机载激光雷达在山区地形图测绘中的应用研究
2023-01-17 03:00司大刚任智龙柴生亮
科技创新与应用 2023年1期
司大刚,任智龙,柴生亮
(兰州资源环境职业技术大学,兰州 730021)
我国公路建设飞速发展,公路的勘察与设计的任务逐年增加,而道路勘测周期短、地形复杂,勘测难度大;传统测量技术手段在公路勘测中效率不高等问题日益凸显;如何快速高效获取高精度、海量信息的地形数据成为制约道路勘察设计亟需解决的问题,而机载激光雷达扫描测量技术的应用较好地解决了这一难题。
本文结合广西高速公路勘测工程实例,以机载激光雷达技术带状地形图测绘试飞项目为研究背景,对道路勘察测绘地形图建立数字地面模型及进行相关数学精度分析研究,实践了机载LiDAR 在道路勘测中的应用的可行性。
1 机载激光雷达系统的系统组成及其误差来源
机载激光雷达技术源自20世纪60—70年代激光测距之后逐渐发展起来的一种新型主动式航空遥感对地观测技术,该技术具有极高的角度、距离和速度分辨率,能获得被照射目标的多种空间数据信息,因其获取数据速度快、受天气影响小和数据高程精度高等优点,使其在当代航空测量技术方面获得了广泛的应用。
机载LiDAR(Light Laser Detection and Ranging),又称机载雷达(如图1所示),是激光探测及测距系统的简称,集成了现代激光扫描技术(laser andscanning subsystem)、计算机技术、高动态载体姿态测量技术(inertial measureunit,IMU)和高精度动态GPS 差分定位技术于一体的空间测量系统。其中惯性导航系统是该系统的核心组成部分。系统的高度集成使得集中被照射目标的光斑足迹位置信息能够准确可靠地得到,可以提供比其他诸如航空摄影等测量手段更为详细的地理模型。当然,系统的集成使得系统必将受到激光测距、姿态测量和GPS 定位的精度影响。
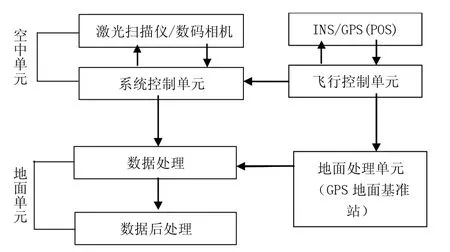
图1 机载激光雷达系统组成略图
机载激光雷达测量的误差按其产生的来源可分为以下4 类:①GPS 定位误差;②激光扫描测距误差;③测角误差;④系统集成综合误差。GPS 动态定位误差是目前影响机载激光雷达测量精度的最主要误差源之一,一般为厘米级到分米级。
2 机载LiDAR 测图实验
2.1 实验区概况
本项目测区位于广西壮族自治区北部资源县梅溪镇。受地形地势的影响,山地立体气候特征明显,雨量充沛,年降雨量区域分布呈现出自北向南逐渐增加的趋势,降雨量一般在1 431~2 507 mm,春、夏两季多雨,尤其是5—6月份降雨量最多,占年降雨量的35%。路线所处区域属山岭区地貌,区域内主要山脉长达40 km 以上,以中山或低中山地形为主,地表植被茂密,沿线山高谷深,交通较为困难,给外业测量带来诸多不便。
2.2 项目实施关键技术
一般来讲机载激光雷达作业过程涉及飞行准备、航飞实时数据获取、数据处理和数据应用等关键部分。另外机载激光雷达数据量庞大,高效的数据处理软件开发也至关重要。
(1)航线设计
本项目中,高速公路里程约515 km,考虑测区轮廓线状分布特点及机场起降线影响,为了提高飞行效率,把整个项目分4 个分区设计,并且确保首末2 条航线包含摄区边界且实际覆盖不少于像幅的50%,至少有2 条基线超出航向边界线。由于本项目地形起伏较大,属于山地,根据相关技术指标及精度要求,航摄按平均点云密度不小于1.4 点/m2,点间距0.8 m,点云旁向重叠度不小于20%,影像航向重叠度不小于60%设计。摄区共敷设30 条航线,预计获取数码影像2 742张,航线总长度720 km,如图2所示。

