天绘二号时间同步误差分析与评估验证
2023-01-14 08:27:08张笑微董小环
测绘学报 2022年12期
黄 艳,张笑微,丛 琳,董小环
1. 地理信息工程国家重点实验室,陕西 西安 710054; 2. 西安测绘研究所,陕西 西安 710054; 3. 中国资源卫星应用中心,北京 100094
天绘二号卫星是基于干涉合成孔径雷达(interferometric synthetic aperture radar,InSAR)技术的微波测绘卫星系统,与光学遥感技术相比,具有全天候、全天时、数据处理自动化程度高等突出优点,其主要产品是数字表面模型和雷达正射影像。卫星获取的雷达干涉数据通过地面系统处理,在无地面控制点条件下,其精度与德国TanDEM-X编队系统[1-5]相当,满足1∶5万比例尺的定位与测图要求,可为我国基础测绘任务提供可靠的数据源,用于国家空间数据基础设施建设、自然灾害检测、大流域和河道治理、水利和电力建设等方面[6-12]。
天绘二号卫星由两颗对等卫星组成,采用异轨道面卫星编队、雷达一发双收工作的技术体制,在该技术体制下,收发分置的雷达所收到的回波信号具有较好的相干性,但需要发射与接收雷达之间相互协调、相互配合。为此,要求参与工作的雷达天线波束对准地面同一目标[13]、雷达收发定时匹配[14]、雷达频率源相位相参[15],即空间、时间、相位载荷三同步[16-18]。天绘二号卫星对时间同步要求高,提出了85 ns的设计指标,本文重点对卫星时间同步机理及误差进行分析与评估。
1 卫星时间同步机理
分布式微波卫星测绘体制要求主星与辅星同时采集同一地域的回波信号,这就需要主星与辅星用于采集回波的定时信号在时间上要对准,即需要实现双星定时信号的时间同步[19-20]。时间同步主要包含两方面,一是时间同步的建立,它是指在某一时间点,两雷达时钟的时间读数相同;二是时间同步的维持,它表示完成时间同步建立后,两雷达时钟时间走时的准确性。时间同步误差会在回波中引入相位误差,严重降低雷达图像质量。星间时间同步通常利用GPS时钟长期稳定度较好的特性,结合高稳晶振或芯片级原子钟短期稳定度较好的优点实现GPS驯服晶振[21]。为达到时间同步的要求,TanDEM-X SAR系统采用频率一致性指标为10-8量级的晶振,并采用跳跃脉冲重复周期(PRI)方法,确保600 s内,时间同步误差小于5 μs[22]。
