无刷双馈发电机的高电压穿越控制策略研究
2023-01-11 01:08李佳彬王淑红樊慧彬曹建文王一帆张爱玲
电机与控制学报 2022年12期
李佳彬,王淑红,樊慧彬,曹建文,王一帆,张爱玲
(1.太原理工大学 电气与动力工程学院,山西 太原 030024;2.山西天地煤机装备有限公司,山西 太原 030006;3.西南交通大学 电气工程学院,四川 成都 611756)
0 引 言
近年来,随着新能源发电的快速发展,风电机组装机容量在电网中的占比越来越大,给电力系统的安全稳定带来了巨大的挑战。高电压穿越能力和低电压穿越能力是各国电力系统对并网风电机组提出的强制性要求。我国国家标准《风力发电机组故障电压穿越能力》(GB/T 36995-2018)中对于电网电压骤升期间风电机组所应提供的无功支撑,故障发生、结束时刻的有功波动都做了严格的规定。
和双馈电机(doubly fed induction generator,DFIG)相比,无刷双馈电机(brushless doubly fed induction generator,BDFIG)没有电刷和滑环,在降低成本的同时增强了电机运行的可靠性。同时还具有所需变频器容量小、功率因数可调等优点,在风力发电领域具有广阔的应用前景[1]。近年来在BDFIG本体和控制策略方面都取得了大量的研究成果。在低电压故障穿越研究方面,现有的研究成果表明,无需附加任何硬件,BDFIG可以实现电网电压跌落100%情况下的穿越[2-3]。但BDFIG高电压穿越方法的研究报导较少。
在DFIG的高电压穿越研究方面,文献[4-6]通过增加DC Chopper电路、无功补偿器等硬件设备实现高电压穿越,但增加了硬件成本。文献[7-8]将抑制转子绕组暂态过电流作为关键问题,通过改进转子侧变流器控制策略以抑制高电压穿越期间转子绕组暂态过电流。但文献[7-8]均未提及高电压穿越期间网侧变流器的控制和动态无功支撑能力。文献[9-13]提出合理分配网侧与转子侧变流器无功电流,协同控制实现高电压穿越。