
大豆玉米带状复合种植全程机械化关键技术与装备*
2023-02-04 11:51齐彦栋金诚谦刘岗微杨腾祥
中国农机化学报 2023年1期
齐彦栋,金诚谦,刘岗微,杨腾祥
(农业农村部南京农业机械化研究所,南京市,210014)
0 引言
大豆玉米带状复合种植能够协调大豆、玉米相互争地的矛盾[1-3]。2011年被列为农业部农业轻简化实用技术,2019年遴选为国家大豆振兴计划重点推广技术,2020年中央一号文件指出“加大对玉米、大豆间作新农艺推广的支持力度”,2021年《“十四五”全国种植业发展规划》明确将大豆玉米带状复合种植列为东北、黄淮海等地区大豆扩面增产的主推技术,2022年中央一号文件指出黄淮海、西北、西南推广大豆玉米带状复合种植[4]。2022年,中国农业科学院发布了《大豆玉米带状复合种植机械化生产技术指导意见》[5],为各地农业生产部门提供参考。各省市也陆续发布针对各地区的玉米大豆带状复合种植指导意见与机具推荐目录,推动大豆玉米带状复合种植的发展推广。2022年全国16省市将推广玉米大豆带状复合种植1 033 khm2,到2025年,全国预计推广面积3 333 khm2[6],大豆玉米带状复合种植发展前景广阔。本文阐述大豆玉米带状复合种植全程机械化技术研究进展,介绍耕播、田间管理、收获的关键技术和现有装备,探究大豆玉米带状复合种植全程机械化发展方向。
1 大豆、玉米在我国种植发展现状
大豆是我国重要的粮食和油料作物,2021年我国大豆播种面积为8 400 khm2,产量为16 400 kt[7]。2020年我国大豆需求量达119 849.5 kt,目前我国大豆进口依赖严重,2020年我国大豆消费量中,进口大豆占比为83.7%,国产大豆占比仅为16.3%,对我国粮食安全造成较大的隐患[8]。我国自2019年开始实施国产大豆振兴计划,2022年启动国家大豆和油料产能提升工程,提高大豆产能。玉米是我国的主要粮食作物,2021年我国玉米播种面积达43 324.1 khm2,产量达272 552 kt,2021年我国玉米产量占粮食总产量的39.91%。大豆与玉米主产区相同,生长期重合,二者存在严重的争地现象。玉米单产高,大豆单产低,大豆种植经济效益较低,农民种植大豆积极性不高,导致我国大豆产业发展缓慢。
大豆玉米复合种植技术是保证玉米基本不减产、增加大豆产量的有效途径。该种植模式可以充分发挥大豆根瘤固氮作用,提高土壤肥力,同时充分利用作物边行优势,提高土地利用率,实现大豆玉米双高收益,有效保证粮油种植效能最大化,缓解我国粮油争地矛盾。
2 大豆玉米带状复合种植农艺技术对农机提出的要求
农艺方面,大豆玉米带状复合种植需要根据资源条件、种植熟制、水肥条件等选择适宜的品种,玉米选用高产、适宜密植和机械化收获的高产品种,大豆选择耐荫、耐密、抗倒品种。大豆玉米带状复合种植的群体产量主要取决于玉米的单产,为提高玉豆套作体系的总产量和总产值、确保经济效益,一般将大豆和玉米进行密植[9-13],具体播种时间需要根据当地气候条件、前茬作物收获时间和效益目标确定。