天绘二号卫星时间同步采用秒脉冲(pulse per second,PPS)触发建立、GNSS驯服晶振保持的方案。雷达每次开机成像时,利用星间相对状态测量分系统提供的星间同步脉冲信号进行初始同步,其后在开机成像期间利用GNSS驯服的高稳定度晶振实现时间同步的保持。该方案技术途径与TanDEM-X相同,天绘二号卫星在定时产生上选用高时钟频率FPGA,降低触发脉冲的调整步进间隔,提升时间同步起始精度;同时在星间测量设备上引入高精度铷原子钟作为频率基准,进一步提升频率准确度,提升时间同步保持精度。
卫星的星间相对状态测量分系统为SAR有效载荷提供时间同步参考信号,GNSS接收机输出给雷达的PPS脉冲频度为每秒一次,在每次SAR开机成像前(首定标后),雷达定时信号产生模块接收到当前的PPS脉冲信号后,根据星间相对时差数据对PPS脉冲信号进行适当延时处理,作为单次触发信号产生雷达定时信号,使两颗卫星的雷达定时信号彼此同步。
时间同步建立的实现流程如下。
(1) 编队卫星上的GNSS接收机输出PPS脉冲,并将各自GNSS原始数据利用星间链路对传,经解算后获得卫星位置、相对状态、GNSS时间、相对时差等数据。
(2) GNSS接收机输出经过驯服的80 MHz信号经同轴电缆送给SAR中央电子设备,作为基准频率产生的参考源,同时GNSS输出的PPS脉冲通过同轴电缆送给SAR中央电子设备的监控定时器,作为定时信号产生的同步触发信号。
(3) GNSS接收机输出的相对时差等数据通过星上1553B总线由综合电子分系统转发给雷达监控定时器。
(4) SAR中央电子设备利用GNSS驯服的80 MHz信号二分频后的40 MHz信号作为雷达定时信号产生的时钟信号。
(5) 监控定时器接收到PPS脉冲信号后利用本地40 MHz信号进行选通,实现与40 MHz时钟信号的同步。