文献[9]提出可以通过网侧变流器发出部分无功来对当地电网的无功进行就地补偿。文献[10]提出在高电压穿越期间动态调整变流器母线参考电压的方法以解决现场变流器过压保护导致风电机组脱网的问题。文献[11-13]在高电压穿越期间通过合理分配网侧与转子侧变流器有功、无功提升了风电机组的高电压穿能力。但并未研究如何减小电压骤升故障暂态有功功率的波动。
在BDFIG的高电压穿越研究方面,文献[14]提出一种机侧变流器的控制策略,旨在抑制电网电压发生故障时BDFIG控制绕组的暂态电流冲击。但该方法未考虑电压骤升故障期间网侧变流器可能存在的直流母线过电压问题,并且在故障穿越期间功率绕组有功功率及无功功率外环均断开,使得二者均不可控。
本文对电压骤升时刻笼型转子BDFIG控制绕组暂态电流进行理论推导,说明抑制控制绕组过电流并非解决BDFIG高电压穿越的关键问题。针对现行国标中对并网风力发电机在电压升高期间提供动态无功支撑及有功功率波动的要求,给出网侧、机侧变流器无功电流的分配原则,提出一种降低有功功率波动的方法。仿真和实验结果表明所提控制策略的有效性,且该方法无需附加任何硬件。
1 电压骤升故障BDFIG暂态分析
电网电压发生骤升或骤降故障时,由于功率绕组(power winding,PW)磁链不能突变,控制绕组(control winding,CW)会感应出较大冲击电流。为了说明电压骤升故障时该电流的大小在IGBT的耐受范围之内,抑制控制绕组过电流并非解决BDFIG高电压穿越的关键问题,从BDFIG的数学模型出发,推导电压骤升故障期间BDFIG控制绕组电流的表达式。
1.1 无刷双馈电机数学模型
无刷双馈电机有多种数学模型,由于本文机侧控制策略是在控制绕组静止坐标系实现的,为了方便起见,采用控制绕组静止坐标系数学模型[15]为:
(1)
(2)
(3)
ψp=Lpip+Lprir;
(4)
ψc=Lcic+Lcrir;
(5)
ψr=Lrir+Lprip+Lcric。
(6)