大豆玉米带状复合种植技术以“选配良种、扩间增光、缩株保密”为核心,以“减量一体化施肥、化控抗倒、绿色防控”配套[14],与农艺措施复杂而不统一的传统套种模式有明显的区别,但大豆和玉米两种作物共生时间上的差别带来了种植模式的差异,现有种植模式有“2(玉米)+3(大豆)”“2+4”“3+4”“4+4”“4+6”等模式,不同的模式需要播种、收获机械配置不同作业幅宽,对作业机械的通用性、可调整性提出了较高的要求;北方、黄淮、南方的土壤、前茬秸秆条件差异较大,种床创制技术有差异;扩间增光与缩株保密需要考虑什么样的株行距能够稳产、高产,也需要考虑什么样的株行距适合机械化作业;在农艺上为保证两种作物的正常生长,大豆玉米施肥用药要分开,在机械技术上需要考虑如何实现差异化精准施肥施药。
大豆玉米带状复合种植的全程机械化是指在大豆、玉米播种、植保、收获等生产全过程中实施机械化作业,节省人力资源、降低生产成本、提高产量。随着劳动力减少与土地流转进程加快,大豆玉米带状复合种植必须实现机械化。探究大豆玉米带状复合种植技术与装备对促进农业发展有重要的推动作用[2, 15]。现阶段已经攻克部分达到大豆玉米带状复合种植农艺要求的关键技术,研制出了合适的耕种管收作业机具,推动了大豆玉米带状复合种植的发展。农机农艺技术高度融合、研究出合理的机械作业工艺、研制出可靠高效的作业机具、实现高效与高产的统一仍然是现阶段主要研究方向。
3 耕播关键技术与装备
3.1 大豆玉米带状复合种植对耕播的具体要求
大豆玉米带状复合种植株距较小且要求严格,现有排种器株距难以精确调控,且高速播种时,漏种率较高,难以满足带状复合种植的要求。另外复合种植大豆植株行距小,免耕播种行间易拥堵,对种床的创制与播种机秸秆防堵技术有一定的要求;而玉米密植后对肥料的需求加大,目前的净作播种机排肥量不够,需要对肥箱和排肥机构改进。
3.2 耕播关键技术研究
3.2.1 耕整地关键技术
大豆玉米带状复合种植大豆、玉米同时播种,种床条件需要同时满足大豆、玉米要求。播种株行距要求严格,现有播种机排种器多以地轮驱动,为保证株距合格率,要求种床较为平整。采用保护性耕作技术可以减少种床受到风蚀、水蚀,提高土壤抗旱能力和肥力[16],可用于大豆玉米带状复合种植,我国主要采取的保护性耕作措施有留茬垄作少免耕、留茬覆盖少免耕、坡耕地免耕沟播、秸秆还田少免耕并进行适时深松作业[17]。张祥彩等[18]探究了滑动式开沟器刃口厚度、刃口曲线、入土隙角和入土角对种床土壤容重、土壤水稳团聚体、土壤扰动量和表层秸秆扰动量的影响,为创造适宜种床环境条件的滑动式开沟器的结构优化提供参考。周华等[19]设计了秸秆还田深松旋埋联合耕整地机,集土壤深松、破茬碎土、秸秆旋埋、平地等功能于一体,耕后地表平整度为1.0 cm,满足农艺要求。赵淑红等[20]采用离散元软件模拟深松铲铲尖在土壤中的运动,获得土壤颗粒运动轨迹的拟合曲线,将曲线优化作为铲柄外形曲线,试验表明,优化后的深松铲土壤扰动量小,耕作阻力小。
3.2.2 小株距精密播种技术
大豆玉米带状复合种植农艺要求大豆株距7~12 cm,玉米株距8~14 cm,需要适当增加排种器转速保证株距,而排种器转速的提高会导致排种质量不稳定。为提高排种器性能,王奇等[21]探究了指夹式玉米免耕精密播种机振动特性对排种性能的影响,为免耕播种机指夹式排种器性能的提高提供了参考。陈玉龙等[22]为满足大豆高速精密播种作业要求,设计了一种凸勺式排种器(图1),播种速度为6~12 km/h时的粒距合格率高于93%,漏播率低于3%,满足播种机高速精密作业的要求,但株距合格率有待进一步提高。