基于改进和声算法的直流电机PID参数优化*
2023-01-30 04:08:10罗鸿赟邹德旋徐福强
计算机时代 2023年1期
罗鸿赟,邹德旋,章 猛,徐福强
(江苏师范大学电气工程及自动化学院,江苏 徐州 221116)
0 引言
直流电机因其启动和调速性能好、过载能力较强,受电磁干扰影响小且后期维护成本小等特点,在工业生产中得到了广泛的应用。直流电机的启动[1]、调速[2]等过程都需要控制器的参与。比例积分微分(Proportion Integral Differential,PID)控制器由于其结构简单,鲁棒性高且安全性高等特点,是直流电机控制的经典控制方法[3]。PID 控制器的参数,影响着控制系统的性能及稳定性,如果依赖人工经验对PID 参数进行调整,不仅会提高人力成本,而且调参精度也是得不到保障的。
启发式智能优化算法让PID参数优化问题新增了更为有效的解决方式,文献[4,5]中,使用粒子群算法(PSO)和遗传算法(GA)两种经典算法对PID 参数进行优化。文献[6,7]中将近几年新兴的鸡群优化算法(CSO)和天牛须算法(BAS)应用到了PID 参数优化中。针对智能优化算法本身的缺陷对PID参数优化带来的负面影响,文献[8]作者引入小生境技术和分布式原理对粒子群算法进行改进。文献[9]作者对遗传算法的交叉算子、变异算子进行了改进。文献[10]提出一种将蚁群算法和模拟退火算法融合用于PID控制器参数优化的方法。文献[11]引入自适应权重策略来平衡海鸥优化算法的全局搜索和局部搜索能力。相较于基本型的智能优化算法,这些改进算法通过各种有效的改进策略,有效地提高了PID参数寻优能力。
为了提高针对直流电动机PID控制器的参数优化能力,本文提出一种融合麻雀搜索策略并拥有全局参数自适应能力的混沌和声搜索算法。该算法提高了和声搜索算法的全局搜索能力,收敛速度更快,寻优精度更高,通过仿真实验表明,该算法优于PSO 算法、GA 算法、CSO 算法、BAS 算法等几种优秀的PID 参数智能寻优算法。
1 直流电机PID控制器
PID调节即比例、积分、微分控制,PID参数的优化对于直流电机使用中的安全性、经济性、可靠性有着重要的作用。因此在使用过程中,PID 参数需要根据过程的动态特性及时整定。PID调节的控制规律为:

其中,Ti为积分时间常数,Kp为放大系数,TD为微分时间常数。
在额定励磁条件下,直流电机的电压平衡关系为:

其中,Ud为外加电压,Ea为感应电势,Ra为电枢电阻,La为电枢电感,ia为电枢电流。
直流电机的转矩平衡关系为:

其中,Te为电磁转矩,Ti为负载转矩,B为阻尼系数,J为转动惯量,ω为电机机械转速。
直流电机电磁转矩与电枢电流的关系为:

其中,Km为转矩系数。
直流电机感应电势与转速关系为:

其中,Ke为电势系数。
综合以上关系式,通过拉普拉斯等计算,可建立的直流电机模型的传递函数如下:

2 基本和声搜索算法
与蚁群算法、鸡群算法、天牛须算法等受到动物界启发的智能优化算法不同。和声搜索算法是Geem等[12]受到人类艺术创造过程的启发,模拟调音师反复调整不同乐器音调使之达到最优美和声这一过程,通过反复调整记忆库中的解变量,使函数值随着迭代次数的增加不断收敛,从而来完成优化。
和声搜索算法(HS)于2001 年提出。和声搜索算法概念简单、可调参数少、容易实现且得到广泛工程应用。
基础和声搜索算法步骤如下。
⑴定义问题和算法参数值
和声搜索算法参数主要有:和声库(HMS)和声记忆库取值概率(HMCR),音调微调概率(PAR),音调微调带宽(BW)。
对于一个非约束最优化问题,通常可定义为:

⑵随机初始化和声记忆库
从解空间里随机生成HMS 个和声变量,可以将HMS 个和声个体理解成种群X1,X2,...,XHMS,将种群放入和声记忆库,并记录对应的f()X,因此和声库的形式可以表示为:

⑶生成新和声
生成一个新的和声在[0,1]之间产生一个随机数r1,与HMCR 进行比较。确定是否需要对新的和声进行扰动;若r1<HMCR,则从和声记忆库中随机拿出一个和声变量。否则,从解空间随机生成一个和声变量。由于和声变量是从和声记忆库中随机拿出,为了提高算法寻优能力,需要对这个和声变量进行微调。此时在[0,1]之间产生一个随机数r2,若r2<PAR,根据微调带宽BW对该和声变量进行扰动,扰动规则如式⑼所示,得到一个新的和声变量。否则,不做任何调整。

其中,xnew和xnew(i)为扰动前后新解的第i个解分量,u为带宽,u为[0,1]的随机数。
⑷更新和声记忆库
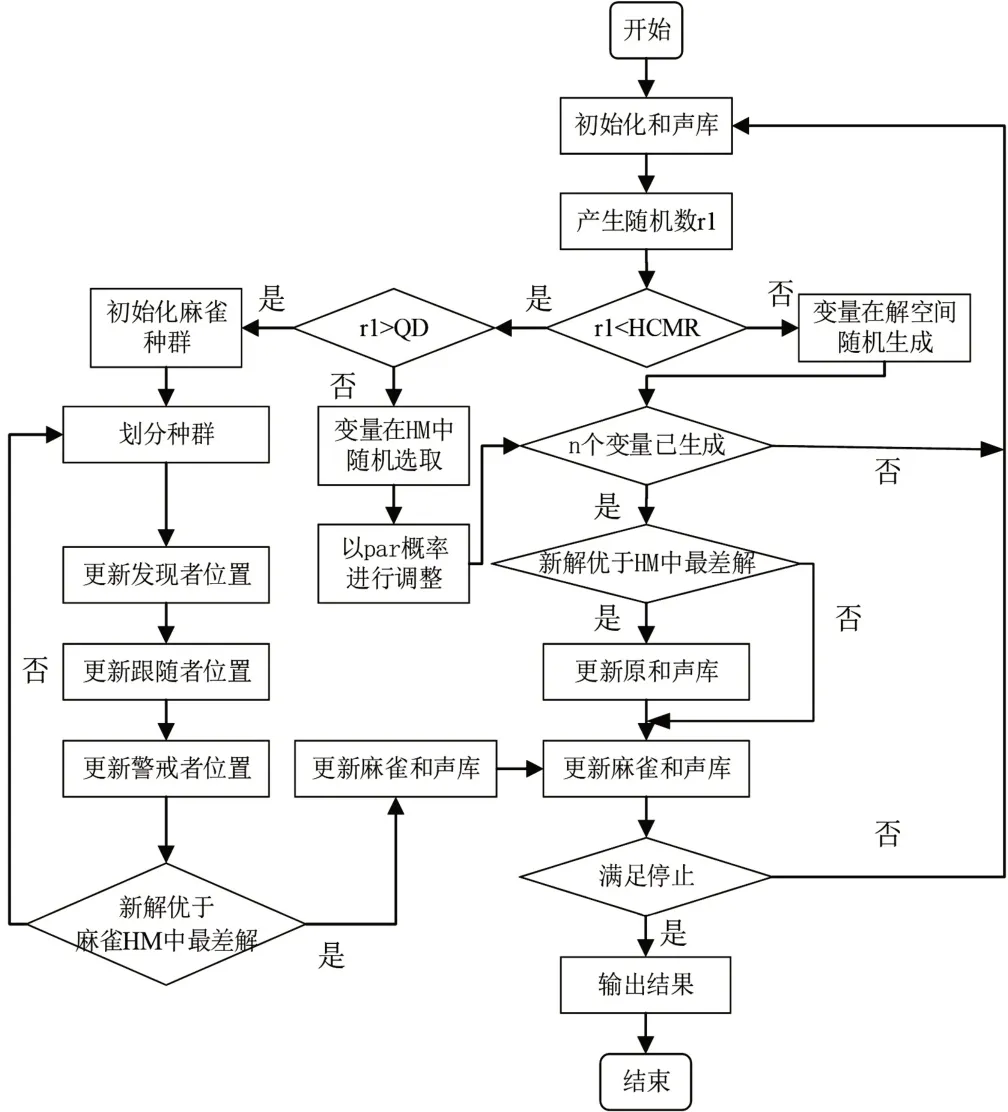
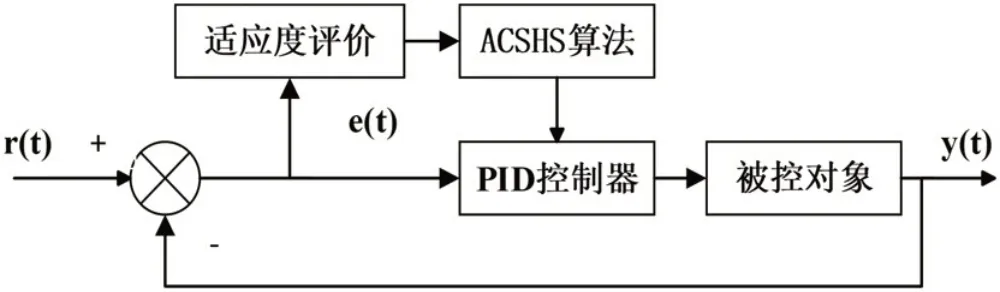
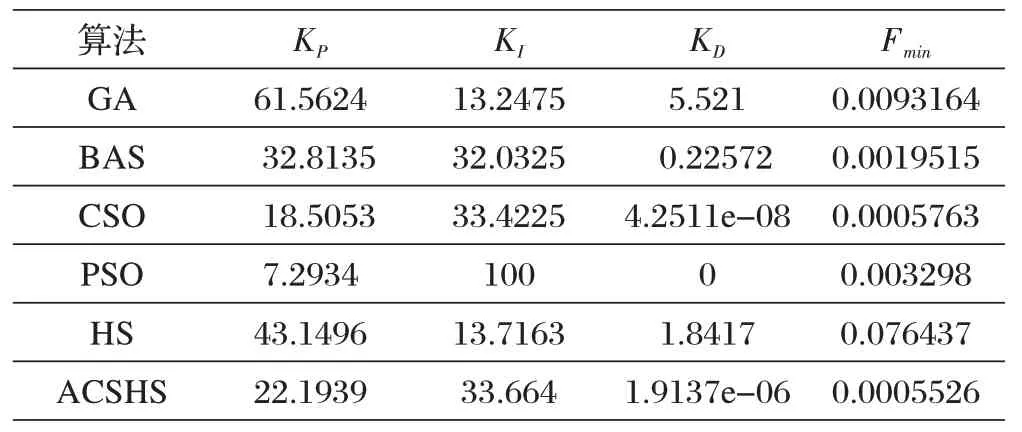
对新得到的和声xnew进行使用目标函数对其进行评估,即评估u。若新产生的函数值优于和声库中的函数值最差的一个,即f(xnew) ⑸检验算法是否终止 重复步骤⑶和⑷,直到创作(迭代)次数达到Tmax为止。 从和声算法的优化流程可以看出,虽然和声搜索算法可调参数少。但是参数的选择仍然会影响算法的寻优速度和寻优精度。如果将和声向量比作种群,那么仅仅是随机初始化的和声种群,种群质量会比较差。此外,和声搜索算法发布已有二十余年,虽然结构简单,方便实现,但是基础和声算法性能相较于近几年提出的一些新型算法,例如鸡群算法(CSO)、天牛须算法(BAS)、麻雀算法(SSA)等,性能有限。 针对以上提出的和声搜索算法存在的问题,本文通过多种改进策略,提出一种自适应混沌麻雀算法(ACSHS)。改进后的算法流程图如图1所示。 图1 改进和声搜索算法流程图 以下具体介绍改进策略。 和声搜索算法的初始和声库一般是通过随机初始化产生,解的质量难以保证。随机初始化的和声向量在解空间中分布混乱,没有方向性。且每次仅随机产生一个和声向量,搜索速度虽然快,但影响算法整体的寻优精度,且难以跳出局部最优。