(6) 监控定时器由1553B总线接收到相对时差数据后,输出延时控制信号实现对PPS脉冲的延时调整。延时调整采用四舍五入的策略,调整后使得主星与辅星的PPS脉冲对齐。
(7) 经延时调整对齐后的PPS脉冲分别触发产生主星与辅星的雷达定时脉冲重复频率(pulse repetition frequency,PRF)信号,实现雷达定时信号星间时间同步的建立。
星间时间同步建立过程中各种定时信号的时间关系如图1所示。

图1 时间同步建立过程中定时关系Fig.1 Timing relationship during time synchroniza-tion establishment
星间状态测量分系统输出的GNSS驯服晶振信号具有高度的频率一致性,InSAR成像期间主星与辅星利用该高频率一致性的GNSS驯服晶振信号作为频率源,基于频率计数的方法产生定时信号,可以实现时间同步的保持。雷达系统的时间与频率源的关系为
(1)
式中,f(τ)为频率源信号的频率;f0为频率源信号的标称频率;T0为0时刻。
2 误差分析
根据时间同步机理,其误差从时间同步的建立和时间同步的维持两方面进行分析。
2.1 时间同步建立误差
根据起始时间同步实现流程,中央电子设备子系统在实现起始时间同步过程中引入误差主要有:PPS脉冲选通误差、PPS延时调整误差、PRF触发延时误差、相对时差数据接收滞后误差、延时调整量化误差、相对时差数据误差。起始时间同步误差链路如图2所示。
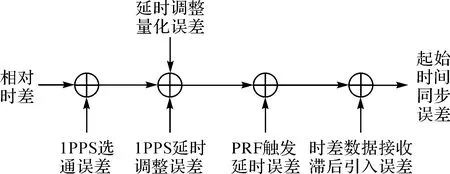
图2 时间同步误差链路Fig.2 Time synchronization error link
下面分别对各项误差进行说明。
(1) PPS脉冲选通误差。主星与辅星PPS脉冲选通如图3所示。由于定时时钟的频率为40 MHz,时间分辨率为25 ns,在对外部PPS脉冲进行选通时产生的最大时间误差为25 ns。
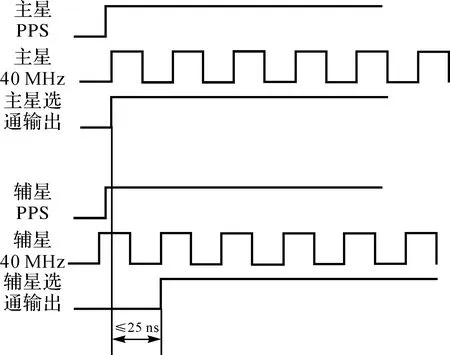
图3 PPS脉冲选通过程Fig.3 Pulse gating process