基于GPS测速的电驱式精量播种机可以较好地实现高速精量播种,排种盘使用电机驱动,能够根据播种机前进速度实时调整转速,根据转速传感器反馈实现排种盘转速闭环控制,提高作业质量,试验表明,基于GPS测速的电驱式精量播种机播种粒距合格率和粒距变异系数均优于机械式播种机,更适合高速作业工况[23]。气力式排种器使用气流作用充种、清种或携种,对种子的大小和形状适应性较强,相比机械式排种器更容易实现高速、精密播种[24]。气流还可以用于辅助投种,王云霞等[25]设计了一种适用于气流辅助高速投种的精量播种机压种装置,配合压种轮与土壤双向挤压作用实现种子的精确定位,能够显著减少种子的落地弹跳,增加株距合格率。
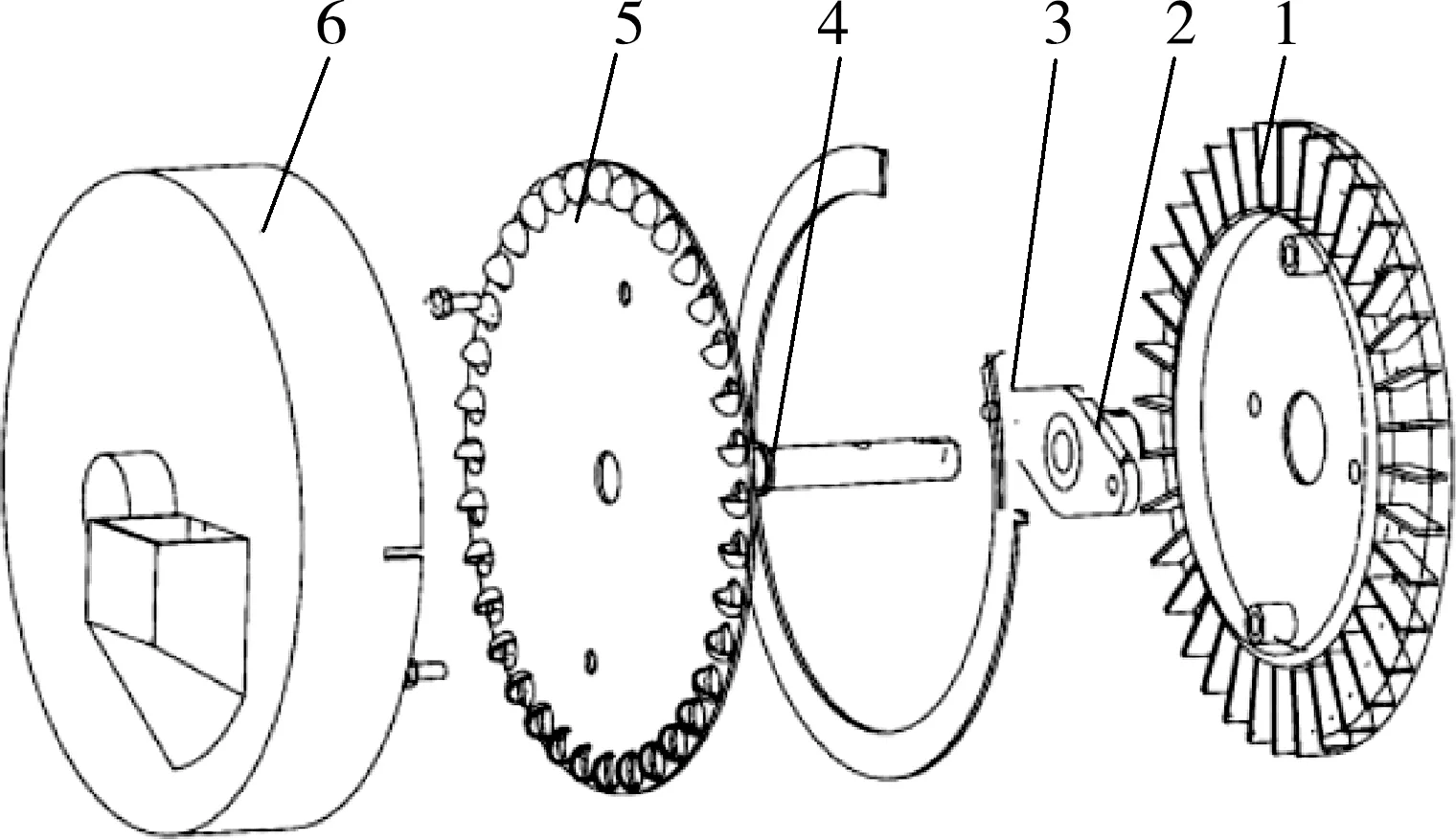
图1 凸勺式排种器结构简图
随着农业机械智能化的研究与应用,播种机机具逐步向智能化方向发展,播种测控技术的发展促进播种质量得到很大提升[26]。黄东岩等[27]设计了基于压电薄膜的播种机排种监测系统,纪超等[28]设计了基于反射式红外光电传感器的播种机排种检测系统,二者均可实现免耕精量播种机排种质量的实时监测。当检测装置识别到漏播时,及时进行补种可以显著提高播种粒距的一致性,赵淑红等[29]设计了玉米勺式排种器变速补种系统,使用光电传感器在出种口提前检测,漏播发生时由步进电机改变排种器转速,越过空种槽达到实时补种的目的,但在高速播种的工况下,补种效果不显著。吴南等[30]建立了补种机构的驱动模型,设计了补种控制算法,当检测到漏播时,计算补种籽粒与上一籽粒之间的距离,通过控制步进电机的转速和转角实现漏播补种,田间试验表明,该系统免耕播种合格率均值为98.72%,有效提高了播种质量。
3.2.3 大豆玉米播种分控技术
大豆、玉米同时播种,但株行距不同、施用化肥不同,需要分别控制大豆玉米的株行距、播种深度、施肥种类与施肥量。现有机具进行大豆玉米带状复合种植播种时存在播种机部件和参数调整困难、播种效果差、综合效益低的问题。任领等[31]结合整机驱动和仿形播种单体的优点,设计了大豆玉米带状复合种植专用精量播种机,可通过播种单体的控制手柄实现对大豆玉米复合播种株距、播深和施肥量的精确分控。根据大豆玉米带状复合种植的间作模式,播种机也分为“2+4”“4+4”等不同的大豆玉米播种单体的组合,播种时应按照实际需要选用不同的播种机具。
3.2.4 玉米大排量施肥技术
玉米施肥机需要采用大排量排肥技术,目前可以采用增加肥箱容积的方法,使用两个或多个排肥器给一行玉米施肥。张继成等[32]设计了基于增量式PID算法的多种固体肥精确施控系统,实现三种固体肥的适时快速响应和实时精量排出,为多排肥器的设计提供参考。张季琴等[33]设计了排肥单体独立控制的变量施肥控制系统,实现各行的独立作业,作业幅宽可调,提高了变量施肥机对田间复杂环境的适应能力,为施肥独立作业单体控制设计提供了参考。
3.2.5 秸秆防堵技术