式中:下标p、c、r分别代表BDFIG的功率绕组、控制绕组和转子绕组;U、i、ψ分别为BDFIG三相电压、电流和磁链的合成矢量;R、L为是电机各绕组电阻和电感;pp、pc分别BDFIG功率绕组和控制绕组的极对数;ωr表示转子机械角速度。
1.2 电压骤升故障BDFIG暂态分析
对于笼型转子无刷双馈电机,转子电压为0,即
Ur=0。
(7)
由式(3)~式(6)结合式(7)可得
ic=
(8)
式中▽为微分算子,且▽=d/dt,由于▽-jpcωr远大于式(8)中其它各项,其倒数可以忽略不计,式(8)可以简化为
(9)
结合式(4)、式(5)和式(9)得控制绕组磁链表达式为
(10)
结合式(2)和式(10)可得控制绕组电压为
Uc=Ec+Eψ。
(11)

由式(11)可知,控制绕组电压由两部分组成,Ec为控制绕组电阻与功率绕组等效漏感上的压降之和,Eψ为功率绕组磁链在控制绕组产生的感应电动势。很显然,在电网电压骤升或骤降时,由于功率绕组磁链的变化将导致Eψ变化。
由式(11)可得控制绕组电流表达式为
(12)
式(12)表明,控制绕组电流除了与电机参数有关外,与Uc-Eψ成正比,由于控制绕组电压Uc受直流母线电压大小和直流母线电压利用率限制,变化范围不大,因此故障期间控制绕组暂态电流大小主要与Eψ相关。故以下分析故障期间Eψ的变化。
假设t=t0时,电网发生对称电压骤升故障,σ为电压幅值变化(pu),骤升时取正,骤降时取负。功率绕组静止坐标系下功率绕组电压可表示为:
(13)
式中:ωp为功率绕组电压角频率;|UpN|为电网相电压幅值。忽略式(1)中PW的电阻Rp,并将式(13)代入,根据磁链守恒定律,电网电压对称骤升故障期间,功率绕组αβ静止坐标系下的PW磁链矢量的表达式为:
ψp=
(14)
式中τ为时间常数。结合式(1)、式(2)、式(8)可得
由式(14)可见,故障后功率绕组磁链由稳态分量和暂态分量组成。对ψp求导,可得控制绕组静止坐标系下▽ψp表达式为:
▽ψp=
(15)
式中ωc为功率绕组电压角频率,由式(15)可得,与故障前相比,故障发生时刻(t=t0)时的▽ψp增加或减少的倍数为
