
基于无人机的雪山垃圾回收系统的设计与验证*
2023-02-02 03:51范东汉史昕怡毛元赓陈逸飞
科技与创新 2023年2期
范东汉,史昕怡,毛元赓,陈逸飞,高 坚
(中国计量大学机电工程学院,浙江 杭州 310002)
本项目的核心任务在于实现对该自动拾取投放装置的设计、测试与验证。实现了对目标物的自动识别抓取,通过无人机飞跃障碍物抵达投放区域,机械臂接收投放指令,将所携带的目标物放置到投放区域[1]。
1 模型直升机的选择
机型为ALⅠGN-700-X电动模型直升机。动力搭配的具体情况如下:电池为格氏12S 50.4 V 5 500 mAh,马达为850MX电机、490KV值,电调为好盈铂金200 A电调。
升力配比的具体情况如表1所示。
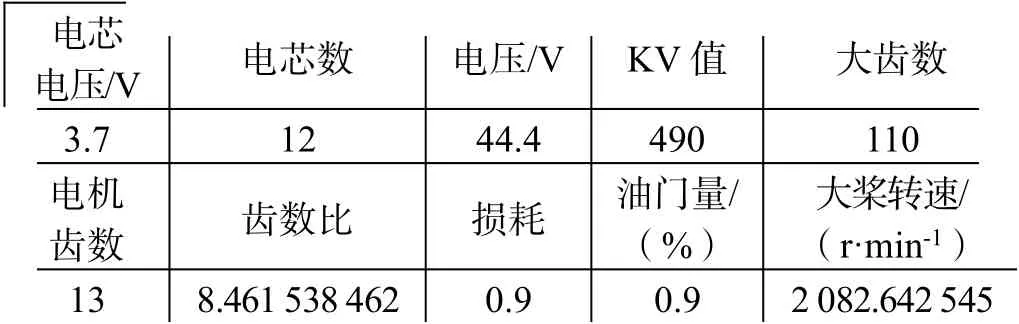
表1 升力配比
模型直升机的动力计算公式:主旋翼转速=电压×KV值÷齿数比×损耗×油门量。
所选用模型直升机的基本参数具体情况如表2所示。
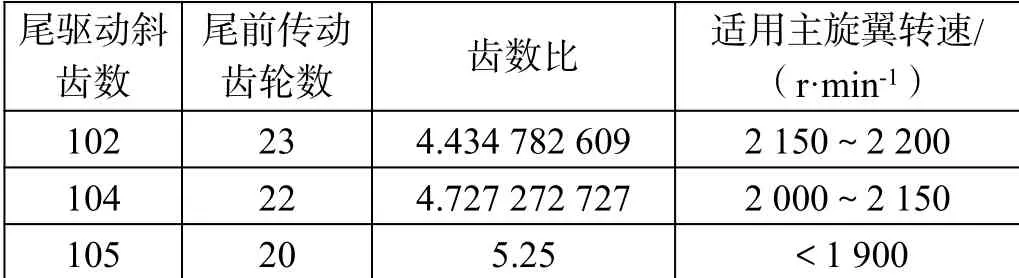
表2 所选用模型直升机的基本参数
根据大桨转速以及直升机搭配机械臂时因系统质量上升的扭矩,最终选用4.43齿数比。
2 机载平台机械结构设计
2.1 类直升机式脚架结构设计
机械臂脚架参考直升机以及常用科研多旋翼的设计,选用矩形框架式地面接触结构,矩形易变形特性的接触折点用碳纤维板加固。机载平台三维设计图如图1所示,实物图如图2所示。
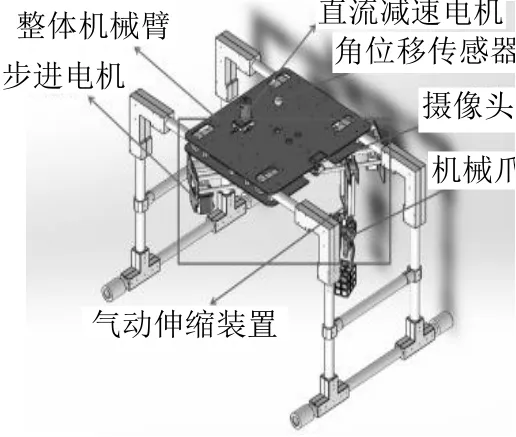
图1 机载平台三维设计图

图2 实物图
2.2 抓取投放装置设计
