分布式InSAR卫星系统编队指标体系研究
2023-01-14 08:27张德新陈筠力邵晓巍
测绘学报 2022年12期
陈 力,张德新,陈筠力,邵晓巍
1. 北京跟踪与通信技术研究所,北京 100094; 2. 上海交通大学,上海 200240; 3. 上海卫星工程研究所,上海 201109
通过分布在空间不同位置的多星协同工作,卫星编队系统可突破单星在功能和性能方面的限制,推动遥感观测、空间攻防和空间科学等领域的发展。分布式天基干涉合成孔径雷达(InSAR)成像可提供灵活的干涉测量基线,打破单一干涉基线技术瓶颈,大幅提升高程测量精度与效率。德国宇航中心研制的全球首个近距离双星编队微波干涉测绘卫星系统—TanDEM-X[1],开创了干涉合成孔径雷达(SAR)技术新纪元。TanDEM-X发射前先开展了包括编队设计、控制和规划等全流程技术指标体系论证工作[2]。其第1次全球覆盖时间为462 d,数据达标率为66.4%[3-4];两次全球数据获取后,经数据融合处理的合格率可达90%以上[5],出色地完成了既定任务目标。
天绘二号是我国首个近距离双星编队的微波测绘卫星系统,也是继TanDEM-X后全球第2个分布式InSAR卫星系统[6]。虽然从技术体制上与TanDEM-X一致,但在卫星系统结构布局,时间、空间和相位同步等技术方面还存在明显差异[7]。本文根据卫星编队相对运动、SAR成像原理等理论,围绕高程数据获取要求(全球1∶50 000比例尺),论证了分布式InSAR卫星系统的编队设计、控制和规划指标分配,建立了图像旁向重叠度、干涉成像基线和对地观测效能3类应用指标论证模型,并应用上述方法论证了天绘二号指标体系。天绘二号在轨应用表明[6],上述论证方法基于应用与技术间的双重耦合特性,实现了快捷、高效卫星编队理论目标,充分发挥了天绘二号的测绘效能。
1 分布式InSAR卫星编队研制框架
分布式InSAR卫星系统可通过编队构形调整,提供满足全球各类地形测量要求的基线,实现全球一张测高图的应用目标[8]。因此卫星编队技术是影像获取的核心技术之一[9]。为实现编得快、控得省、用得好,同时全覆盖、高精度、高效能的全球陆地干涉成像需求,本文提出了InSAR卫星编队系统工程应用和理论研究体系框架,如图1所示。