大豆玉米带状复合种植大豆行距30 cm,玉米行距40 cm,大豆玉米行间距60 cm,与普通净作相比行距缩小25%~50%,播种作业时排种管更容易拥堵杂草、秸秆、根茬等,在黄淮海一年两熟夏播地区尤为严重。良好的防堵技术是实现免耕播种、提高生产效率的关键,现阶段播种机防堵主要采用切茬式、分秸式、破茬式、碎秸式、抛秸式五种防堵方法,但分别存在通用型差、可靠性不高等问题[34]。王韦韦等[35]设计了一种主动式秸秆移位防堵装置,使用旋转立式刀片将待播区地表秸秆移出,实现待播区地表平整无秸秆。姚文燕等[36]基于旋耕防堵理论设计了一种浅旋条带对行主动式防堵装置,使用旋耕刀将秸秆切碎、抛洒,试验表明,秸秆清洁率为91.85%,可以满足高速作业需求。顾峰玮等[37]提出“洁区播种”的思路,将待播区内地表的秸秆进行粉碎,并捡拾收集,经提升后向后端抛洒,苗床整理、施肥播种可以在相对清洁的土地上进行,随后被抛洒的秸秆均匀覆盖于播种后的地面上,满足全秸秆覆盖地免耕播种大豆玉米的需求。
3.2.6 均匀接行技术
大豆玉米带状复合种植对播种作业直线度要求较高,农业机械自动导航技术可用于播种机具的辅助驾驶,提高播种机直线行驶和交接行的精度,减轻机手的劳动强度[38],其关键技术包括定位测姿技术、路径规划与运动控制等,已经逐渐成为新的研究热点[39]。定位测姿技术包括基于RTK-GPS的位置测量方法、基于机器视觉的位置测量方法和基于多传感器的位置测量方法[40],现阶段多使用RTK-GPS、机器视觉和多传感器融合的方法进行测姿定位,以得到更好的测量结果。在路径规划与运动控制方面,王辉等[41]采用预瞄追踪辅助直线引导农机快速稳定跟踪规划路径,在颠簸不平的旱地路面直线路径跟踪误差绝对值的平均值为1 cm。白晓平等[42]对传统二轮车运动学模型建模方法进行改进,采用加入侧偏角的方法优化农机运动学建模过程,试验表明,优化模型设计的路径跟踪控制器对直线路径跟踪有一定的提升,对曲线跟踪精度有较大的提升。农业机械自动驾驶系统的执行机构主要包括电动方向盘与电控液压阀转向[43-44]。
3.3 现有耕播装备
大豆玉米带状复合种植耕整地模式与传统耕整地模式相近,传统耕整地机具可以满足大豆玉米带状复合种植的耕作要求。西北地区常用的机具有联合整地机、杆齿式深松机与全方位深松机,黄淮地区可以直接使用免耕播种机进行播种,但需要解决秸秆堵塞问题,通常是在机具开沟前增加拨草轮或者切茬刀来解决此类问题。对于普通耕整地模式,西北地区一般采用深松、旋耕、翻地、耙地等组合方式进行整地,主要机具有复式犁、螺旋形犁、心土混层犁、联合整地机、杆齿深松机、全方位整地机等耕整地机械,黄淮地区主要使用圆盘耙或者钉齿耙对前茬作物进行灭茬处理,西南和长江中下游地区通常使用旋耕机在播种前进行浅旋耕作。耕整地机具生产企业根据不同的作业要求组合多种作业部件,实现作业质量的提高。
针对不同的大豆玉米带状复合种植模式,各企业与科研院所设计制造的复式播种机已经投入使用。河北某公司生产的2BFYD-2/4型、2BFYDM-2/4型大豆玉米密植分控施肥播种机,分别适用于前茬秸秆较多的黄淮海地区和地表秸秆少、地面平整的东北、西北地区;河南某公司生产的大豆玉米带状复合免耕播种机系列包含“2+4模式”“4+4模式”“4+6模式”,作业速度可达8 km/h,株距可调,排肥量增加75~375 kg/hm2,作业效率可以达到8 hm2/天;黑龙江某公司生产的2BQYT-4/2型,2BQYT-3/2型一体化精量播种机,作业速度最大8 km/h,行距、株距可调,玉米大豆施肥分控,并具备排种施肥监控功能。
4 田间管理关键技术与装备
4.1 大豆玉米带状复合种植对田间管理的具体要求