机械臂运行方式的设计采用角度-距离极坐标运行方式,机械臂的伸缩利用气动单行程伸缩装置,机械爪的张合控制通过利用舵机与球头连杆结合实现,抓取则通过回退型气动伸缩机械爪来实现。
根据正六面体和球体来模仿垃圾进行爪条抓取弧形以及点位的设计与改进,并通过实物制作来测试所设计的爪条抓取效果。部分改进机械爪条的图纸如图3所示。
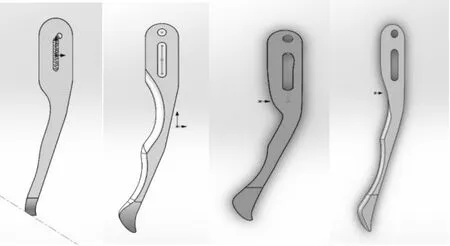
图3 部分改进机械爪条的图纸
2.3 直线运动模块设计
直线运动模块初步结构实物展示如图4所示。
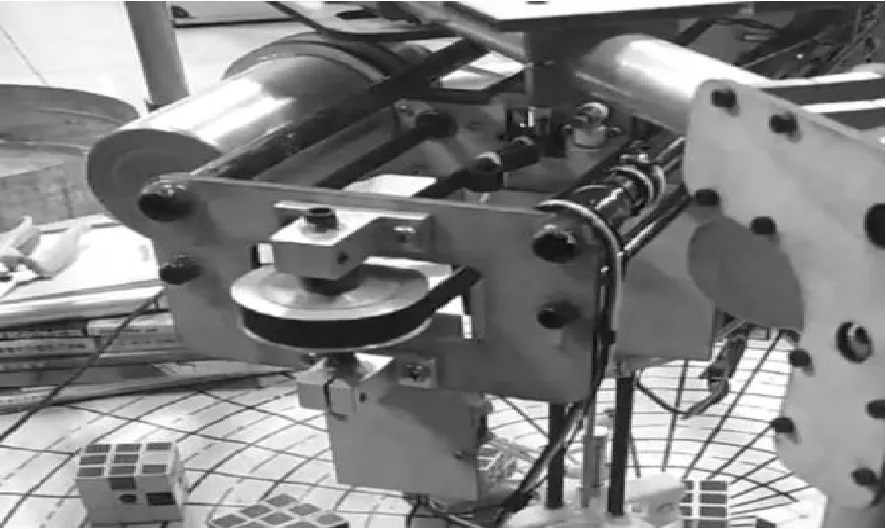
图4 直线运动模块的初步结构
2.4 气动抓取装置设计
搭配气动的大推力伸缩机构,设计了相应的弹性回退型机械爪,该系统可在垃圾密集分布时无视周边垃圾的卡位进行无障碍抓取。机械爪的三维设计图如图5所示,机械爪的实物图如图6所示。
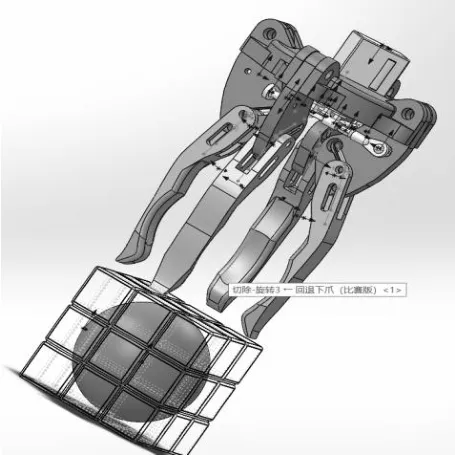
图5 机械爪的三维设计图

图6 机械爪的实物图
3 图像处理方案
采用单摄像头方案,图像去畸变处理结果如图7所示。
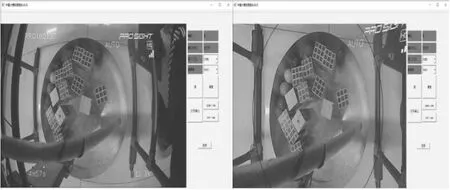
图7 畸变处理前后对比图像
4 无线图传模块
图传型号为PRO-SⅠGHT高清数字图传。选取该型号的具体原因:①数字图传采用加密传输方式,抗干扰能力较强;②图像传输质量高,分辨率达到720P;③该型号图传传输稳定且图像延迟低于0.02 s。
5 闭环式检测反馈设计
闭环检测反馈过程如图8所示。直角坐标系-极坐标系的转化程序处理如图9所示。

图8 闭环反馈检测
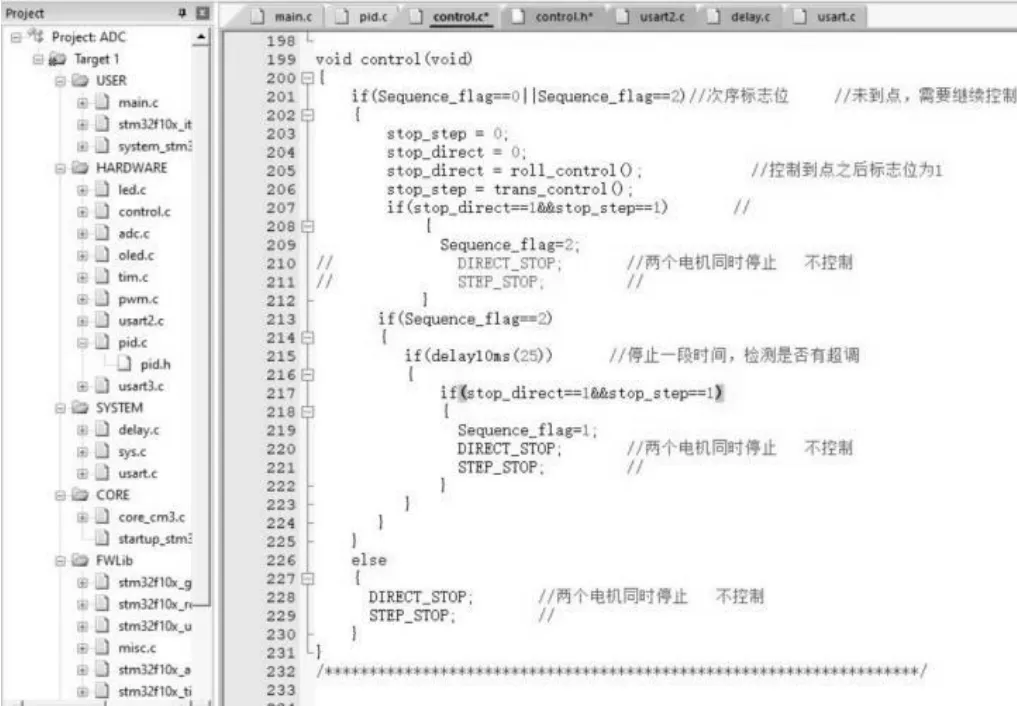
图9 程序处理