图1 分布式InSAR卫星系统工程应用和理论研究体系框架Fig.1 System framework of distributed InSAR satellite system engineering application and theoretical research
工程应用需求指的是编队系统设计、控制和规划技术的指标体系论证,主要从保障全球无漏成像、提供满足测高精度要求的成像基线和提升观测效能3个方面出发,依据相对运动和干涉成像等原理,建立包含图像旁向重叠度、干涉基线和观测效能的指标模型。
技术和理论研究则是根据工程应用需求,实现卫星编队系统工程实施和理论研究的一体化应用,主要围绕编得快、控得省、用得好的目标,将卫星编队轨道设计、控制和资源优化调度等理论研究成果融入工程实践,进一步完善各项技术指标。
2 应用指标建模与分析
2.1 图像旁向重叠度建模与分析
图像旁向重叠度(POI)是全球无漏观测的重要保障条件之一,也是图像拼接的基础条件[10]。影响POI的主要因素有载荷单波位幅宽Wb、相邻波位重叠度Wc、波位总数目N、赤道相邻轨道经度向的间距Lg、卫星轨道星下点轨迹保持精度Lk、单星姿态指向偏差Lθ及编队相对运动在轨道平面外的投影rz(简称轨道平面外投影)[11]。分布式InSAR卫星系统具有多波位重访观测特点,POI指标可分解为相邻波位旁向重叠度ηz和相邻轨道的首尾波位重叠度ηo,且
ηz=(Wb-Wc)-2(Lk+Lθ+rz)
(1)
ηo=N(Wb-Wc)+Wc-Lg-2(Lk+Lθ+rz)
(2)
于是,当Wb、Wc和N确定时,可分别建立单星轨道设计与保持、单星姿态控制和编队构形设计的指标体系模型。
2.1.1 单星轨道设计与保持
编队系统通过主星轨道设计建立星地匹配关系,并需满足ηo≥ηstand以保证全球覆盖[12]。根据轨道动力学原理,卫星回归轨道周期数M与赤道相邻轨道经度向的间距Lg关系式为[13]
(3)
式中,Re为地球半径。联立式(2)和式(3)可知,主星轨道重访周期必须满足式(4)才能保证全球覆盖
(4)
此外,降低主星轨道回归周期可以提高重访观测能力。当卫星轨道高度确定时,卫星回归时间正比于M,因此主星轨道优化目标可取为min([2πRe/Lg]+1),其中,[·]表示取整。
轨道保持是指通过脉冲点火,克服空间摄动对卫星星下点轨迹漂移的影响实现标称的主星回归轨道,以使POI满足应用要求。由于星下点轨迹偏移量与POI成1∶2关系,高精度轨道保持可以提升POI,但需要频繁点火且消耗大量燃料,影响卫星寿命。根据式(1)和式(2),轨道保持控制精度指标应在综合考虑其他POI指标基础上,取下限值。