李敬花[13]等通过遗传算法计算产生初始和声库,提高了初始解的质量,但是过程实现较为繁琐。而使用混沌映射初始化种群,兼具随机性和遍历性的优点,且代码实现简单。常用的混沌映射有logistic 映射、Tent 映射和Sine 映射等。且Tent 映射具有更好的均匀性和更快的迭代速度[11]。Tent混沌表达式如下: Tent 混沌初始化和声种群的过程如下:首先随机生成一个[0,1]内的d 维向量作为初始和声,其次经过每一维迭代生成新的和声个体,最后将全部和声个体映射到变量的取值范围内生成Tent 混沌初始化和声种群。采用Tent 混沌映射生成的初始和声库与随机生成的和声库相比,和声个体分布更均匀。 PAR 值和BW 值的设置会影响算法的寻优范围和跳出局部最优的能力。偏大的PAR和而偏小的BW 值会减弱算法搜索初期的寻优范围和寻优能力。而较小的PAR值和偏大的BW 值又容易使算法搜索后期陷入局部最优。因此我们希望参数值可以随算法迭代自适应变化。PAR 值和BW 值的自适应参数公式如式⑾和式⑿所示: 其中,t是当前迭代次数,T是总的迭代次数。PARmax是微调概率取值上限,PARmin是微调概率取值下限,BWmax是调整幅度取值上限,BWmin是调整幅度取值的下限。自适应参数可以保证算法的寻优范围且有效增强算法跳出局部最优的能力。 麻雀搜索算法(SSA)是受麻雀觅食行为和反捕食行为的启发于2020年由Xue[15]等提出的一种新型智能优化算法。作为一种新兴的智能算法,其具有很强的全局寻优能力,算法并行性好且收敛速度快。麻雀种群根据不同比例分为发现者、捕食者、警戒者。搜索过程中不断更新发现者、捕食者和警戒者位置来对全局进行搜索。 当HMCR 较大时候,和声搜索算法结构简单,搜索快速。而HMCR 较小时,和声搜索算法性能较低,此时启动麻雀搜索算法进行更详细的局部搜索。在和声搜索过程中设置启动阈值QD 来控制麻雀搜索算法的启动。完成麻雀搜索过程后,将麻雀搜索结果生成麻雀和声库。在更新和声库时将麻雀和声库与主体和声库进行信息交互,减少算法后期因种群多样性降低而对算法寻优能力产生的不良影响,提高了算法寻优能力。 因为时间乘以误差绝对值积分(ITAE)的性能指标具备很好的工程实用性和选择性的控制系统性能评价指标,所以本文在仿真实验中选择ITAE 指标评价适应度值,ITAE 定义如式⒀所示。基于ACSHS 算法的PID参数优化流程如图2所示。 