计算工作工程最大转速不超过25 r/min,因此计算工作中所产生的激励频率远低于1 246 Hz,所以工作中不会发生共振,结构运行稳定[13-14]。

表2 静态支撑的固有频率

图9 静态支撑前4阶振型
5 测试验证与结果分析
依据工程图纸对人体复合训练设备进行生产加工,进行实际装配后,主要关注机械结构是否出现装配错误,加工误差等。运行途中是否出现干、共振等问题。加工设备如图10所示[15]。

图10 人体复合训练设备实物
在设备测试过程中,首先验证设备机械运转是否正常,其次测试设备初期设计的多自由度和可调节加速度,通过控制模式精准控制设备转臂摇摆和前后移动,设备在运转中可成功实现多自由度调节和加速度精准控制。且设备运转平稳,无共振和噪声出现。通过对设备的运行调试,结果表明离心机总体结构可靠,在最大转速下,运行过程稳定,达到了预期效果,并且满足最大加速度变化率,能够达到动加载实验需要。在主轴运转过程中,实现了多个轴向的加速度模拟,模拟出真实的飞行环境。最后经过参数设置和调整,本方案的人体复合训练设备预防了共振的发生,综合性能满足实验要求。
6 结束语
(1)对人体复合训练设备总体方案进行合理设计、设备运行状态进行分析研究、设备运行震动进行测试研究。解决了人体复合训练设备实验中自由度单一的问题,实现加速度精准可调节控制,解决了以往设备运行中途共振的问题[16]。
(2)本文对人体复合训练设备总体基本离心力进行计算,并对总体结构合理设计。使用Solidworks对各个结构进行设计并装配,模拟设备运行状态进行合理改进。最终确定人体复合训练设备的总体和各个零件尺寸,计算设备所需最大功率,合理选型电机装配。
(3)在模拟运行等完成后,加工各个结构,选型电机,在工厂进行加工装配测试,连接电机、驱动器、控制器、上位机等线路,最终装配完成测试设备实际运行状态。工作运行状态稳定,满足实验要求参数。为研究人员对于人体在高空飞行状态下的身体情况提供理论数据。
猜你喜欢
宁夏医科大学学报(2022年6期)2022-11-22
宁夏医科大学学报(2022年8期)2022-11-22
国际太空(2021年8期)2021-11-05
轮胎工业(2020年2期)2020-03-01
临床肝胆病杂志(2017年1期)2017-03-07
太空探索(2016年12期)2016-07-18
太空探索(2016年9期)2016-07-12
太空探索(2016年6期)2016-07-10
装备环境工程(2015年5期)2015-02-28
装备环境工程(2015年5期)2015-02-28