(2) PPS脉冲延时调整误差。选通后需要对时间超前的PPS脉冲进行延时调整,延时调整通过FPGA内部的同步时序逻辑电路实现。由于延时调整采用同步时序逻辑电路实现,因此无论需要多少级触发器,延时调整带来的时间误差均为单级电路的延时,该误差项最大不超过2 ns。
(3) PRF触发延时误差。经过延时调整将两颗卫星的PPS脉冲基本对齐后,将PPS脉冲送给雷达定时信号产生器,触发产生雷达定时PRF信号。定时信号产生在FPGA内部实现,考虑FPGA内部电路延时,触发产生的PRF信号相对于PPS脉冲有所滞后,滞后时间为一级电路延迟,因此误差为最大2 ns。但由于主星与辅星均有该触发操作,因此触发产生的时间误差仅为电路延迟的不一致性部分,保守估计,该项误差按照1 ns考虑。
(4) 时差数据接收滞后带来的误差。根据星间相对状态测量分系统的论证,相对时差数据的输出比当前PPS脉冲滞后不超过4 s。实现起始时间同步时利用4 s前的相对时差数据对下一秒的PPS脉冲进行延时调整,也会带来时间误差。在SAR开机进入成像之前,GNSS接收机停止对晶振的驯服和PPS脉冲的时间调整,在此期间引入的时间误差增加量为:0.1×(不修正的秒数+5)ns。系统要求在进入成像之前2 s GPS停止驯服晶振和调整PPS脉冲,则由于相对时差数据接收滞后带来的时间误差为0.7 ns。
(5) 延时调整量化误差。中央电子设备子系统接收到1553B总线送来的星间相对时差数据后,利用40 MHz时钟对PPS脉冲进行延时调整,相当于对星间相对时差进行量化,量化间隔为25 ns,量化策略采用舍入量化,则延时调整量化引入的最大时间误差为12.5 ns。
(6) 相对时差数据误差。中央电子设备子系统接收1553B总线送来的星间相对时差数据并不完全精确,经星间相对状态测量分系统论证,该相对时差数据精度为5 ns,相应在中央电子设备建立起始时间同步过程中,相对时差数据本身的误差也被传递到时间同步误差中,即相对时差数据本身引入的误差为5 ns。
各部分的误差量级见表1。时间同步建立的误差优于46.2 ns。