图2 基于ACSHS的PID参数优化原理图 利用改进后的和声搜索算法优化PID 参数流程如下。 ⑴利用Tent混沌映射初始化和声库。 ⑵在[0,1]之间产生一个随机数r1,与HMCR 进行比较。确定是否需要对新的和声进行扰动,以及判断是否符合麻雀搜索的启动阈值,是则进行步骤⑶和步骤⑷,否则和声算法单独搜索后直接进入步骤⑸。 ⑶当HMCR 满足麻雀搜索的启动阈值时,初始化麻雀种群进行协同搜索。 ⑷将麻雀种群与和声库进行信息融合。 ⑸更新和声库。 ⑹检验算法是否终止。 本文以电感La=0.02,电阻Ra=5,电动势常数K=0.85,转动惯量J=0.04,机械阻尼B=0.016 设置参数,建立直流电机模型。 选取PSO 和GA 两种经典算法,CSO 和BAS 两种新兴算法,以及HS 算法和改进后的ACSHS 算法,对以上直流电机模型做仿真实验,设置的种群规模均为N=50,维数均为3维。几种算法参数设置如表1所示。 表1 几种算法的参数设置 其中,HMCR 为和声种群取值概率,PAR 为扰动概率,BW 表示和声带宽。Pc 表示GA 算法交叉概率,Pm 表示变异概率。ω是PSO算法惯性因子值为0.5,c1,c2是学习因子。G 表示为CSO 算法每更新一次子群结构的间隔代数,Pr是公鸡比例,Ph是母鸡比例。BAS算法参数设置为:d 表示BAS 算法初始化天牛触须长度,eta表示为触须长度衰减系数,eta是步长系数。 实验设置PID 寻优范围[0,100],系统输入信号采用单位阶跃信号,采样时间间隔设置为0.001s,仿真时间5秒,仿真工具为MATLAB2020a。 实验分别采用GA、BAS、CSO、PSO、HS、ACSHS算法对直流电动机模型进行仿真,得到各个算法的适应函数变化曲线和系统阶跃响应输出曲线分别如图3和图4 所示。各种算法优化的直流电动机PID 参数及目标函数值如表2所示。 图3 适应度变化值曲线 表2 直流电动机PID 参数及目标函数值 从表2 中可以看出,ACSHS 算法的寻优精度高于其他算法。PSO 算法和GA 算法两种未经改进的经典算法在寻优精度上劣于近几年提出的BAS 算法和CSO 算法。通过改进后的HS 算法,算法性能有明显提升。 可以在图3 中看到。CSO 算法和ACSHS 算法不仅在收敛精度上明显优于其他几种算法,而且改进后的ACSHS 算法同时兼具速度优势。