沥青路面3D智能摊铺施工技术探讨
2023-02-14 05:37:50廖波
交通科技与管理 2023年1期
廖 波
(贵州桥梁建设集团有限责任公司,贵州 贵阳 550001)
0 引言
传统的摊铺技术前期施工准备工序繁多,如路面摊铺前,要对导线中线水准点进行复测、对断面进行检查与补测,打桩安装钢丝导线作为引导高程控制,这些工作均需要人工来完成,而且人为误差、钢丝挠度、机械振动等都会对路面施工精度产生影响,不仅会使施工质量达不到要求,还会造成材料浪费[1]。随着技术的进步,沥青路面摊铺施工技术也在不断改进,为提升路面施工质量,施工企业在三新技术上(新技术、新工艺、新材料)不断加大人力、物力和财力的投入。该文主要介绍一种将道路设计、测量、摊铺施工等关键环节综合考虑、同步进行的3D 智能沥青路面摊铺技术。目前,3D 智能摊铺施工技术在路面摊铺中应用广泛。
3D 智能摊铺技术最早应用于建筑领域中,后随着施工技术日益成熟延伸到路面摊铺中,并由此产生了一系列智能摊铺技术。与传统摊铺技术相比,3D 智能摊铺技术不需要拉线、放样,大幅节省了人力、物力成本,减少了人为测量误差,提高了路面摊铺的精度。利用智能摊铺系统控制摊铺精度,有效解决了传统摊铺技术中因高温、振动等因素导致实际坡度存在的误差问题,同时节约人工成本,提高施工效率[2],但3D 智能摊铺技术受外界因素干扰存在局限性。因此,该文针对沥青路面3D智能摊铺施工技术进行以下探讨。
1 技术原理
基于Topcon-mmGPS 提出一种三维智能摊铺控制系统,该技术系统主要由测量、摊铺两部分组成。工作流程:①该设计参数转化为3D 数据输入系统,以满足设计需求;②按照设计提前将参数输入到系统中,并获取高程信号;③将采集到的高程信息进行数据处理,实现了在摊铺过程中自动控制摊铺工艺,并能适时地调节摊铺机熨平板的方位,以改变摊铺面的坡度和高度,从而达到设计要求的平整度和铺层厚度,达到精准控制自动化摊铺的目的;④3D 智能摊铺施工技术可对整个沥青路面施工中的相关参数进行实时监测,并及时对工程质量问题进行快速的检查修正。
(1)测量控制系统工作原理:由GNSS 基准站、激光发射机、mmGPS 流动站三大部分组成。
工作时,将GNSS 基准站置于已知坐标位置,GNSS基准站以无线方式将RTK 改正数据、差动信号实时传送给周边环境,从而为机载设备和探测装置提供一个高精度的3D 定位参考点。
(2)3D 智能摊铺控制系统工作原理:摊铺控制系统以信息技术为基础,通过GNSS/激光接收机,获取GNSS 接收机、控制器等提供的资料信息。在摊铺过程中,通过车载GNSS/激光接收器,接收激光发射器所发出的激光和GNSS 卫星信号,然后将其发送给GNSS 接收器,由GNSS 接收器对信号进行转换,同时对数据进行处理,以得出摊铺机熨平板的平面、高程等数据,再把定位信息传送到控制器,并按照预定的设计参数产生对应的控制信号;采用液压阀对摊铺机拖动臂油缸进行摊铺方向、高度的调节,实现了对铺面质量的实时、精确控制[3]。