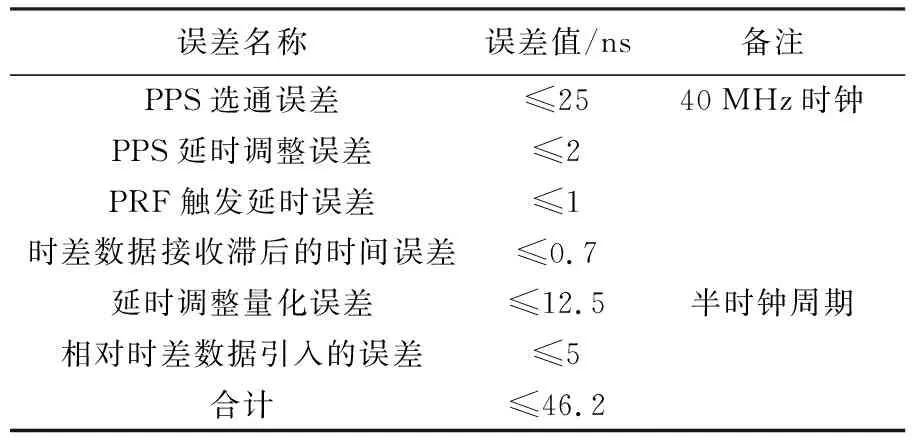
表1 时间同步误差因素
2.2 时间同步维持误差
对于时间同步维持误差,定时时钟信号的主辅星频率一致性为5×10-11,雷达开机最长为5 min,其误差为15 ns。
综合以上分析可知,时间同步误差最大为61.2 ns。
3 时间同步精度测试
3.1 地面测试
天绘二号卫星研制过程中在地面进行了时间同步测试,时间同步测试原理如图4所示。利用回波模拟器,将回波一分为二之后送入雷达接收通道,雷达收到回波数据后,通过比对回波数据脉冲压缩后的峰值点位置差,计算时间同步误差。
整个双星测试阶段共录取了119组有效的时间同步测试数据,测试覆盖了A、B星互为主辅星、卫星主备份等多种组合。常温常压测试条件下,SAR工作5 min数据4组、SAR工作2.5 min数据14组,时间同步误差最大为36.33 ns。真空测试条件下,共获取101组时间同步精度测试的有效数据,其中SAR工作5 min数据12组,SAR工作1 min数据14组,SAR工作2.5 min数据75组。时间同步误差最大为54.1 ns。该结论与分析结果基本一致。
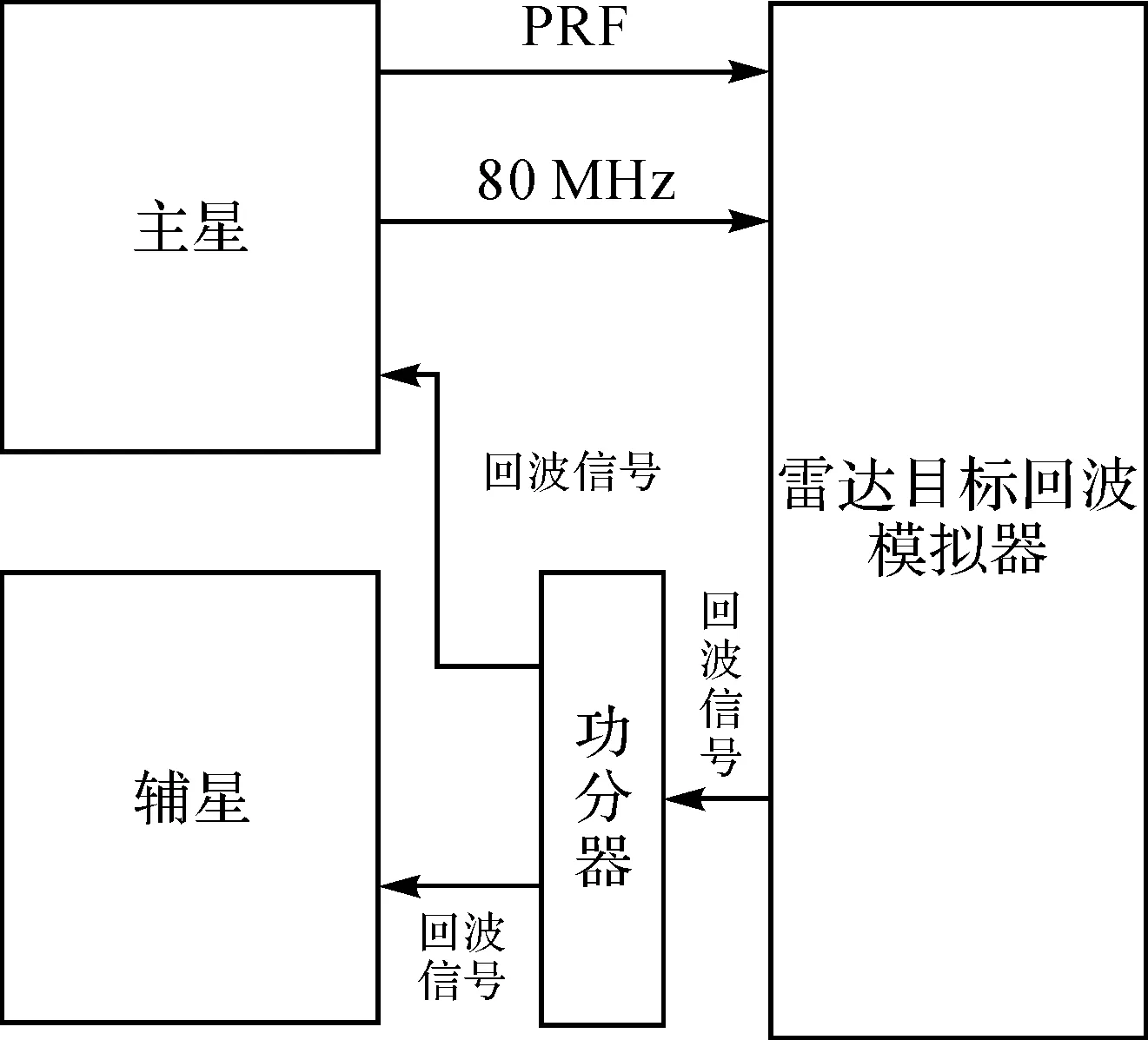
图4 时间同步测试原理Fig.4 Time synchronization test principle
3.2 在轨测试
时间同步精度测试过程中,首先利用双星时间同步后对同一地物成像,然后将成像后特征点在两幅图像中距离向的像素差转换为对应的时间差,在此基础上进行对比分析,流程如图5所示。图5的几何定标场建设规划步骤中,根据卫星设计轨道沿卫星飞行方向在同一观测条带内前后布设多组、每组M个高精度角反射器作为控制点,M个角反射器的几何中心作为特征点。为保证测试精度选择64×64倍的插值模式,并计算每组M个角反射器的二维坐标作为特征点测试值。为了提高斜距差,主星采用精密绝对定轨数据计算斜距,辅星采用相对定轨数据结合主星绝对定轨数据的方式计算斜距。
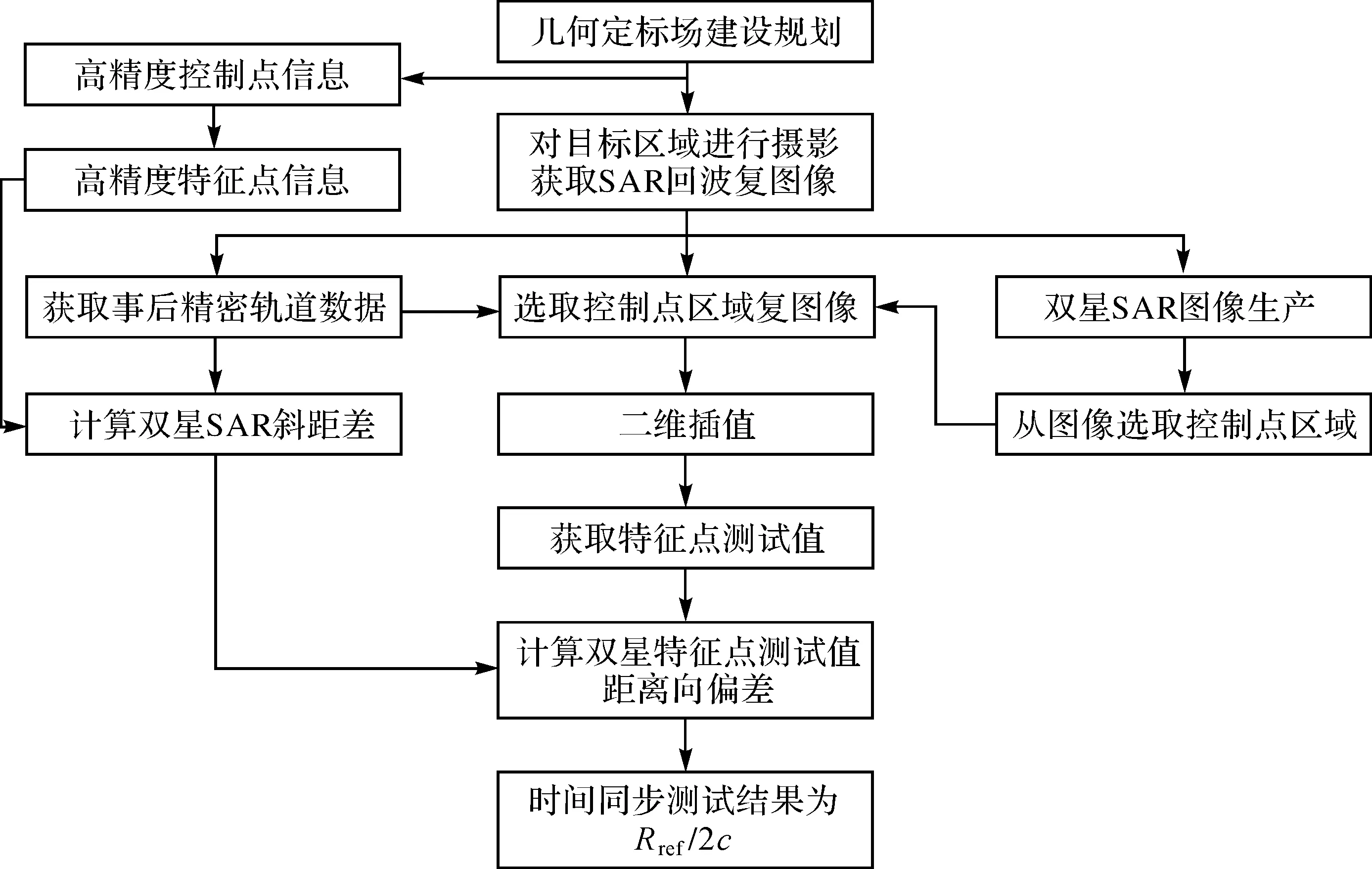