2.1.2 单星姿态控制
如图2所示,卫星横滚角控制精度直接影响POI,图2中,θo为姿态控制目标;Δθ为姿态控制误差;H为卫星轨高;βo为姿态控制目标圆心角;Δβ为姿态误差形成的圆心角偏差;α1和α2分别为标称入射角和包含误差的入射角。
考虑到
(5)
姿态控制误差Δθ和根据POI给定的单星姿态指向偏差Lθ的关系式为

(6)
因此,Lθ应与卫星姿态控制精度一一对应。
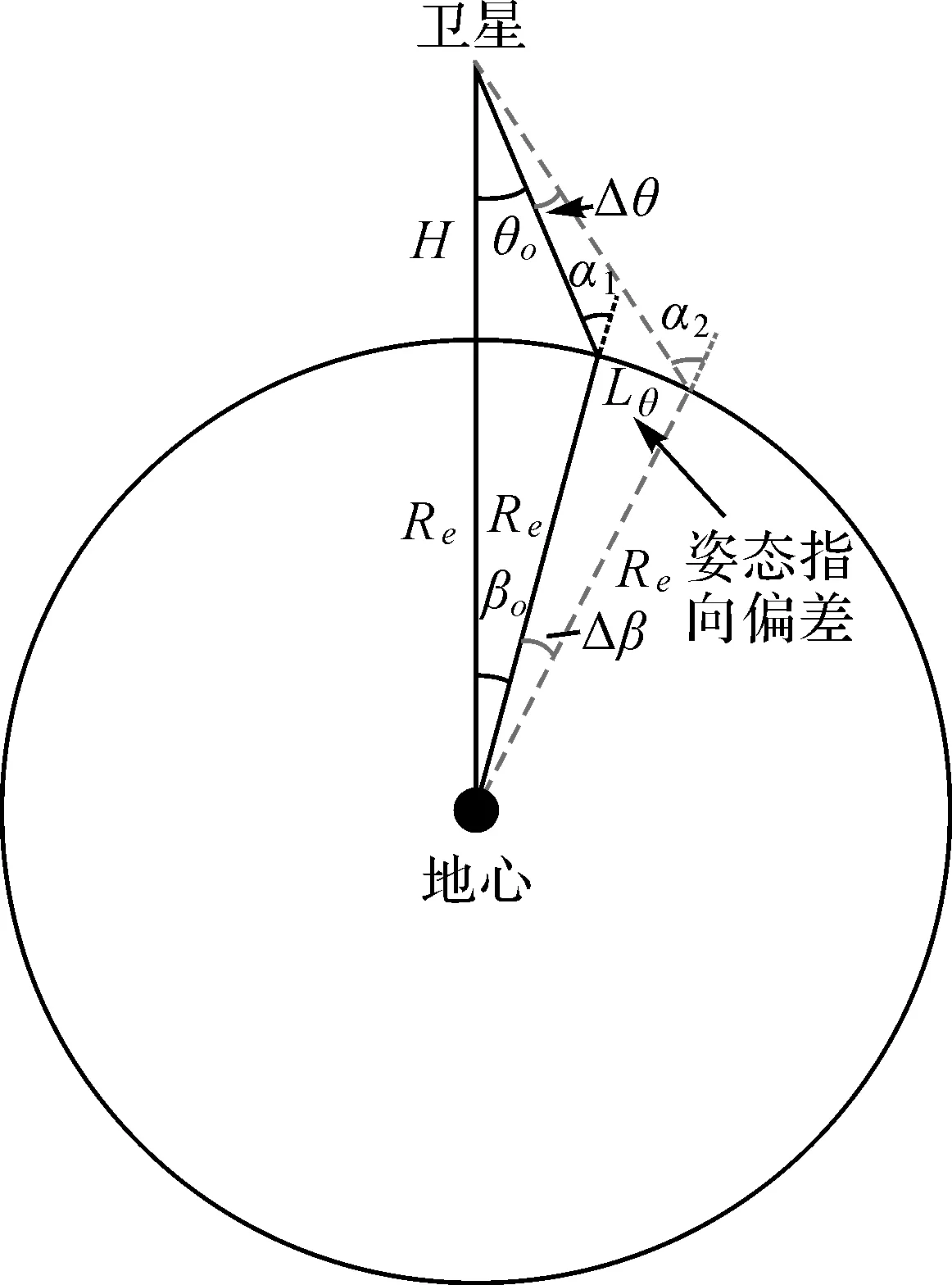
图2 单星姿态控制误差形成的图像旁向重叠偏差Fig.2 POI error caused by single-star attitude control errors
2.1.3 编队构形设计
绕飞相对运动的轨道平面外向量幅度为rz,方向与POI一致,而有效观测幅宽为观测波束的重叠部分,rz对旁向重叠度的影响为2倍关系。于是,对于小尺度分布式InSAR系统可按式(1)和式(2)设计。而当构形尺度较大时,建议通过姿态控制或其他方式进行主动补偿,消除该项对POI的影响。
2.2 干涉成像基线建模与分析
灵活的干涉成像基线是分布式InSAR卫星系统可以实现全球高精度测量的必要条件之一[14]。其中,构形设计提供了标称参考轨迹,构建了目标成像基线;编队保持消除了空间摄动对基线的影响,维持基线稳定;编队重构可实现基线的切换[15-20]。由于三者强耦合,技术指标存在强关联性,因此分布式InSAR卫星编队技术指标论证本质是一个迭代优化处理的过程。
2.2.1 编队构形建模与分析
分布式InSAR卫星系统采用对称绕飞构形构建干涉基线。在近圆主星轨道条件下,基于E/I向量描述的编队相对运动方程为[21-22]
(7)
式中,a为主星轨道半长轴,u为主星轨道纬度幅角。垂直有效基线BECT和沿航迹基线BAT分别为
(8)
式中,φ为对地观测下视角;ly=-1.5aδa(u-u0)+aδλ。将式(7)代入式(8)并化简得
BECT=ε|sin(u-ξ)|
(9)
式中
(10)

(11)
据此,可根据观测需求推导编队构形参数。
由于分布式InSAR编队双星距离较近,空间摄动力和控制残差造成构形的发散产生碰撞,且可能存在双星互射,引发电磁兼容问题。安全距离和电磁兼容指标为
(12)
2.2.2 编队保持建模与分析
