远距离喷浆机在马兰矿的应用
2023-01-26 10:11刘涛
机械管理开发 2022年11期
刘 涛
(山西西山煤电股份有限公司马兰矿,山西 古交 030205)
引言
国内煤矿井下大多使用转子式混凝土喷射机,用于干料、潮料混凝土喷射作业。转子式混凝土喷射机的给料部分、喷射部分为一体(即它只有一个料腔,同时用于给料和喷射作业),给料和喷射时密封处于相对旋转状态,密封结构不可靠,并极易出现磨损造成密封失效,以致喷射距离短,仅能达到60~80 m,并产生较大粉尘,料腔通过出料口频率较低,喷射时脉冲大,物料不能连续[1-2]。喷浆机纯人工手动作业,机械化程度低,劳动强度大。在煤矿井下条件苛刻,设备运输困难情况下,为生产现场及作业带来非常大的挑战。
远距离、无尘化的喷浆装备和自动化、机械化、适用性高的喷浆工艺,最终达到增大喷浆距离、降低粉尘浓度、降低作业强度,提高喷浆质量的目的。
1 远距离喷浆机结构及工作原理
PYC6Z 型液压转子式混凝土喷射机(以下简喷射机)主要由行走装置、料斗、锥形给料装置、喷射系统、液压泵站、气路系统、润滑系统及除尘器构成。设备的所有零部件均固定在行走装置上;行走装置由履带底盘、底板焊接件等构成;喷射系统的驱动部分固定在行走装置上,喷射系统主要包括气料室、叶片轮、减速机和马达。气料室上固定有锥形给料装置和料斗,通过锥形给料装置的定量锥形转子的旋转将物料送入到气料室内,再通过叶片轮的旋转将物料在风压的作用下将物料输送出去。喷射机采用全液压驱动方式,配套的液压泵站与控制系统提供所需液压动力通过手动控制来实现各动作。远距离喷浆机原理结构如图1 所示。
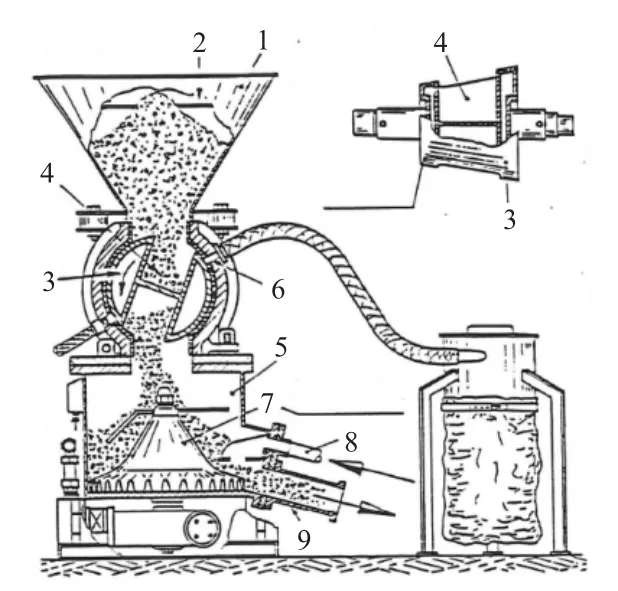
图1 远距离喷浆机原理结构
1.1 工作原理
1)混合喷浆料(现场拌制或配料厂拌制或袋装、筒仓储存材料),送入料斗,经过筛子将大颗粒筛除后进入锥形给料装置内的料杯内,然后落入气料室。
2)落料点前处,压缩空气通过锥形壳体进入有料料杯。空气喷射使物料松散,有利物料充分落入气料室。