图5 时间同步在轨测试流程Fig.5 The synchronization in-orbit testing flow
时间同步精度测试在内蒙古临时综合试验场以及赤城山地精度检测场布设角反射器,卫星在轨对检测场进行拍摄,利用检测场的1B级产品数据测量时间同步精度。
双星时间同步精度在轨测试结果见表2,测试结果为:-16.611~18.856 ns,略优于分析结果及地面测试结果。
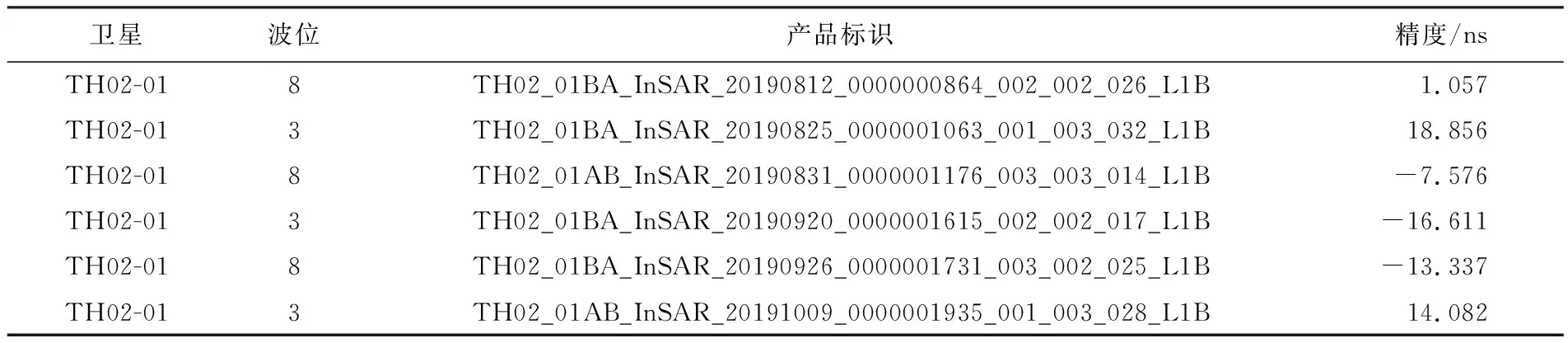
表2 时间同步精度测试结果
4 时间同步误差对系统性能影响分析
为评估时间同步误差对系统性能影响,以点目标为研究对象,推导时间同步误差对图像质量的影响。存在时间同步误差情况下的点目标回波信号为

exp(j2πfT(τ-R/c))
(2)
式中,t表示慢时间;τ表示快时间;R为目标双程斜距;Wa为天线方位向方向图;Tp为脉冲宽度,rect为矩形窗函数;ε(t)为时间同步误差;k为线性调频信号调频率;c为电磁波传播速度;fT为信号载频。经距离压缩,并将斜距近似为二阶模型,则信号可以表示为
sRc(t,τ)=Wa(t-tc)sinc{B[τ-R/c-ε(t)]}exp{-j4πR0/λ}exp[j2πfdc(t-tc)+
jπfr(t-tc)2]
(3)
式中,B为信号带宽;R0为相位中心到目标的最短斜距;fdc为多普勒中心;fr为多普勒调频率。由式(3)中可以看出:时间同步误差主要造成回波在快时间上的偏移,并未在回波中引入相位误差。根据时钟特性,时间同步误差可以建模为线性误差、固定误差、随机误差的组合
ε(t)=βt+α+e(t)
(4)
时间同步误差会引入固定的距离向位置偏移,从而使得主辅影像在距离向上不重合,不重合宽度为
(5)
式中,θ为入射角。在入射角为36°的情况下,85 ns会造成观测带损失21.7 m。
此外,由于成像过程中会利用斜距估计方位向调频率,因此时间同步误差会导致调频率估计误差
(6)
式中,vr为卫星等效速度。经距离徙动矫正和方位压缩后,点目标图像为
sfig(t,τ)=sinc{B[τ-R/c-ε(t)]}