机载GNSS/激光接收机采用可自动或手动提升的支撑,与摊铺机熨平板连接牢固。机载GNSS/激光接收机在安装时,需精确测量和校正机载GNSS/激光接收机和熨烫板的相对位置,使其能够准确地计算出熨烫板的高度和位置数据。
2 摊铺效果分析
为验证3D 摊铺施工技术效果,在路段施工长度为100 m 的试验段,该段为城市次干路,其路面构造由上至下分别为4 cm 级细粒状沥青混凝土+8 cm 粗粒式沥青混凝土+34 cm 抗裂嵌挤型水泥稳定碎石。在工程实施期间,对该道路的中面层进行了现场随机取样,并进行了统计和分析。
2.1 面层厚度控制分析
为深入分析3D 智能摊铺技术的施工效果,该文随机抽取样本点实测高程与设计高程并进行对比,随机样本点设计高程与实测高程统计分布情况如图1 所示。
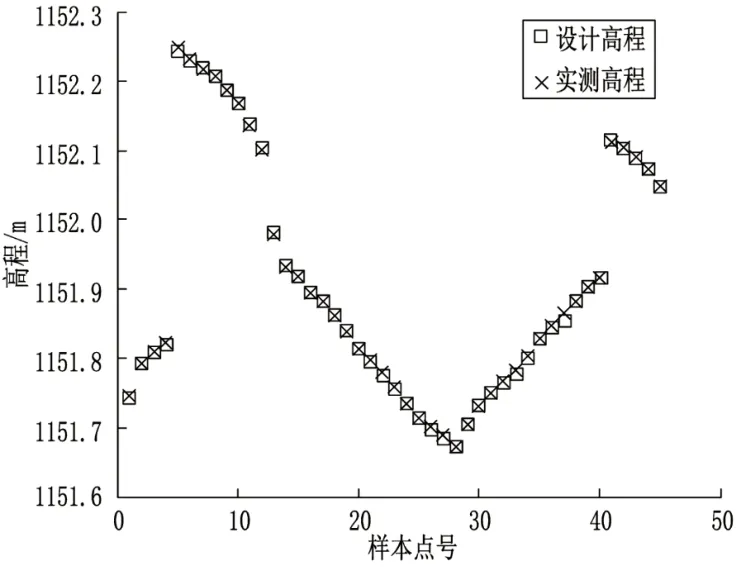
图1 随机样本点设计高程与实测高程统计分布
如图1 所示,该段的设计高程随着位置的变化而出现一定的波动,最大的变化范围在0.6 m 左右。由于设计高程的起伏,实际的摊铺精确度会受到一定影响。图1所示的测量高程值与设计高程的测量结果基本一致,为使测量高程与设计高程的差异更加清楚,方便对二者的高差进行计算和统计,绘制随机样本点实测高程与设计高程偏差量图,如图2 所示。图2 中的“正值”是指实际测量高程值比设计高程值相比较高,而“负值”是指实际测量的高程值比设计的高程值低。
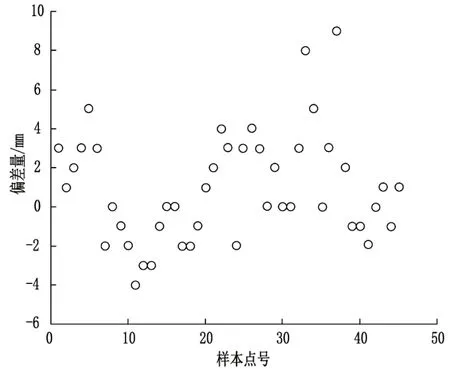
图2 随机样本点实测高程与设计高程偏差量
从图2 数据的统计分析可以看出,实测高程值与设计高程值最小绝对偏差为0.2 mm,最大绝对偏差为9 mm根据规范要求,次干路上的热掺杂料铺面的厚度误差应在8%或5 mm 以内。因此,经检验资料表明,中面层的误差在6.4 mm 以下为标准。从图中可以看出,超过6.4 mm 的数据有2 个,占全部检测数据数量的5%,合格率95%,说明3D 智能摊铺技术应用在工程中具有良好的施工控制效果。
实现8级泵站联合梯级调度,信息化采取联合体投标,委托中国航天科技集团第十二研究院设计、施工一体化总承包。自动化集成采用全国顶尖水利自动化品牌,并引进BIM设计,打破条块化,将水泵监控、水利调配和压力测控融合到一个系统,实行可视化模型操控。
2.2 技术应用效果分析
为分析3D 智能摊铺技术应用效果,对检测数据偏差量进行统计分析,如图3 所示。
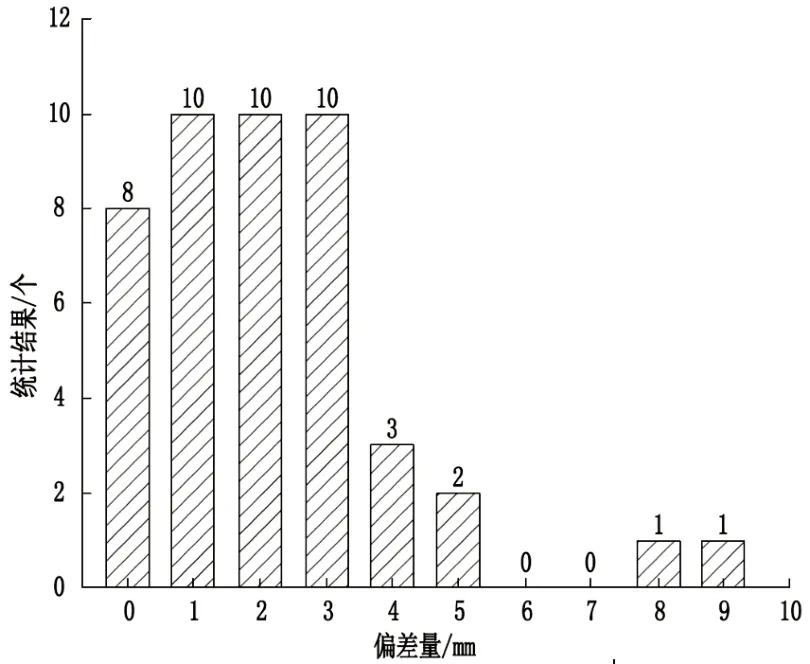
图3 检测数据偏差量统计图