图2 测区航线敷设示意图
2.2.2 检校场设计
为了消除仪器本身由安装、运输和振动所带来的相对位置的偏移,主要是IMU 记录的角度值和激光点的角度值有一定的系统误差。在飞行任务开始前或者飞行任务结束后,需要对整个激光设备进行本地检校。在测区中峰乡选择了检校场,选择十字相交(接近90°)的2 条长2 km 以上的路面平坦的宽阔公路;摄区相对平坦,并且包含平坦裸露地形,有明显的凸出地物,有尖顶房屋,屋顶朝向各方向都有;存在明显地物点(如道路拐角点等)与基站的距离宜在10 km 范围内;飞行安全性;相对航高1 300 m。检校场选择满足选择原则。检校场共设计6 条航线:AB、BA、CD、EF、FE 和GH。其中,AB 垂直于EF,CD 平行于AB,旁向重叠度为60%,GH 平行于EF,旁向重叠度为60%,BA 为AB 的对飞航线,FE 为EF 的对飞航向。
2.2.3 GPS 基站设置
本次项目控制测量采用标称精度为5 mm+1 ppm的徕卡1 230/530 双频GPS 接收机,其中天线安置采用对中精度不大于1 mm 的光学对中器和三脚架。在外业测量作业前必须对GPS 接收机及光学对中器等进行检验和校正。沿线路以每30 km 为半径布设国家三等GPS 控制点(高程为大地高)作为LiDAR 航飞时的地面基站,全线需布设3 个控制点。
2.2.4 飞行操作与数据采集
为测区飞行作业的方便,机场选择应以综合考虑飞行保障条件、空中管制力度和摄区飞行距离等因素的同时顾及目前国内航摄飞机状况、租机费用和飞行安全等条件。通过比较分析,本项目确定使用衡阳航校的运-五飞机及桂林两江机场,在规定的航摄期限内,选择地表植被较少,其他覆盖物对成像影响较小,云雾少、大气透明度高,无扬尘(沙),光照充足的季节进行摄影。
2.2.5 数据处理
本项目主要利用Leica 公司设备配套软件和TerraSolid 软件对机载LiDAR 数据进行激光雷达数据处理。包括在IPAS 软件中对所获取GPS 及IMU 数据进行综合处理,利用ALS Post Processor 解算原始记录数据,利用FramePro 确定影像的初始外方位元素;在Terrasolid 软件中进行数据处理,在Terra Scan 模块中进行点云滤波分类,在Terra Modeler 模块中制作数字地面模型和数字高程模型,在Terra Photo 模块制作数字正射影像图。
3 精度分析
3.1 误差统计
本次实验结果的数学精度采用外业数据监测的方法进行,其中高程精度检查采用GPS-RTK 和含四等水准成果的控制网数据对比数字地模高程精度的方法进行检测。
通过精度统计结果发现(如图3所示),激光点云高程和外业实测高程的误差在-0.5~0 m 之间占比约36%,在0~0.5 m 之间占比约43%,在0.5 ~1 m 之间占比约17%。激光点云高程和外业实测高程的误差绝大部分分布在0.5 m 以内,占比为79%。而误差1 m 以内则占比为96%。

图3 高差分布图
3.2 地形等级和植被覆盖疏密程度的影响分析
3.2.1 误差与地形等级的关系统计分析
根据误差与地形关系数据统计,对比分析地形和误差之间的关系,将误差与地形之间的关系按照平地、丘陵和山地3 个类别进行统计。
从统计结果可以看出,误差0.4 m 以内山地和平地的数量相当;误差0.4 m 以外,山地数量明显上升,而平地数量增加较少,分布曲线如图4所示。

图4 误差与地形关系曲线
究其原因,平地上,由于地形起伏不大,其高程变化较小,即使利用穿过茂密植被的极少数的点构建地膜,与实地的高程差值也会较小;而山地,由于高程变化较大,需要较多点参与构建地膜,才能与实地地形较好地吻合,如果植被较多导致到达地面的激光点数据很少,则很难拟合出真实的地表,从而导致拟合高程与实地高程差值较大。
从而得出结论:在植被覆盖密集的区域,激光点云在平地的平均精度要高于激光点云在山地的精度。
3.2.2 误差与地貌的关系统计分析
根据误差与地貌关系数据统计,对比分析地貌和误差之间的关系,此次地貌类型按照裸露地、庄稼地、稀灌、稀树、树林、密灌和密林为类别进行误差统计。从统计表结果可以看出,大部分裸露地表的激光高程与外业实测高程之差在0.2 m 以内,占比63.6%,而误差0.4 m 以内则占比90.9%;庄稼地的误差大部分集中在0.1 m 以内,占比75%,如果将误差设置为0.4 m,则占比为87.5%;稀灌地区的误差也主要集中在0.4 m 以内,占比81.8%;而树林里面60%点精度在0.3 m 以内,而密灌则44.4%的点精度在0.4 以内,48.1%的点精度集中在0.4~1 m 之间;7.4%的点精度在1 m 以上,分布曲线如图5所示。