大豆玉米带状复合种植田间管理主要包括杂草防除、病虫防治、化学控旺、水肥管理等。在杂草防除方面,播种前可以使用无人机或者喷杆喷雾机进行田间的全封闭除草。出苗后,由于玉米大豆分属单、双子叶作物,根据除草剂的除草机理,不能同期同田全覆盖除草,这是大豆玉米带状复合种植植保难题。另外病虫防治和化学控旺也需要分别根据大豆、玉米不同的生长阶段和实际生长情况选择相应的药剂独立喷施。
4.2 田间管理关键技术研究
4.2.1 双喷雾系统分带定向施药技术
大豆和玉米需要喷施的农药种类不同,因此需要使用相互独立的双喷雾系统对大豆玉米同时施药。佘鸿飞等[45]设计了用于棉花落叶催熟剂喷洒的双药液双管路喷雾机,并投入实际生产使用,提高了药液的使用效率降低了农药污染,可为分带定向施药结构设计提供参考。尚增强[46]针对大豆玉米带状复合种植的需要设计了小型电动自走式分带喷杆喷雾机(图2),该系统包括大豆药箱、玉米药箱、双隔膜泵、药液管路、多路控制阀和防飘移喷头等。喷雾过程中,大豆、玉米不同农药分别经隔膜泵加压后,进入对应管路系统,通过多路控制阀,经喷头雾化后沉积于靶标叶面,实现分带定向施药。为防止药液飘移产生药害,在不同苗带之间加装防飘移隔帘或隔板,结构简单,可以有效防止药液飘移。
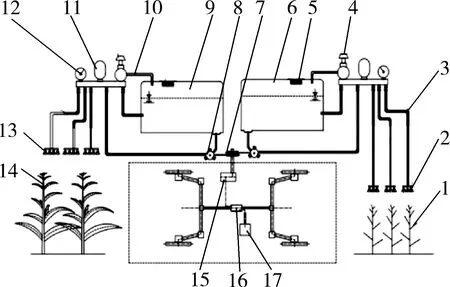
图2 双喷雾供药系统
4.2.2 自适应喷杆调节技术
带状复合种植不同种植模式的大豆、玉米行数与行距各不相同,对轮式植保机通用性要求较高,可将植保机喷杆设计为可调节部件,喷头挂架使用螺栓紧固,可以在需要时方便快速地调节喷头高度与间隔。大豆和玉米高度相差较大,施药时喷杆过高会导致对大豆的喷施效果较差,过低则可能碰撞玉米植株,Wang等[47]设计了基于生长期识别的棉花精准施药技术,通过机器学习识别系统对棉花生长期判断,根据生长期实现药液的精准喷洒操作,为喷雾机根据不同作物行与生长状况调整喷杆高度提供参考。徐晶[48]设计了基于作物冠层高度的喷杆高度调节与自适应系统,使用超声波传感器测量作物冠层高度,设计了喷杆位姿测量与控制系统,试验结果表明调节后实际高度与设定高度最大误差为14 mm。大田作业田间地表凹凸不平,大型喷杆喷雾机在作业过程中车辆发生倾斜时喷杆可能会与作物发生碰撞,影响喷药均匀性甚至发生安全事故,印祥等[49]设计的高地隙施药机喷杆自动调平系统,作业实时调整喷杆水平角度并使之保持在±1°以内,满足喷杆自动调平控制要求。
4.2.3 植保机轮距调节技术
针对不同行距下高地隙喷杆喷雾机田间行走困难的问题,窦玲静[50]设计了自走式喷雾机轮距可调式转向机构,该转向机构为液压缸驱动的空间传动机构,通过试验获得转向系统的主要性能参数,为高地隙植保机转向机构的设计提供了参考。季位文[51]对植保机底盘结构进行理论分析与优化设计,简化了轮距调节装置,增加了轮距调节的精度,为高地隙植保机可调节底盘的设计优化提供了参考。
4.2.4 防飘移喷雾技术