相对运动受空间摄动因素存在发散现象[21]。在J2摄动作用下,基于E/I向量描述的构形参数受摄变化量为
(13)
式中
(14)
因此,可采用等倾角编队条件克服J2项摄动。此时,E/I向量受摄发散情况如图3所示。
(15)
(16)
综上,需根据编队构形参数,设计平面内保持周期和平面外控制阈值。同时,为支撑编队构形保持方案论证,编队构形设计需增加垂直和沿航迹基线受摄发散冗余量指标。

图3 J2项摄动对编队构形E/I向量的影响Fig.3 Effect of J2 perturbation on the E/I vector of formation configuration
2.2.3 编队重构建模与分析
编队重构可使编队系统在不同观测基线间切换,其燃料消耗主要受切换前后构形参数差影响。同时星间安全距离也将直接决定重构策略,以及燃料消耗和重构时间。因此重构安全性必须着重考虑。
可证明,对称绕飞编队构形式(7)的相对运动轨迹始终为椭圆,且长轴方向随平面内外初始相位角差变化。相对运动轨迹在xoz平面的投影最小值为
(ρxz)min≈rx·cos(φ-ϑ)
(17)
对于等倾角编队,ϑ=90°或ϑ=270°,有
(ρxz)min≈rx·sinφ
(18)
重构安全距离约束为
(19)
结合式(15),平面内构形尺度直接影响发散速度,通常应考虑构形保持频率和速度需求,在保障安全性要求基础上尽可能小。
2.3 对地观测效能建模与分析
为保证分布式InSAR卫星系统的高精度全球高程测量,还需在传统星地资源调度基础上,增加编队距离与地形匹配等特殊要求。由于主星严格回归轨道建立了稳固的星地匹配关系,全生命周期的资源调度使用得以实现。下面根据可视目标数量及其地理属性,通过选取卫星编队系统资源优化调度决策变量,建立开机成像、资源调度和成像获取3部分的指标体系,以保障数据获取合格率、提升观测效率。
2.3.1 决策变量集
系统资源调度的优化决策变量集为
Taski={sn,ts,te,tTb,m,l,u,q,e}
(20)
式中,sn表示重访周期内的轨道编号;ts表示重访周期内目标起始观测时刻;te表示重访周期内目标截止观测时刻;tT表示目标区域观测时长;b表示观测波位编号;m表示载荷工作模式;u表示任务来源;q表示任务最高优先级;e表示观测收益。上述变量充分考虑了升降轨对称观测特性(避免星间互射)及定常时空匹配关系(精密重访主星轨道)。
2.3.2 开机成像建模与分析