(16)
BFGIG的转差率为
(17)
式中ωn为电网电压角频率。结合式(16)、式(17),故障时▽ψp增加或减少的倍数可表示为
(18)
由式(18)可知,K由电压幅值变化σ、转差率S和功率绕组电压衰减时间常数决定。考虑到时间常数带来的影响较小,因此K的大小主要取决于电网电压幅值变化和故障发生时刻BFGIG的转差率。BDFIG的转差率通常设计在-0.3到0.3,对应额定转速的±30%。
我国现行国标中规定的最高电压升高幅值和最低电压跌落幅值分别为1.3 pu和0.2 pu,即σ=0.3和σ=-0.8。当σ=0.3,S=-0.3,即电机最高转速时,由式(18)可得K=-1,式(12)中的Uc-Eψ最大,可能导致的控制绕组暂态电流最大;当σ=-0.8,S=-0.3时,由式(18)可得K=2.67,低电压故障时,式(12)中的Uc-Eψ最大,可能导致的控制绕组暂态电流最大。不难看出,电压跌落80%时的Uc-Eψ很大,因此抑制故障发生时刻BDFIG控制绕组过电流是解决低电压穿越的关键问题[2-3];但电压骤升30%时的Uc-Eψ不大,再考虑到高电压穿越期间国家标准对并网风力发电机提供动态无功支撑的要求,功率绕组将从电网吸收一定量的感性无功功率,从而也可以减小控制绕组的电流,综合考虑以上因素,可以将控制绕组电流限制在IGBT的的耐受范围之内。
综上所述,控制绕组过电流并非无刷双馈电机高电压穿越需要解决的关键问题。本文将研究重点放在电压骤升期间BDFIG提供的无功支持和有功功率的动态响应方面。
2 BDFIG高电压穿越控制策略
BDFIG的功率绕组与电网直接相连,控制绕组通过机侧变流器(machine side converter,MSC)和网侧变流器(grid side converter,GSC)与电网相连。BDFIG系统结构框图如图1所示。
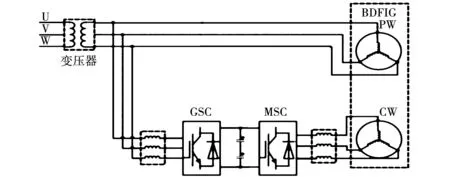
图1 无刷双馈电机系统结构图Fig.1 Structure of BDFIG system