大豆玉米带状复合种植对药液偏移较为敏感,除了加装物理隔离帘,对防飘移喷雾技术的研究同样重要。在大田情况下进行农药喷施,自然风是影响喷施效果的主要因素,苑进等[52]考虑自然风影响,对气辅式喷雾雾滴飘移特性进行建模,为喷雾主动控制系统提供了控制模型和决策依据。静电喷雾技术可以减少大田喷雾作业的农药稀释用水量,解决传统喷头药液雾滴分布不均和叶片背面沉积量不足的问题,马旭等[53]将静电喷雾喷头与喷杆喷雾技术相结合,通过试验得到最优的喷雾参数,为静电喷雾技术在大型喷杆喷雾机上的应用提供参考。对靶施药技术可以进一步减少农药的使用量,采用基于LiDAR和机器视觉的作物识别方法[54-55],通过控制施药部件,实现精确对靶施药,为精准施药提供了新思路。汪闪闪[56]通过流体仿真方法对雾化喷头的流道结构进行设计,为气助式变幅喷头的设计提供了参考。植保无人机喷施的雾滴除受到自然风影响之外还受到自身旋翼风的影响,为提高植保无人机的作业质量,刘道奇等[57]通过试验建立了植保无人机飞行速度、飞行高度、喷雾压力和喷雾均匀性关系模型,对多旋翼无人植保机的作业参数进行了优化。喷嘴是植保喷雾机上的关键部件,何勇等[58]在总结各类植保无人机常用喷嘴的原理、特点以及应用场合的基础上,提出了喷嘴性能评价指标,分析当前植保无人机在发展中需要解决的问题并提出建议,为植保无人机喷嘴的发展提供思路。
4.3 现有田间管理装备
针对不同复合种植地区不同种植模式,可采用不同的植保机具。3WPZ-1200型高地隙分带喷杆喷雾机适合于较大地块“2+5”“2+6”模式的施药,药箱容积1 200 L,作业幅宽10 m,作业速度最大8 km/h。3WPZ-200型小型摆杆式分带喷杆喷雾机可实现小地块的分带植保,药箱容积200 L,作业幅宽2 m。变幅植保无人机通过改变喷头角度实现变喷幅施药,可以单独对玉米行或者大豆行进行植保作业,适应多种种植模式。
5 收获关键技术与装备
5.1 大豆玉米带状复合种植对收获的具体要求
由于大豆玉米成熟顺序不同,收获模式分为异机分时间段收获、异机同时间段一前一后收获、异机同时间段跨带收获和同机同时间段收获,其中异机分时间段收获包括先收玉米和先收大豆两种作业模式,同机同时间段收获包括大豆玉米青贮收获、同一机体更换割台收获籽粒、大豆籽粒玉米果穗同时收获、大豆籽粒玉米籽粒同时收获。由于大豆在收获期易炸荚,为减少损失,收获时应考虑优先收获大豆,在分时间段收获时应严格控制收获机械机身宽度及割台幅宽,减少对未收作物的碰撞。先收作物需要根据种植模式的不同选用相应幅宽的收割机收获,以免对未收作物造成减产。同时间段一前一后收获对幅宽要求不高,可以使用现有收割机,但可能由于种植带较窄造成收割机割幅不满,机具利用率较低。
5.2 收获关键技术研究
5.2.1 密植玉米低损摘穗技术
玉米摘穗收获过程中存在籽粒损失高、破碎率高、果穗啃伤严重的问题,为提高玉米果穗收获机的收获质量,程修沛等[59]设计了上拉茎掰穗机构,陈美舟等[60]设计了仿生手掰穗式摘穗机构,有效避免了果穗的损伤,为低损伤玉米收获提供参考。耿端阳等[61]设计了间隙定位加持输送装置,解决了立辊式玉米收获机茎秆输送装置堵塞的问题,提高了立辊式玉米收获机割台的稳定性。
5.2.2 玉米低损低破碎脱粒技术