图5 误差与地貌关系曲线
从而得出结论:地表植被越稀疏,激光点越容易到达地面,其精度越高。
3.2.3 误差与地表覆盖物激光穿透难度系数的关系
为了确认误差大小与激光穿透难度的关系,根据地表植被的覆盖程度,将难度分为5 等。分别为:非常容易、容易、困难、非常困难和几乎不可能。
对于激光非常容易穿透到达地面的区域,其精度在0.3 m 以内部分,达到了87%,而对于容易穿透的区域,其精度在0.4 m 以内的数据占比也达到了55%。而困难地区,更是达到了73%,这说明稍微多一点植被,只要没有成片,达到“密不透风”,对点云精度的影响是有限的。而对于非常困难的区域,精度0.4 m 内的点只占到45%,而0.4~1 m 精度范围内的点占比达到41%,分布曲线如图6所示。

图6 误差与地表覆盖物激光穿透难度系数的关系
结论:激光点云的精度和地表植被的易穿透程度有密切关系,在容易穿透的区域,由于到达地面的激光点多,其拟合的DEM 精度就高;相反,在难以穿透的区域,由于到达地面的激光点少,其拟合的DEM 精度低。
3.2.4 误差与陡坎的关系
从误差与地形、地貌、植被覆盖程度关系曲线可以看出有5 个点,其点位均位于平地上,且地物也大多为稀灌和裸露地,激光穿透也非常容易,可其精度均比较大,甚至达到0.6 m 多。
由于激光点云数据的点与点之间有一定的间距,很难刚好在陡坎边或者坡脚线上有点,如果激光点云和真实地表的关系如“激光点云地面和真实关系示意图——陡坎”图7所示,这时,中桩位置刚好在坡脚线A 点或陡坎最边缘B 点,则会导致两者之间的高程差异最大。
图7中的点表示激光点云数据;ab、cd 连线表示点云数据构建的地膜;各点连线表示地面;BE、AF 连线表示真实地表和激光点云数据构建的地表之差。
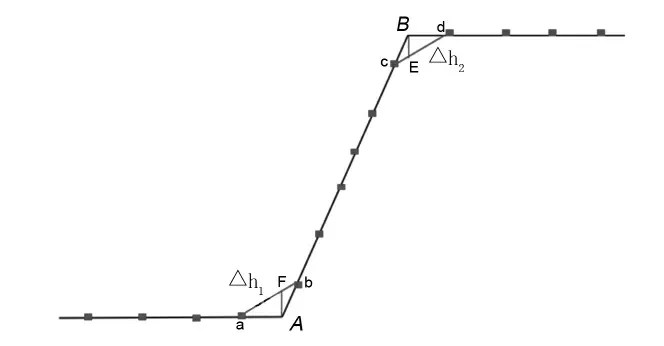
图7 激光点云地面和真实地表关系示意图——陡坎
总结规律如以下2 点:
(1)点云密度越大,则激光点越接近A 点和B 点,则两者之间的差值就会越小;
(2)在坡脚A 处,地表高程会低于激光高程;而在B 点处,地表高程会高于激光高程。
总结得出具体的解决办法如下:
(1)提高点云密度,使其高差在容许限差范围内;
(2)通过同步影像,采集特征线,利用特征线参与构建地膜,提高地膜精度,使两者之差满足限差要求。
4 结束语
本文结合工程实例阐述机载LiDAR 技术用于道路勘测设计快速获取数据,在地形条件复杂的山区或植被茂密、覆盖范围较多的工程作业区范围内,利用机载LiDAR 可以快速高效获得高精度的数字高程模型,并能提取到多种勘测成果,这对于缩短公路勘测周期和减少工程勘测难度,有很大的现实意义。
猜你喜欢
北京测绘(2022年5期)2022-11-22
地下水(2022年5期)2022-10-19
城市勘测(2022年2期)2022-05-09
汽车观察(2021年8期)2021-09-01
建材发展导向(2021年13期)2021-07-28
当代陕西(2020年23期)2021-01-07
河南水利年鉴(2020年0期)2020-06-09
中国交通信息化(2019年1期)2019-03-26
电子制作(2018年16期)2018-09-26
消费导刊(2017年8期)2018-01-18