基于SLAM与RFID的博物馆藏品智能盘点方法
2023-02-03 08:50刘学平张晶阳
制造业自动化 2023年1期
刘学平,张晶阳
(清华大学 深圳国际研究生院,深圳 518055)
0 引言
博物馆是历史与文化传承的重要公共场所,其文物保存与展示、大众教育、艺术交流等功能愈发突出[1]。近年来,与日俱增的藏品种类和数量,依赖于人力和纸媒材料的藏品管理模式,都为博物馆藏品的日常管理与盘点带来严峻的挑战[2]。同时盘点等环节中的藏品挪动、纸质标签的粘贴替换等也严重威胁着藏品本体,博物馆亟待引入高效而智能的藏品盘点手段。
藏品智能盘点包括博物馆室内地图的构建和藏品的定位与智能查找两部分。现有技术中,同步定位与地图绘制技术(Simultaneous Localization and Mapping,SLAM)是室内环境下替代GPS与北斗系统的地图绘制方法。未知室内环境下,机器人利用SLAM技术可完成自身位姿估计,环境观测,以及室内地图的增量式构建[3],故SLAM可用于绘制博物馆的室内地图。另一方面,射频识别(Radio Frequency Identification,RFID)作为一种非接触式的通讯识别手段,具有全球编码唯一、识别速度快、信息读写便捷等优势[4],因而可用于藏品识别定位与智能查找。两种技术的结合,也为博物馆藏品智能盘点提供了解决方案。
同时,国内外也积累了很多RFID和SLAM技术的相关应用范例。姚一青将RFID管理手持机和门禁系统引入复旦大学博物馆CMS系统,以非接触的方式提升了藏品管理效率[5]。陈能成等设计了基于RFID与GIS的博物馆信息管理系统,提出了模块化的藏品信息综合管理方案[6]。Google推出的Trekker和Cartographer机器人,可在室内SLAM基础上,对地图中的位置点进行人为标注与记录[7]。张颖超等人提出了一种基于FastSLAM的RFID定位模型,并将RFID作为地标,可综合实现机器人位姿估计和RFID定位[8]。
本文进一步融合应用RFID与SLAM技术,提出了一种基于博物馆藏品布局可视化的藏品盘点方案,在获取博物馆室内环境布局和藏品信息化识别定位的基础上,利用机器人系统完成智能盘点,以提升博物馆藏品盘点效率和智能化水平。
1 RFID技术与Hector_SLAM算法
1.1 RFID技术概述
RFID技术是一种利用射频识别信号空间耦合实现信息交换与目标识别的通信技术[9],其基本系统组成包括电子标签(Tag)、读写器(Reader)和信息终端[10]。系统工作时,无源标签(Passive Tag)进入读写器磁场范围后,内置耦合电路产生感应电流提供能量将标签信息发送给读写器;有源标签(Active Tag)主动向外发送信号并将信息传递给信号范围内的读写器。收到读写器信号后,信息终端可识别“指纹”编码,进行信息处理。而根据工作频段的不同,RFID技术也有不同的通信机制和用途。现有用于RFID定位的RSSI(接收信号强度法)等方法对RFID信号处理设备的精度和布置都有较高要求,且系统相对独立,与其他技术的应用关联性较小。
1.2 Hector_SLAM算法分析
本方法中选用了目前主流SLAM技术中应用较多的Hector_SLAM算法。
精确的地图是室内环境可视化的关键,而以高更新频率和高分辨率激光雷达为数据来源的Hector_SLAM就是一种常用的室内地图构建算法。相较基于RBPF的Gmapping算法[11],Hector_SLAM不需要里程计信息便可以通过扫描匹配的方式实现位姿估计和室内地图增量绘制。同时,该算法采用栅格地图作为地图表达形式,创建和更新维护简便,也适用于机器人的导航避障[12]。
SLAM过程中,点云数据的扫描匹配和最优位姿的搜索是基于Gauss-Newton迭代梯度下降的方式进行的,迭代公式如式(1)、式(2)所示:

计算过程中,用一阶泰勒展开式对上式进行展开,得:

取H为黑塞矩阵,令τj-1=∈,并对Δτ求偏导后求解,有:

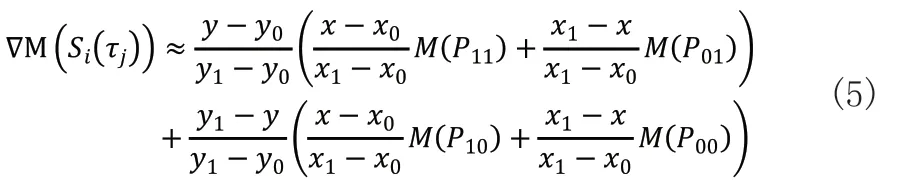
而对于每一帧的扫描数据,Hector_SLAM采用了双线性插值的方法以避免栅格地图的离散性带来的计算限制,栅格Pm的占用值M(Pm)的梯度估计用邻近的四个栅格点来进行:
2 ROS系统架构与藏品定位盘点方法
使用Hector_SALM算法绘制室内环境地图,可得到以机器人初始位姿为原点的世界坐标系[13],藏品及与其绑定的电子标签也位于此世界坐标系中,获取代表藏品的电子标签的位置坐标,即可获取藏品的室内布局情况,进而可以通过ROS系统控制底盘移动,完成智能巡检与盘点。
2.1 软硬件系统架构
藏品智能盘点是通过移动机器人平台进行的。硬件层面,Stm32驱动板与麦克纳姆轮全向移动底盘作为运动功能下位机,底盘上搭载的树莓派3B+作为系统上位机,PC端用于远程可视化与人机交互,激光雷达RPLIDAR A1M8与超高频RFID读写器R2000 UHF900M作为系统信息前端,各部分间通过USB进行通信,系统由12V锂电池供电。软件与系统层面,PC端系统为Ubuntu 16.04 LTS,树莓派3B+系统为Ubuntu 16.04 Mate,ROS版本为Kinetic Kame,SLAM算法为Hector_SLAM。
ROS是一种基于分布式架构的机器人系统,其运行依赖于不同话题、节点与服务的调用与通信。本方法中,为了实现底盘移动、SLAM地图构建、RFID扫描识别、电子标签定位计算,以综合完成智能盘点任务,采用的软硬件系统综合架构如图1所示。

图1 系统软硬件综合架构
具体而言,系统工作时Hector_SLAM订阅RPLIDAR发布的/scan话题获取激光雷达深度数据,完成博物馆室内环境SLAM建图,为系统提供地图服务。RFID扫描装置成功识别电子标签后调用地图服务和底盘的里程计/odometry话题信息,通过计算完成RFID定位并记录。执行盘点任务时,ROS系统利用amcl根据激光雷达数据实现自身位姿估计,Move_base完成路径规划和动态避障,控制移动底盘向目标藏品移动,完成盘点。底盘在SLAM建图、RFID电子标签扫描定位及执行盘点任务的移动过程中,都会根据电机编码数据和imu数据计算里程信息并以话题/odometry发布。
2.2 RFID电子标签定位方法
巡检机器人系统通过SLAM算法可以得到包含建筑结构等在内的博物馆室内布局地图,而藏品是根据博物馆的具体规划排布的,需要对其进行定位才能让机器人系统获取其室内排布情况。本方案中用电子标签代替纸质标签进行藏品信息维护,并将其附着或靠近对应的藏品作为藏品信息化识别标识。以机器人为载体,在SLAM所得地图中,利用RFID读写终端扫描电子标签,并在此过程中记录机器人系统位置信息,再根据扫描装置与机器人的相对位置关系,进行坐标系转换和定位计算,即可完成RFID定位,获取博物馆藏品布局地图。
具体而言,在PC端远程控制下,移动机器人平台先通过自身移动和激光雷达深度数据完成室内环境地图SLAM,获取室内地图,然后ROS系统调用RFID扫描装置并遍历地图以扫描全部与藏品绑定的电子标签。在此过程中,扫描终端首次识别某一电子标签位置时(记j=1),调用并记录机器人base_link在世界坐标中的位姿,在首次失去某电子标签信号时(记j=2)再次记录,并在机器人的移动中重复三次(记i=1,2,3)上述过程,所得坐标记为
在如图2所示的坐标转换关系中,设机器人坐标系base_link下UHF的位置坐标为(xUHF,yUHF),则可知UHF此时世界坐标系坐标为:

图2 系统坐标系转换关系

RFID定位采用三点定位的方法,即通过能够扫描到RFID信息的三个UHF位置点(在以RFID为中心的可扫描区域内)确定中心电子标签位置,如图3所示。
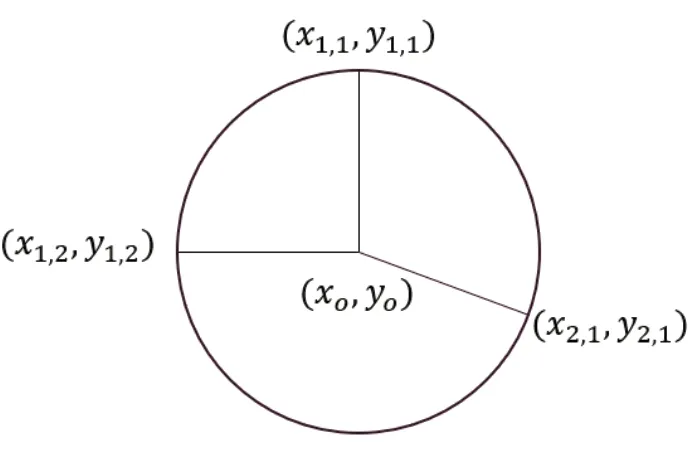
图3 电子标签三点定位法
计算过程中,分别取(xi,1,yi,1),(xi,2,yi,2)与点(xk,1,yk,1)或(xk,2,yk,2)计算圆心坐标,其中k=1,2,3且k≠i。令圆的方程为:

以其中一组参数为例,带入以下行列式即可求解参数a,b,c。
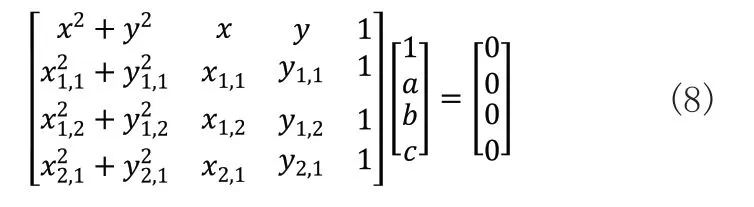
圆心坐标为:

利用上述方法,可求得12个圆心坐标结果,为了减小定位的系统误差,取其算术平均值作为世界坐标系下RFID电子标签定位结果并在系统中进行记录,定位记录的电子标签位置坐标为
3 RFID定位与智能盘点方法验证
为了检验本方法的有效性,本文以普通室内环境模拟了博物馆室内环境进行了验证实验,将电子标签随机放置于室内环境中,用以模拟博物馆中分散展览或存放的藏品。装配了麦克纳姆轮的四轮全向移动底盘搭载树莓派,激光雷达等硬件,在PC端远程控制下,移动过程中扫描室内环境,利用SLAM模块构建室内环境地图,然后基于上述步骤对RFID电子标签进行位置坐标计算,得出计算结果后利用RVIZ在地图中进行还原和标注。
同时,在移动机器人的世界坐标系下对室内环境中标签放置的坐标位置进行测量,借助RVIZ的publish point工具寻找电子标签实际位置在地图中的对应点,并进行标注。其中部分标签实际位置与定位位置的标记与对比结果如图4所示。
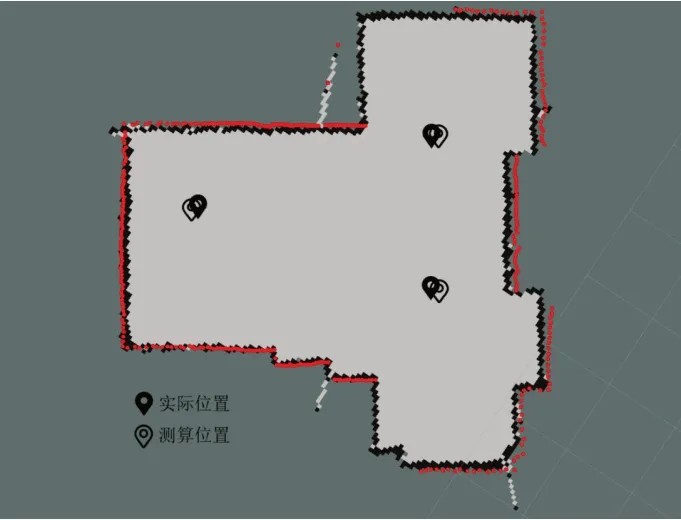
图4 SLAM地图中定位结果与实际位置对比
如图4所示,Hector_SLAM算法可较为精确地构建出室内环境地图,所绘地图边界相对完整清晰,在有多个角落的室内环境中也有较好环境特征测绘能力。同时,本文所述藏品地图构建方法中,经RVIZ可视化和位置点还原与对比,可知藏品电子标签实际位置与定位测算位置偏差较小,经计算,定位的绝对误差Ep≤0.1m,电子标签定位准确性较好。
实验中,对特定电子标签代表的“藏品”盘点时,移动机器人接收PC端指令,读取系统藏品布局地图记录的目标藏品位置坐标,完成路径规划并控制底盘移动。移动过程中,底盘依靠激光雷达数据进行动态避障和路径调整,直至完成电子标签的识别和信息读写,完成盘点任务。
综上所述,利用该方法可有效构建博物馆室内藏品布局地图,并可以用机器人代替人工实现藏品智能盘点,有效提升了博物馆藏品盘点的智能化水平和盘点效率。
4 结语
为了实现博物馆藏品的智能化盘点,本文提出了基于SLAM与RFID的博物馆藏品智能盘点方法:利用ROS系统,在使用SLAM技术构建的博物馆室内布局地图中,根据RFID扫描信息完成藏品RFID电子标签定位,从而获得博物馆的藏品布局,供机器人调用完成盘点任务。验证实验中,电子标签定位与其实际位置的距离偏差≤0.1m,误差较小,盘点任务能可高效完成。结果表明,本文方法切实有效,可综合提升博物馆藏品盘点的智能化水平和工作效率。
猜你喜欢
河北画报(2021年2期)2021-05-25
动漫星空(2020年10期)2020-10-29
动漫星空(2020年2期)2020-10-10
中外文摘(2020年8期)2020-05-05
现代园艺(2018年2期)2018-03-15
现代园艺(2017年21期)2018-01-03
中国交通信息化(2017年8期)2017-06-06
橡胶科技(2016年5期)2016-02-25
智能系统学报(2015年4期)2015-12-27
中国交通信息化(2015年11期)2015-06-06