国标中规定电网电压骤升至1.1倍额定电压以上时,电压每升高1%,风电机组至少提供1.5%的额定无功电流。本文通过网侧变流器和机侧变流器对无功电流协调控制,实现BDFIG的高电压穿越。
2.1 网侧变流器控制策略
2.1.1 网侧变流器基本控制理论
网侧整流器的控制系统结构见图2。
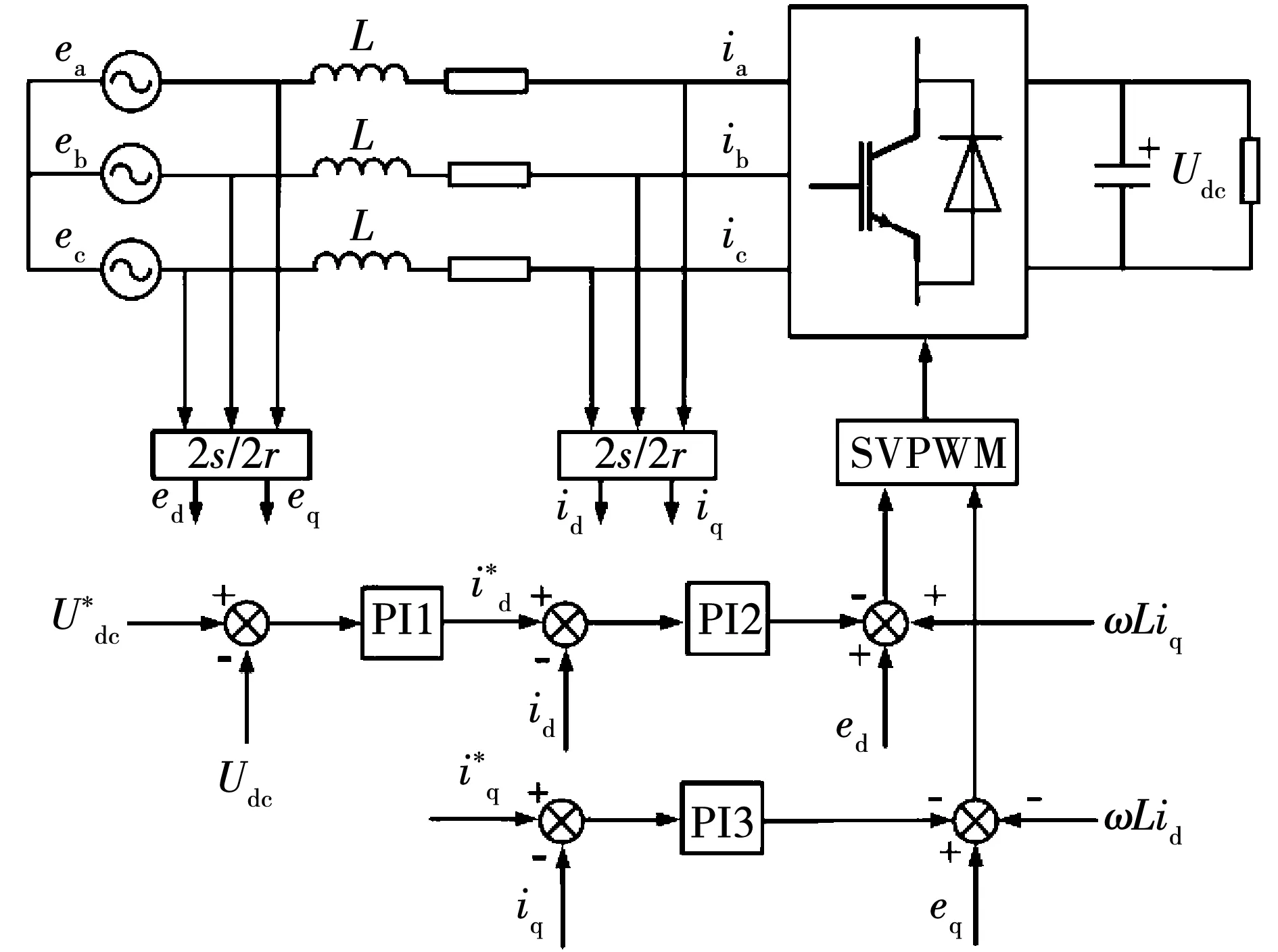
图2 网侧变流器主电路及其控制结构图Fig.2 Main circuit and control structure of grid side convertor
GSC在同步旋转坐标系下的电压方程可描述为:
(19)
其中:Ud、Uq分别为GSC交流侧输入电压合成矢量的d、q轴分量;ed、eq分别为电网电压合成矢量的d、q轴分量;ω为电网电压频率;Id、Iq为电网输入电流合成矢量的d、q轴分量。R、L为GSC进线电阻、电感。
由图2可见,BDFIG正常运行状态时,GSC以直流母线电压Udc为外环,控制内环d轴电流;q轴电流控制为0,工作于单位功率因数。
2.1.2 电压骤升故障期间母线电压及无功电流的动态给定
三相电压型整流器母线电压Udc的给定值要大于进线线电压幅值,这是由Boost升压电路所决定的,否则会使进线电流产生严重的畸变,引入较大的谐波电流。同时母线电压给定值受到器件耐压水平的限制,抬高母线电压必须考虑直流母线电容和IGBT等功率器件的耐压能力。主流型号的风力机组经过低电压穿越能力改造后,母线电容可承受1.3倍并网点额定电压幅值[12],即
(20)
式中UN为电网额定相电压幅值。
由SVPWM理论可知,变流器输出电压矢量的幅值受到直流母线电压的限制,在不产生过调制的情况下,输出电压矢量的幅值和Udc的关系为
(21)
GSC稳定工作状态时,式(19)中的微分量可以不计。采用d轴电网电压定向时Uq=0、Ud=UN,将式(19)代入式(21)整理后可得
(22)