在玉米籽粒联合收割机方面,玉米籽粒收获一次性完成果穗摘取、脱粒清选等工序,收获效率高,成本低,但是容易导致籽粒损伤破皮、籽粒损失等问题。玉米低损低破碎脱粒技术是解决玉米脱粒过程中的籽粒损伤与损失的关键技术。耿端阳等[62]设计了横轴流式玉米柔性脱粒滚筒,采用柔性钉齿和弹性短纹杆组成的柔性脱粒滚筒可以减小脱粒元件与果穗之间的刚性冲击,从而有效降低脱粒过程中的未脱净率,降低籽粒损伤。王镇东等[63]设计了一种变径脱粒滚筒,将滚筒前端直径渐变增大,后端与脱粒分离段等径,减少了脱粒元件与果穗之间的直接接触,使果穗之间的接触揉搓作用更强,降低了籽粒的破碎。为降低籽粒清选损失率和含杂率,程超等[64]建立籽粒含杂率和损失率的回归模型并进行参数优化,得到玉米籽粒收获机清选作业参数较优水平区间为风机转速800~1 000 r/min,振动频率6~8 Hz,上清选筛筛孔开度15~25 mm。王立军等[65-66]对清选筛筛体结构和清选气流场进行了优化,得到最佳的筛孔长度21.68 mm,筛孔高度10.86 mm,筛孔纵向间距55.04 mm,此时振动筛的筛分效率达到89.91%,籽粒清洁率达到97.28%,当清选装置入风口气流速度16 m/s,气流角25°,阶梯高度8.36 mm,振动频率4.45 Hz时,清洁率可提高到99.16%。
5.2.3 大豆低损割台技术
由于大豆结荚低,且易炸荚,研究大豆联合收获机割台仿形技术具有重要意义。Ni等[67]研究分析了土壤与收获机仿形机构的相互作用机理,建立了仿形机构受力与土壤下陷关系模型及角度传感器检测角度与仿形机构转角的关系模型,设计了割台高度自适应调节系统,试验结果表明,割茬平均高度与设定值的相对误差小于2 mm,实现了割台对地仿形功能。金诚谦等[68]采用MBD-DEM耦合的方法设计了一种主—副板压紧式割台仿形机构,提高了仿形机构对田间地形变化感知的灵敏度,为联合收获机割台的仿形系统设计提供了参考。另外,使用柔性拨禾板可以有效降低拨禾轮对大豆植株的打击,匀流输送割台可以解决茎秆在割台上的拥堵问题[69],降低大豆炸荚、飞溅等割台损失。
5.2.4 大豆低破碎柔性脱粒技术与高效清选技术
我国的大豆机械收获相较于小麦水稻等作物存在破碎、含杂及损失较多的问题。针对以上问题,金诚谦等[70]通过试验探究了不同脱粒滚筒结构形式对大豆机收质量的影响,探索了不同含水率下最佳的脱粒参数匹配,为谷物收获机滚筒设计提供参考。钱震杰等[71]通过研究柔性脱粒齿杆与谷物含摩擦打击动力学,为柔性脱粒齿杆设计提供理论基础。刘鹏等[72]通过试验对比常规鱼鳞筛、加长鱼鳞筛、线性鱼眼筛、错位鱼眼筛、贝壳筛、网筛、圆孔筛、六棱孔筛、鱼鳞尾筛、栅格尾筛分别作为上筛、下筛和尾筛的不同组合形式对清选效果的影响,为大豆联合收获机清选筛的研发提供经验。金诚谦等[73]进行了大豆联合收获机整机作业参数的试验优化,通过优化试验得出大豆联合收获机的最佳作业参数组合为前进速度6 km/h、脱粒滚筒转速450 r/min、脱粒段脱粒间隙25 mm、分离段脱粒间隙20 mm、导流板角度26°、风机转速1 260 r/min、分风板角度11.5°、上筛前部开度19 mm、上筛后部开度11 mm,此时损失率为0.24%,破碎率为0.90%,含杂率为0.14%。
5.2.5 大豆低破碎籽粒输送技术
联合收获机螺旋输送器对大豆籽粒有搓擦挤压作用,造成了大豆籽粒破碎率高的问题,郭飞扬等[74]设计了大豆联合收获机气力卸粮装置,有效解决了卸粮过程中螺旋输送器对大豆造成挤压损伤的问题,可以满足大豆联合收获机的卸粮要求。随后对叶轮转速、卸粮软管内径、风机转速为因素,以破碎率、卸粮效率为指标进行响应面试验,得到最优的气力卸粮工作参数为叶轮转速15 r/min,风机转速3 166 r/min,软管内径100 mm,此时破碎率为1.49%,卸粮效率为1.3 L/s,降低了卸粮过程对大豆籽粒的损伤。