依据分布式InSAR卫星系统载荷成像特点,开机成像性能决策变量集可分为单轨成像、单轨开机及相邻轨道开机间隔3类。单轨成像指标是指载荷待机状态下的成像性能,包含单次最小成像时长、单次最大成像时长、最小相邻成像间隔,以及单轨累计成像总次数和总时长等指标。单轨开机指标是指载荷物理通电工作性能,包含单轨开机最大次数与最大时长,以及最小相邻开机间隔。相邻轨道间的开机间隔主要是为避免过渡放电,损坏电池使用寿命而单列的指标项。
2.3.3 资源调度建模与分析
资源调度指标主要包含能源、存储和数传等性能指标。若采用一发双收机制,卫星对地数据量较大,合理分配能源、存储和数传资源可提升观测效能。能源是支撑载荷开机成像的重要因素,能源指标可以成像时长为依据和单轨内待观测成像时长的统计结果进行设计。存储资源是载荷数据的中转站,其存储空间大小需通过重访周期内的接收与传输分析来确定。同时必须考虑单轨最大开机时长、载荷数据获取率和数传地面站分布和数据接收能力。数传资源是数据获取的末端环节,通常可先依据每轨待观测任务分布和每轨可开机时长进行初步设计,再结合存储资源进行迭代优化。
2.3.4 成像获取建模与分析
成像获取指标是基于成像质量和任务时间的系统性能指标。成像质量通过高度模糊度需求与实际高度模糊度差来定义(或由后续图像成像达标率来描述)。任务完成时间应基于资源调度方法进行全周期应用效能评估,支撑任务观测时间论证,也参与卫星编队系统保持和重构燃料消耗指标论证。
3 天绘二号卫星系统编队技术指标体系论证结果
依据上文提出的指标论证方法,本文对天绘二号卫星编队设计、控制和规划技术指标进行论证。结合全球陆地全覆盖、高精度、高效能应用需求及高效、快捷研究目标,共论证技术指标80余项,部分关键指标项论证结果如下。
3.1 编队设计技术指标论证结果
编队设计技术指标主要包含主星轨道和编队构形设计指标(表1)。主星轨道是在卫星轨道基本特性需求基础上,根据图像旁向重叠度需求完成回归周期和精度等指标项分配;编队构形设计则是在保证提供合格基线基础上,结合安全性、稳定性和高效性要求,完成星间被动安全距离与冗余量、构形数目、电磁互射角度、垂直和沿航迹基线冗余量等指标项分配。
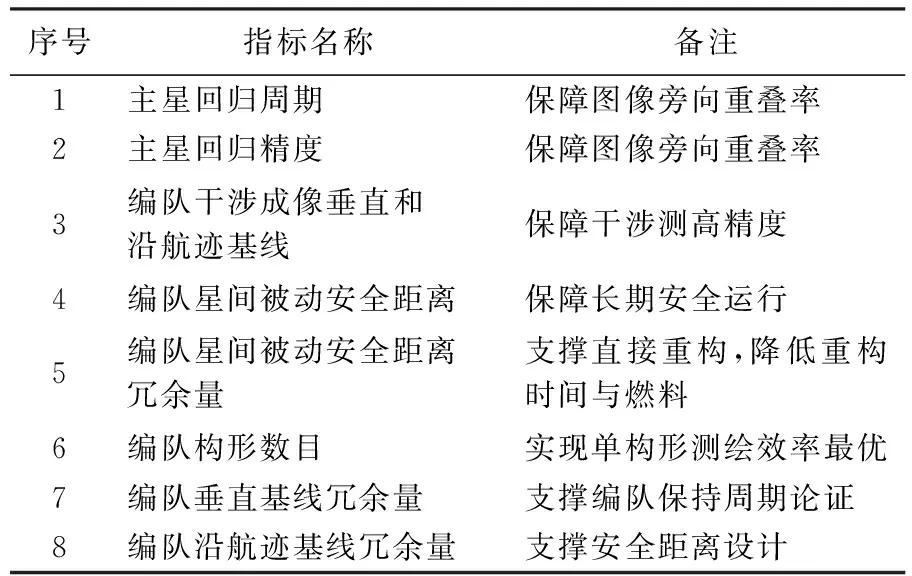
表1 天绘二号编队设计技术主要指标论证结果
3.2 编队控制技术指标论证结果