式(22)表明,电网电压骤升期间,GSC从电网吸收感性无功电流(即Iq为负)可以将网侧一部分电压降落在进线电抗器上,从而减小GSC进线线电压,有可能保持母线电压不变。此外现行国标规定电压升高期间,风电机组需要向电网提供容性动态无功支撑。基于上述两方面考虑,高电压穿越期间GSC应在器件耐压水平允许范围内,保证发生有功不变的情况下吸收部分感性无功电流,使网侧变流器短暂工作于非单位功率因数状态来帮助电机完成高电压穿越。
由式(22)可得保持电压故障期间母线电压不变的最小无功电流为
(23)
式中Um为故障期间的相电压幅值。需要说明的是,故障期间在保持网侧变流器输出有功功率不变的条件下,由于电压升高,使得所需有功电流变小,因此进一步增大了网侧变流器发送无功电流的能力,但必须保证不超过GSC的最大允许电流Imax,即
(24)
小功率电机受变流器容量限制,如果所能提供的无功电流小于式(23)计算值,则无功电流按照式(24)选取且需要适当提高故障期间的母线电压,母线电压给定值选取为
(25)
2.2 机侧变流器控制策略
机侧变流器采用了间接功率控制(indirect power control strategy,IPC)[16]。
2.2.1 间接功率控制理论
图3为本文采用的间接功率控制系统的结构框图。如图所示,IPC控制策略分别以BDFIG功率绕组的有功功率Pp、无功功率Qp为外环,控制绕组磁链相角增量ΔXc、幅值增量Ks为内环实现对输出功率的控制以及功率因数的调节[16],电机正常运行时,无功功率的给定为0,电机工作在单位功率因数状态。
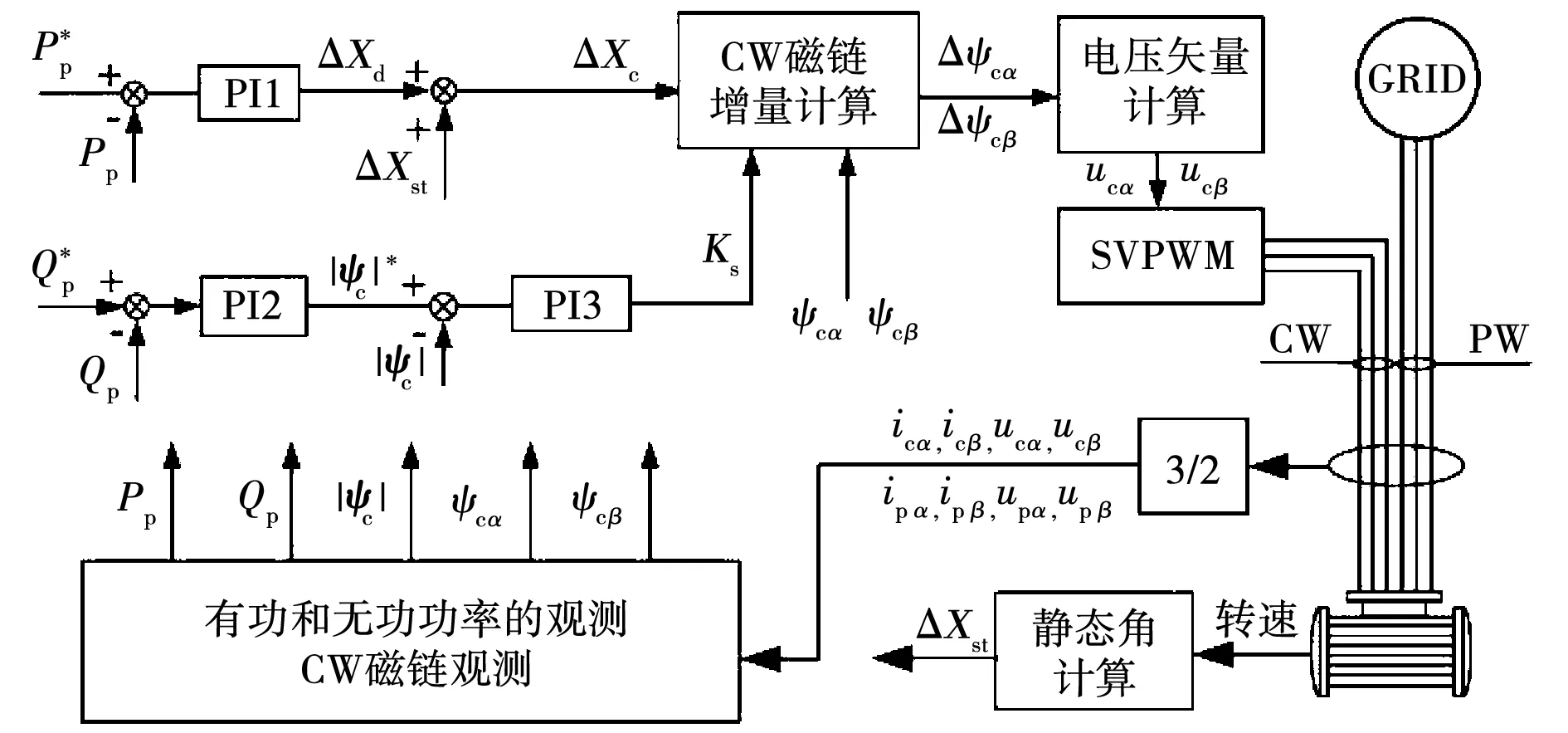
图3 间接功率控制系统结构框图Fig.3 Structure of indirect power control strategy
2.2.2 电压故障期间机侧控制策略
BDFIG有功、无功功率可以表示[16]为:
(26)