5.2.6 大豆收获质量在线检测技术
联合收获机作业质量在线检测可以为收获部件的参数调整提供反馈,但现阶段大豆联合收割机作业质量在线检测手段缺乏。陈满等[75]以联合收获机收获的大豆样本为研究对象,建立基于高光谱的大豆含杂率反演模型,该模型具有较强的拟合效果和预测能力,为大豆机械化作业含杂率的在线快速检测提供了新途径。陈满等[76]提出了基于机器视觉的谷物联合收获机在线破碎率、含杂率的检测方法,实现了大豆机械化收获质量在线可视化检测与报警,为大豆联合收获机的参数在线监测与自适应控制策略提供技术支持。
5.3 现有收获装备
针对大豆先收的收获模式,农业农村部南京农业机械化研究所和企业联合研制了4LZ-1.5、4LZ-2.0型大豆联合收获机,有效割幅1.5 m、2 m,适合带状复合种植的窄行大豆收割。针对玉米先收的作业模式,张敏[77]、李景斌[78]分别设计了高地隙玉米收获机,加高收获机底盘,割台分布在左右两侧,可以跨大豆带收获玉米,而不影响大豆作物。异机同步收获可以使用当地成熟的窄行收获机具进行。
6 展望
大豆玉米带状复合种植实现了玉米基本不减产的情况下增收一季大豆,提高了农民的收入水平,推动了大豆玉米的协调发展。加强大豆玉米带状复合种植农艺农机基础研究,探索不同地区农艺农机融合的技术模式,形成全程机械化方案,推广有利于机械化作业规范的种植模式,提高自主创新能力和技术储备水平,是实现大豆玉米带状复合种植高效生产的必然选择。
1) 加强理论研究,促进农机农艺进一步融合。在农艺方面,高产与宜机化作业综合考虑,制定相应的行距、株距、行数比例、带宽、带间距等农艺规范;在农机方面需要进一步研发适应大豆玉米带状复合种植农艺要求的装备,提高机具通过性与作业性能,实现耕、种、管、收全程机械化作业。
2) 加强装备创新,研发大豆、玉米一体化作业机具。现阶段大豆玉米带状复合种植的专用机具较少,机械装备大多基于已有的装备改装而来,虽然可以达到作业要求,但还有较大的改进空间。应依据大豆玉米带状复合种植特点,开展专用机具研发,突破联合播种、植保、收获关键技术与装备,研发一体化播种机、植保机与收获机,实现大豆、玉米同步播种、植保与收获作业。
3) 提高机具智能化水平,提升机具适应性。在大豆、玉米带状复合种植模式下,导航与辅助驾驶技术、对行技术、仿形技术、作业质量检测技术等智能化技术,可以提升作业机具对环境与种植模式的适应性,提升作业质量,提高作业效率。
猜你喜欢
中国农村科技(2021年12期)2021-12-28
今日农业(2021年17期)2021-11-26
今日农业(2020年22期)2020-12-14
今日农业(2020年18期)2020-10-27
江苏农机化(2020年5期)2020-10-26
湖北农机化(2020年4期)2020-07-24
———2020 款中农博远玉米收获机值得期待
河北农机(2020年1期)2020-01-11
新农业(2017年2期)2017-11-06
浙江大学学报(工学版)(2016年9期)2016-06-05
学习月刊(2015年10期)2015-07-09