从图3 可以看出:①绝大多数的偏差量分布在0~3 mm范围内;②当偏差量>4 mm 时,数据量显著减小;图4为检测数据偏差量的累积占比曲线,从图中可以看出,偏差值为≤3 mm 的数据量为85%,偏离值为4 mm 的数据量为91%,而符合标准要求的偏差为6 mm 的数据量为95%。
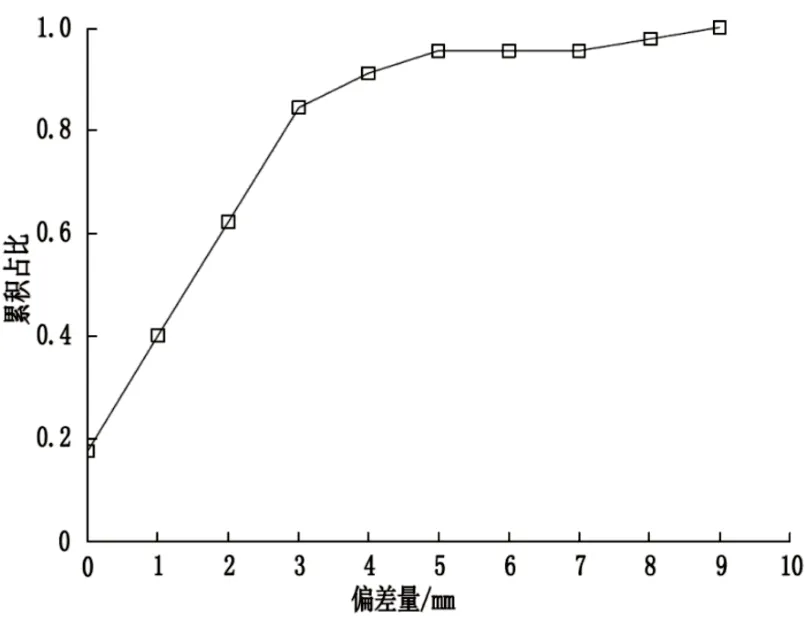
图4 检测数据偏差量累计占比曲线
检测数据标准差计算公式见式(1):

式中,N——自由度。经计算得出,检测数据的标准差σ=2.757 mm,平均值r=2.1 mm。
由公式计算可得,3D 智能摊铺技术应用在路面摊铺施工阶段,可以提高施工技术水平,有效解决由于振动、高温导致实际坡度与设计误差较大的问题,实现精准化施工,极大提高了摊铺质量。
3 3D 智能摊铺系统施工质量控制
对于传统摊铺施工技术来说,摊铺作业人员的技术水平、人工精度的控制以及机械自身的摊铺能力是决定工程质量的重要因素。
(1)采用高精密的测控技术取代手工操作,实现三维3D 智能摊铺,减少了人工工序和人为误差[4]。3D 智能摊铺技术的施工质量除受到摊铺机本身特性的影响外,还受3D 智能摊铺控制系统精度的影响。由专业人员进行安装和校验,基本上可以避免系统的设置错误,确保系统的控制精度。
(2)下层路基的填筑质量对智能摊铺技术的施工效果有很大的影响。如果下层路基的标高和平整度没有达到要求,则会造成实际摊铺厚度与设计厚度不一致,而摊铺沥青则会根据设计厚度进行摊铺,这就直接造成压实后的路面标高与设计值存在误差,影响摊铺质量[5-6]。
(3)3D 智能摊铺系统应用时应确保下层路基压实率达到要求,否则会导致摊铺设备碾压路面产生沉降以及路面摊铺的实际标高与设计标高存在误差。
(4)为了进一步提高3D 智能摊铺技术的施工质量,必须尽可能地提高设备的安装精度,减少系统误差,并对路基填筑质量进行严格的控制,降低外部因素对摊铺质量的影响。
4 3D 智能摊铺系统施工需重点注意事项
3D 智能摊铺技术是利用高精度智能全站仪,结合自动化控制和3D 数字化建模及无线通信的施工技术,立体控制摊铺作业的平面位置和高程精度。彻底改变了传统的手工作业方式,强化了施工过程的质量控制,既能改善工程质量,又能在减少投资成本的同时提高工程的综合效益。但是,在施工中应用3D 智能摊铺技术还需要注意几点,具体如下:
(1)3D 智能摊铺系统利用各种信号传送程序,将数据转变为系统可识别的标准格式的设计数据,从而实现整个系统的正常启动[7]。其中,激光发射器是通过发射激光信号向系统提供毫米级精度的定位坐标,如果激光发射机器和激光接收机器之间有很高的障碍物,会直接干扰信号传输,从而影响摊铺系统的施工精度。其中,障碍物与信号传输干扰因素包括施工周边的高层建筑、电线杆、城市道路两侧标牌等。