编队控制技术指标包含单星轨道保持、单星姿态控制、编队构形保持和重构4部分(表2)。单星轨道保持精度需结合轨控精度和POI论证。编队构形保持结合燃料消耗和点火频率论证保持周期、阈值与精度等。编队重构基于燃料消耗和时间论证不同重构方案的时间和精度。
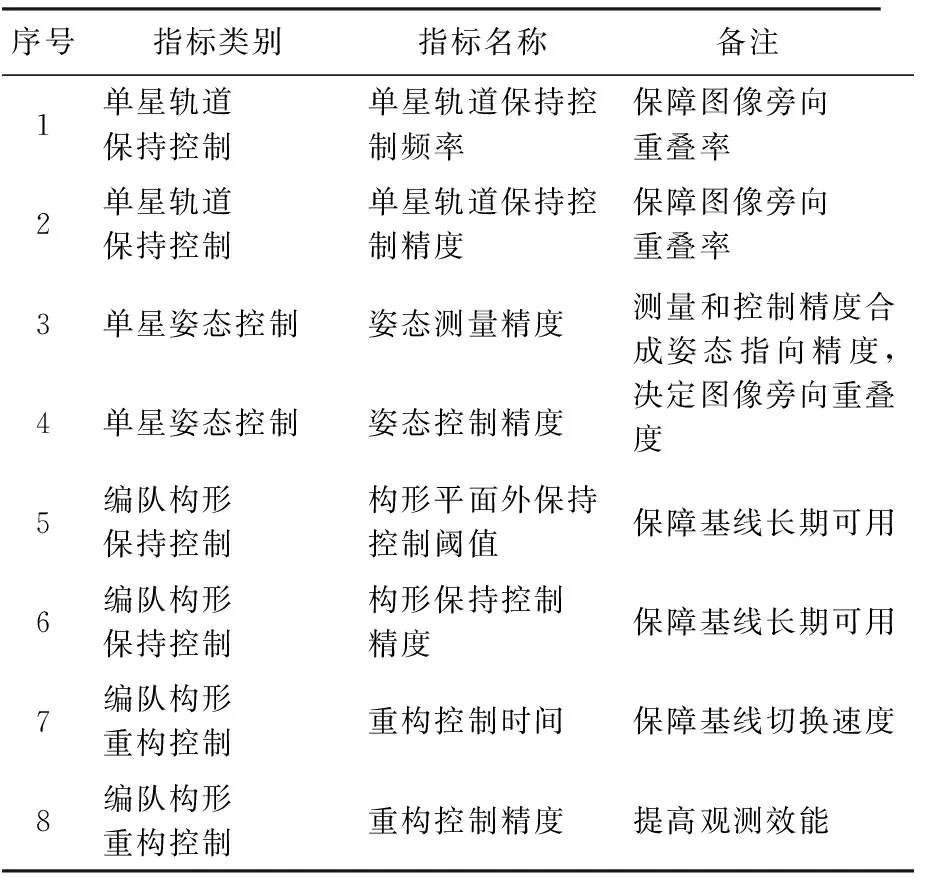
表2 天绘二号编队控制技术主要指标论证结果
3.3 编队规划技术指标论证结果
编队规划技术指标包含载荷开机成像、资源调度和成像获取3部分(表3)。载荷开机成像指标包括单轨开机次数、开机时长和单次成像时长等。资源调度是分析卫星平台和地面站可用资源,如星载存储容量、数传速率和时长等。成像获取根据成像质量和任务获取时间,提出数据合格率和全球覆盖时间指标。
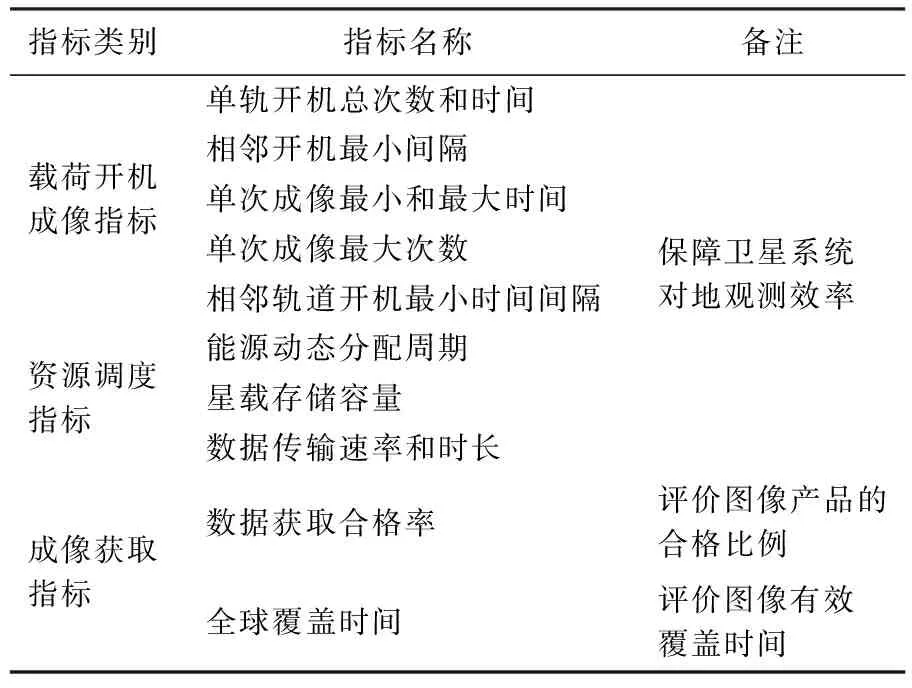
表3 天绘二号编队规划主要指标论证结果
天绘二号在轨应用结果表明:基于上述论证结果,图像产品的旁向重叠率始终满足图像拼接处理要求;主星姿轨控制和编队构形保持精度均满足型号研制要求;在设计的可测纬度范围内,干涉测量基线始终满足高程测量需求;成像指令有效执行率达到70%以上,对地观测效率相比日规划应用模式提升30%以上。
4 结 论
本文针对天绘二号全球1∶50 000比例尺测绘精度的研制要求及快捷、高效卫星编队理论目标,建立了图像旁向重叠度、干涉成像基线和对地观测效率3类应用指标体系模型;在深入分析应用与技术间耦合特性的基础上,完成了卫星编队设计、控制和规划技术的指标论证与分配工作。基于本文建立的卫星编队系统指标论证体系,天绘二号能在保障全球无漏观测的同时,提供满足多地形观测需求的干涉测量基线。同时,基于先期制定长期观测计划,可在保障对地观测达标率基础上,大幅提升观测效率。
猜你喜欢
空间科学学报(2021年6期)2021-03-09
科学(2020年5期)2020-11-26
中国惯性技术学报(2019年3期)2019-10-15
汉字汉语研究(2018年3期)2018-11-06
北京航空航天大学学报(2017年3期)2017-11-23
北京航空航天大学学报(2017年10期)2017-04-20
舰船电子对抗(2016年5期)2016-12-13
海军航空大学学报(2015年4期)2015-02-27
导航定位与授时(2014年2期)2014-04-27
航天器工程(2014年5期)2014-03-11