exp(-j2πfrtu)du
(7)
式中,Ta为合成孔径时间。根据式(7),固定时间误差会导致方位分辨率展宽、旁瓣比抬高,根据天绘二号卫星参数计算,在36°入射角的条件下,时间同步误差仿真参数如下:固定时间同步误差按46.2 ns,线性时间同步误差按15 ns/5 min,随机时间同步误差利用频率源实测相位噪声仿真得到。对存在上述时间同步误差情况下的点目标的图像质量进行了仿真分析,分析结果见表3,从结果可以看出,仿真条件下时间同步对图像质量的影响可以忽略。
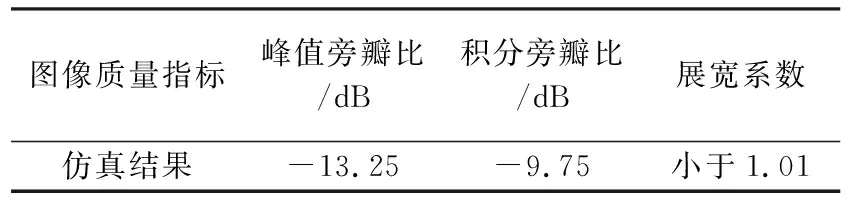
表3 点目标图像质量
5 结 论
天绘二号卫星系统采用基于卫星编队的技术体制,具有很好的灵活性,容易满足InSAR干涉所需有效基线。近几年基于卫星编队的InSAR技术受到许多国家的重视,成为主流发展趋势[23-25]。天绘二号卫星系统完成在轨测试并正常运行,验证了相关理论机理[5],其时间同步误差分析评估结果与地面双星联调测试和在轨测试结果一致,表明本文提出的误差分析方法正确,结果可靠。地面双星联调测试和在轨测试验证时间同步误差最大为54.1 ns,优于85 ns的设计要求,经仿真分析时间同步误差对系统性能的影响可以接受。
猜你喜欢
中学生数理化·八年级物理人教版(2023年11期)2023-12-26 07:50:10
作文大王·笑话大王(2023年8期)2023-07-17 04:09:28
数学物理学报(2022年3期)2022-05-25 13:33:28
自动化仪表(2020年10期)2020-11-13 03:31:00
空间科学学报(2020年3期)2020-07-24 09:23:28
中成药(2017年12期)2018-01-19 02:06:54
测绘科学与工程(2017年4期)2017-05-25 01:48:16
船舶力学(2015年6期)2015-12-12 08:52:20
汽车维护与修理(2014年10期)2014-02-28 12:15:01
河南科技(2014年23期)2014-02-27 14:19:00