(2)激光发射器的工作距离为300~1 500 m,为减少激光发射器周围环境的干扰,需对激光发射器进行加密,并增加换站工作量[8]。但频繁换站或使用多个智能摊铺系统存在一定局限性,会使多个系统误差叠加导致施工摊铺精度较差,很难达到预期施工效果。
5 经济效益分析
与传统的施工技术相比,使用3D 智能摊铺技术可有效降低设备的采购成本及人工成本,且3D 智能摊铺施工技术的精度高,节省了摊铺材料的投入[9]。因此,不考虑后续维护费用,采用3D 智能摊铺技术铺筑的路面工程超过5.3 km 时,其节省的材料投入可弥补全部设备的费用。综合考虑经济、公路工程量等因素,提出了采用3D智能摊铺设备的方案。
6 结论
3D 智能摊铺施工技术将高精度的测量与定位设备用于沥青摊铺,减少了人工干预和准备工作,并使沥青摊铺的精度明显改善。通过对其技术原理、实验结果的分析,得到如下主要结论:
(1)3D 智能摊铺施工技术包括对GPS 卫星信号、GNSS 差分信号、激光高程信号进行处理,并按预先设置的设计参数对熨平板液压阀进行精确的控制,调节摊铺机熨平板的姿态,使摊铺作业智能化、无桩化。
(2)根据随机选取的代表路段施工测试摊铺效果,结果表明应用3D 智能摊铺技术节约了人工成本,且摊铺质量合格率大于95%,摊铺精度较高。
(3)由于道路施工条件比较复杂,3D 智能摊铺系统的信号传输可能受到不利影响。因此3D 智能摊铺技术是否能够可靠、稳定地用于路面摊铺,还需不断改进。
(4)为了提高3D 智能摊铺施工技术的施工质量,在能够解决系统自身的安装误差的前提下,还应对下层路基的填筑质量进行严格的控制,或采用其他高精度的碾压技术。
(5)采用3D 智能摊铺施工技术,会增加系统设备的采购成本、后期的维护成本,但另一方面因通过精确的系统控制,可以节省物料费用。经量本利模型分析,建议在公路工程量超过5.3 km 时,购置并应用3D 智能摊铺设备。
猜你喜欢
石材(2022年2期)2022-05-25 13:04:12
当代陕西(2020年23期)2021-01-07 09:24:44
学生天地(2020年6期)2020-08-25 09:10:50
数学年刊A辑(中文版)(2020年2期)2020-07-25 02:04:36
石家庄铁路职业技术学院学报(2017年4期)2017-05-25 13:26:41
系统医学(2016年8期)2016-02-20 02:55:08
筑路机械与施工机械化(2015年11期)2015-07-01 16:28:47
筑路机械与施工机械化(2015年11期)2015-07-01 16:28:35
全球定位系统(2015年4期)2015-02-28 12:38:13
浙江国土资源(2014年5期)2014-04-28 09:04:19