ACSHS 算法拥有很强的跳出局部能力,在寻优后期也未出现明显的陷入局部最优的情况。 在图4 中ACSHS 算法的上升时间和峰值时间明显优于除PSO 算法外的其他算法。但PSO 算法的超调量和调节时间存在明显的劣势。ACSHS 算法比起其他5种算法,拥有更好的性能指标。 图4 系统阶跃响应曲线 综上所述,经过多种策略改进后的和声搜索算法,相较于基本和声算法收敛速度和全局寻优精度有明显的提升,相较于新兴的算法,也可以发挥其优势。且使用ACSHS算法优化的PID系统,具有很好的鲁棒性。 针对直流电动机PID 参数的优化问题,更多新的智能优化算法被提出,同时经典的智能优化算法不断被改进改进。无论算法新旧,只要合理利用算法的优势,就可以让PID参数优化问题拥有更多选择。 本文提出的多策略改进的和声算法应用于直流电动机PID 参数整定,通过MATLAB 仿真结果表明,算法有非常大的性能提升。并与几种常见的优秀的PID 优化算法进行仿真实验对比,本文方法表现出更高的控制精度和更快的收敛速度,验证了本文方法的有效性与实用性。这项研究给直流电动机参数优化方法新添了一项不错的选择,拓宽了和声搜索算法的工程应用面,可以有很好的工程应用前景。3 改进和声算法优化PID参数
3.1 Tent初始化策略

3.2 自适应和声参数

3.3 麻雀搜索策略
3.4 PID参数优化流程

4 仿真实验
4.1 控制对象及仿真条件设置

4.2 仿真结果及分析


5 结束语
猜你喜欢
大电机技术(2022年5期)2022-11-17 08:12:56
烟台大学学报(自然科学与工程版)(2021年1期)2021-03-19 08:38:42
作文小学中年级(2019年10期)2019-11-04 00:39:52
新世纪智能(高一语文)(2018年11期)2018-12-29 11:32:06
趣味(语文)(2018年2期)2018-05-26 09:17:55
电子制作(2017年1期)2017-05-17 03:54:12
山东青年(2016年1期)2016-02-28 14:25:22
电测与仪表(2015年15期)2015-04-12 00:43:48
淮南师范学院学报(2015年3期)2015-03-22 01:16:17
河北科技大学学报(2015年5期)2015-03-11 16:16:37