由式(26)可见,功率绕组的有功及无功功率与控制绕组的磁链有关,由式(13)可见,电网电压骤升时控制绕组磁链的幅值将大幅增加。由以上可知,控制绕组磁链大幅变化将导致故障开始及结束时有功功率的大幅波动。在保持故障前后BDFIG有功功率给定不变的情况下,改变无功给定即可保持控制绕组磁链幅值故障前后保持不变,进而减小功率绕组有功功率的波动。
令Up=|UpN|ejωct,ψc=|ψc|ej(ωct-θ),代入式(26)中可得:
(27)
(28)
(29)
根据现行国标,电网电压骤升至1.3 pu时,机组至少应提供30%额定无功电流,即
(30)
式中:Iq为网侧给定无功电流;IN为BDFIG额定电流。
值得说明的是,故障期间当功率绕组吸收感性无功功率时,控制绕组电流是减小的,有助于抑制故障期间控制绕组过电流。
综上所述,高电压故障穿越期间BDFIG向电网注入的无功电流由网侧和机侧变流器共同承担。如式(30)所示,其中网侧无功电流Iq由式(23)~式(25)计算,机侧无功电流由式(29)和式(30)计算。
3 仿真验证
为了验证在电网额定电压、机组输出额定功率的情况下,电网电压骤升至1.3倍额定电压时本文所提网侧与机侧控制策略的准确性和有效性,在MATLAB中搭建了仿真模型,仿真中所用BDFIG参数见表1。
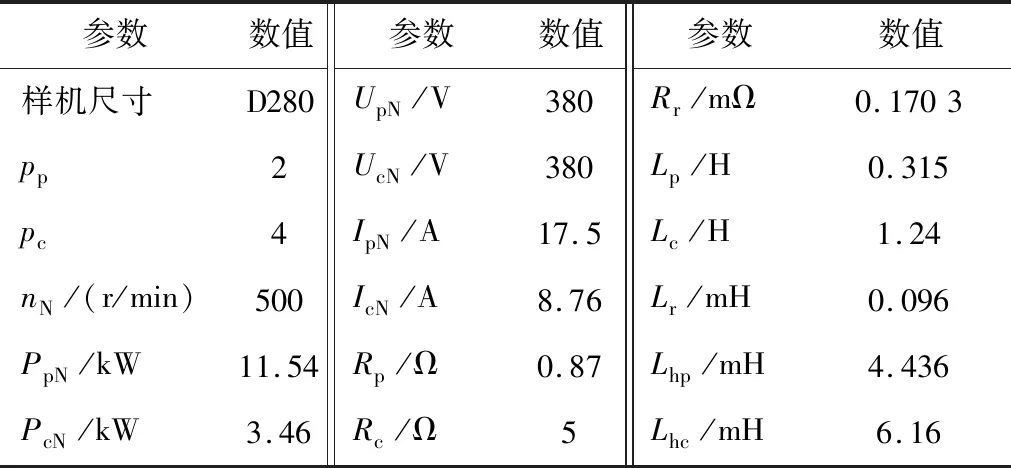
表1 无刷双馈电机参数Table 1 Parameters of BDFIG
正常运行状态时,BDFIG功率绕组有功功率给定为11 kW,无功功率给定为0;网侧无功电流给定为0,母线电压给定为580 V。故障期间,功率绕组有功功率给定不变,无功功率给定由式(29)计算得-9.8 kVar,对应的无功电流为-16 A,以保持磁链幅值不变;考虑到网侧变流器的容量,由式(24)~式(25)得,网侧无功电流给定为-10 A,网侧与机侧无功电流之和满足式(30);母线电压给定为 650 V。
t=1.5 s时,电网电压骤升至1.3倍额定电压,持续时间1 s,仿真结果如图4所示。