3)物料从料杯排出后,其内的残余压缩空气通过余气口排出,若有残余物料也随压缩空气一块排出进入集尘器。然后空料杯旋转继续从料斗中接料。通过液压控制给料装置旋转速度,控制送往气料室物料的多少。
4)气料室的补压气使其中的物料尽量疏松(有利物料的输送),再通过叶片轮旋转将物料送至物料出口。
5)压缩空气通过进气口进入气料室,并通过布置在叶片轮料杯顶部上侧的鹅颈管导向出料口。压缩空气将叶片轮上料杯内喷浆料吹出通过出料口、输送管路流向喷嘴。叶片轮的转速可以无级调节,实现物料均匀送向喷嘴。
1.2 设备结构
1)料斗由锥形圆桶、筛网、振动器构成。
2)行走装置由履带、底盘焊接件构成。履带由液压马达驱动减速机构带动链轮及履带实现行走,履带张紧机构由油缸和弹簧控制,油缸可调整履带的张紧程度。同时同向操作左、右行走换向阀可实现设备前进和后退,操作其中一个换向阀可实现设备的左转或右转。
3)锥形给料装置由锥形壳体、定量锥形转子、马达构成。锥形壳体由金属壳体和衬胶构成;定量锥形转子通过马达的带动在锥形壳体内旋转,实现物料转送。
4)喷射系统由气料室、叶片轮、液压马达、减速机、链轮组、链条构成。气料室是连接锥形给料装置和输送管道的中枢结构,呈圆桶状。叶片轮是圆锥体底部的叶片轮料杯,围绕在圆锥体底部周围。叶片轮将混凝土分成一个个的“小单元”,减少了单次喷射混凝土的质量,再加上气料室内部的密闭环境,使得混凝土获得0.5 MPa 压强的初速度之后,在输送管道中速度不会减少太多。叶片轮的设计在一定程度上实现了长距离喷射混凝土的作业效果[3]。
5)液压泵站与控制系统由电机、双联泵、油箱、调速阀、操纵阀、压力表、冷却器、过滤器、液压管路等组成,液压泵站布置在行走装置上。
6)气路系统由阀门、管路、压力表构成。
1.3 技术参数
1.3.1 设备型号
设备型号如图2 所示[4]。
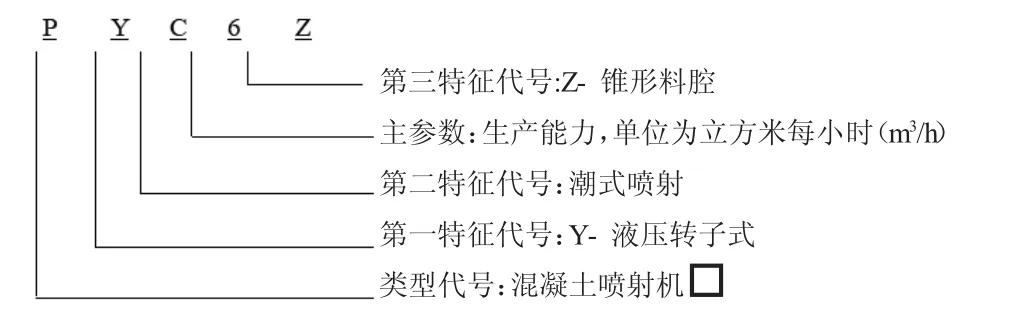
图2 设备型号
1.3.2 主要技术参数
远距离喷浆机主要技术参数见表1。
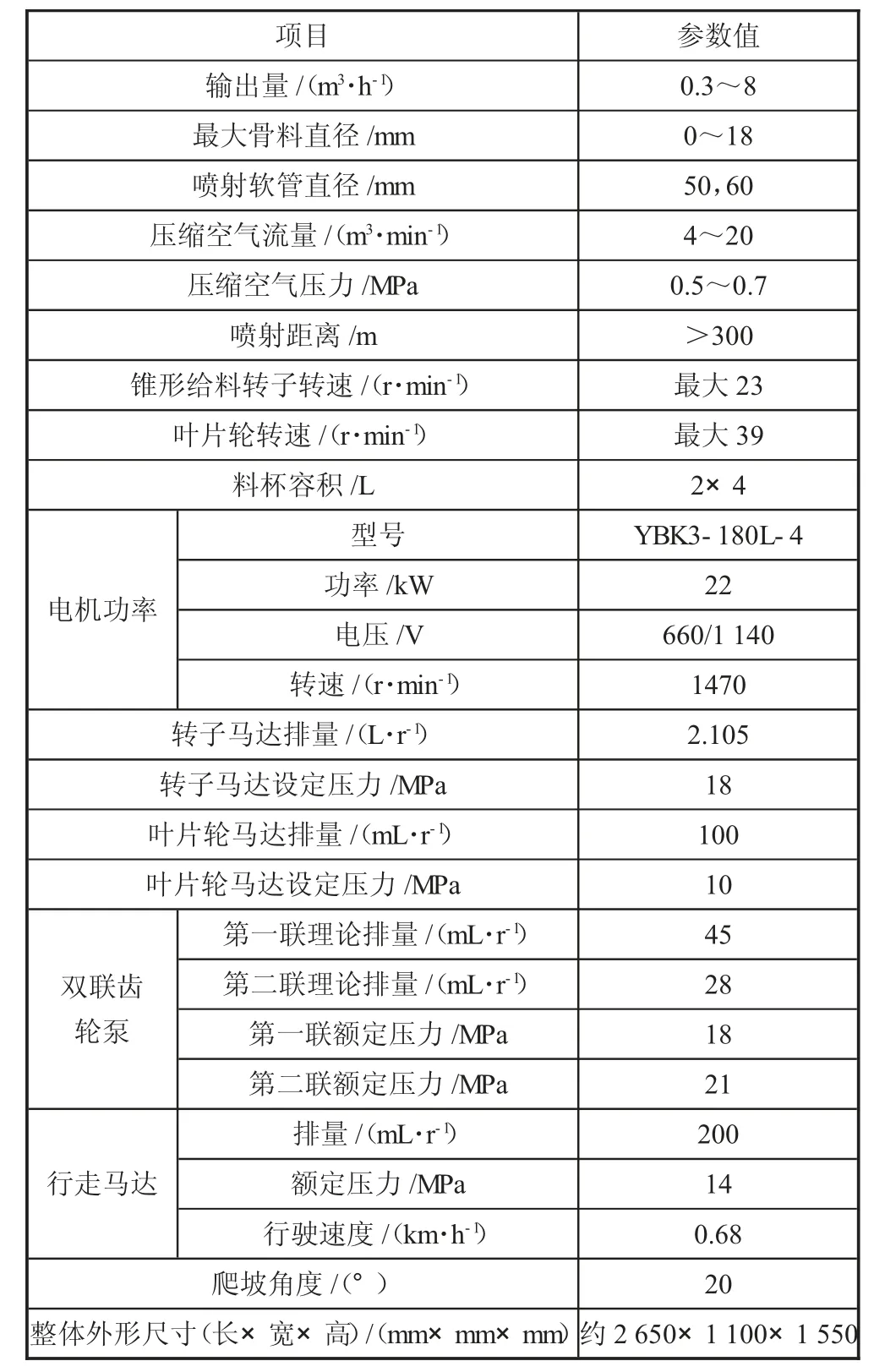