在颜色识别方面,将颜色分选表中的灰度值两两相减,取绝对值,选出最小值,将最小值除以2作为误差标准。在图像预处理结束后将阈值作为分辨物体和背景的标准。然后将绝对值与误差标准相比较,如果满足绝对值小于误差标准,则这个物体的颜色就是该绝对值所对应的颜色[2]。标准灰度值如图10所示。
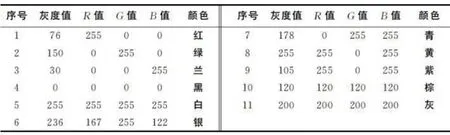
图10 标准灰度值
6 无人机验证
设置障碍物以模拟雪山复杂地形,无人机飞行至目标所在区对目标物进行识别与抓取,待抓取成功后无人机跨越障碍物返回至目标回收区,即完成测试。整体结构展示与外场测试如图11所示。

图11 整体结构展示与外场测试
无人机携带机载平台飞行约670架次,单次飞跃障碍物平均用时9 s,单次降落平均用时4 s,单次抓取/投放平均用时4 s,抓取投放成功率在90%以上,图像识别失误率为1.67%。
实验结果表明,这种基于机器视觉的无人机雪山垃圾回收系统,降低了人工作业的强度和危险性,在保护环境的同时保障了清洁人员的人身安全。本项目既能带来社会效益又能带来经济效益[3],可应用于雪山垃圾回收的领域。
猜你喜欢
艺术学研究(2021年4期)2021-09-10
环球时报(2020-12-05)2020-12-05
初中生学习指导·中考版(2020年10期)2020-09-10
江苏教育(2020年5期)2020-04-26
科技视界(2019年19期)2019-08-29
小学生必读(低年级版)(2019年10期)2019-04-13
航空模型(2017年12期)2018-05-08
西夏研究(2017年4期)2017-08-17
新课程·小学(2017年2期)2017-03-25
航空模型(2016年5期)2016-07-25