表1 主要技术参数
2 在马兰矿的应用效果分析
2.1 远距离喷浆机特点
旧式喷浆机每60 m 就要挪移一次喷浆机,制约了现场全岩巷道快速掘进速度。远距离喷浆机具有以下优点:输送距离长,最大可达水平500 m;粉尘浓度低,机旁粉尘浓度低于国家标准10 mg/m3;喷射连续无脉冲,混凝土回弹小;密封可靠性高,磨损件更换周期长,一般6 个月更换一次;整机结构可靠,系统运行稳定,维护成本低;设备使用全液压驱动,运行过程中安全、可靠;采用履带式行走机构,设备移动更加方便快捷;解决了喷浆效率低,回弹率高,及施工过程中远距离喷浆的难题。
2.2 具体应用
马兰矿现在南八盘区使用远距离喷浆机,南八回风下山、南八回风大巷、南八皮带下山及南八轨道下山,设计长度累计长达10 000 m,解决了喷浆效率低,回弹率高,及施工过程中远距离喷浆的难题。在保证巷道施工质量的同时,降低了人工强度,减轻了职工劳动强度,加快了巷道施工速度。
3 结语
马兰矿在南八盘区使用了远距离喷浆机,远距离喷浆机的使用,解决了喷浆效率低,回弹率高,及施工过程中远距离喷浆的难题。在没有轨道运输的情况下,完成了480 m 的远距离定点喷浆工程,比预计工期缩短了近一个月,节约成本近30 万元。在保证巷道施工质量的同时,降低了人工强度,减轻了职工劳动强度,加快了巷道施工速度,且施工操作相对简单,推广前景巨大。
猜你喜欢
湖南工业职业技术学院学报(2022年3期)2022-12-06
作文小学高年级(2022年4期)2022-05-27
昆明医科大学学报(2021年1期)2021-02-07
世界有色金属(2020年8期)2020-12-10
四川水利(2020年1期)2020-03-11
中国交通信息化(2018年12期)2018-03-21
作文周刊·小学二年级版(2016年45期)2017-07-18
中南大学学报(自然科学版)(2016年2期)2017-01-19
中国交通信息化(2016年12期)2016-06-06
中华老年口腔医学杂志(2016年5期)2016-03-01