图4(a)为无功功率给定为-9.8 kVar时功率绕组有功功率的仿真结果。为了验证故障期间功率绕组无功功率的大小对有功功率波动的影响,在其它条件相同的情况下,图4(b)给出了无功功率给定-3 kVar 时功率绕组有功功率的仿真结果。
由图4(b)可见,故障发生及结束时有功功率的冲击分别为25.5%PN和36.4%PN。由图4(a)可见,故障发生及结束时有功功率的冲击减小为18.2%PN和30.4%PN。仿真结果表明,采用本文所提控制方法有效降低了电压骤升故障发生及结束时刻有功功率的冲击。国标要求电压骤升发生及恢复时刻有功功率波动幅值在±50%PN范围内,故障发生80 ms后有功功率波动在±5%PN范围内,仿真结果满足国标要求。
图4(c)为控制绕组电流波形,故障发生及结束时刻控制绕组暂态电流均小于2倍额定电流。说明抑制控制绕组暂态过电流并非BDFIG高电压穿越的关键问题。
图4(d)为功率绕组无功功率,正常工作时无功功率为0,故障期间为-9.8 kVar。图4(e)为网侧无功电流波形,正常工作时无功电流为0,GSC工作在单位功率因数状态;故障发生后无功电流快速跟随给定变化为-10 A。仿真结果表明,网侧与机侧无功电流之和满足式(30),符合国标要求。
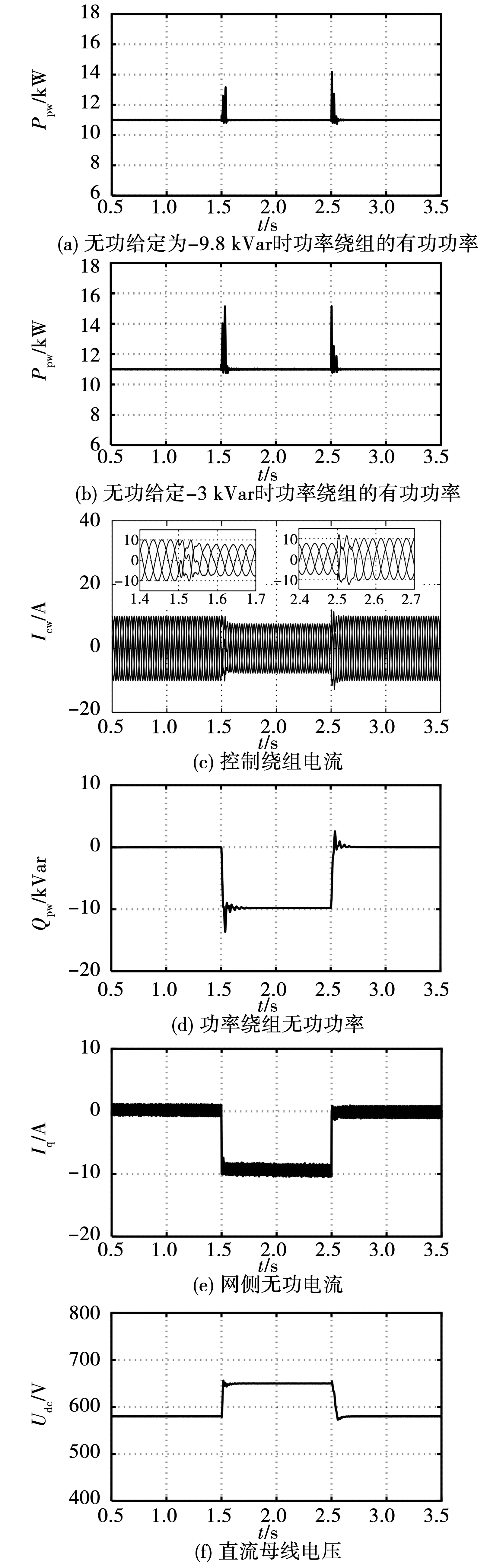
图4 仿真结果图Fig.4 Simulation results
图4(f)为母线电压波形,母线电压在BDFIG高电压穿越期间维持稳定。
仿真结果证明了所提控制策略的有效性。
4 实验验证
为了验证本文所提网侧与机侧控制策略的准确性和有效性,搭建了高电压故障穿越实验装置其原理图如图5所示。电压骤升装置串联于并网点及变压器之间,由PLC控制。实验中采用的BDFIG参数同表1,由西门子变频器驱动的感应电动机拖动。功率绕组和控制绕组的接法同图1,实验装置见图6。
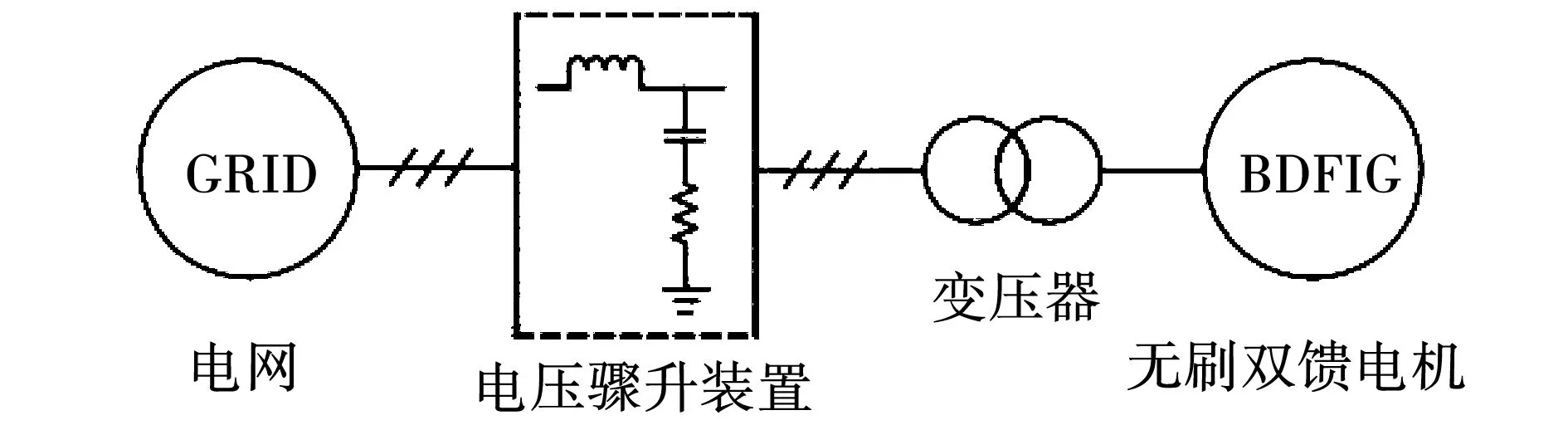
图5 BDFIG高电压穿越测试原理图Fig.5 Test schematic diagram of HVRT for BDFIG
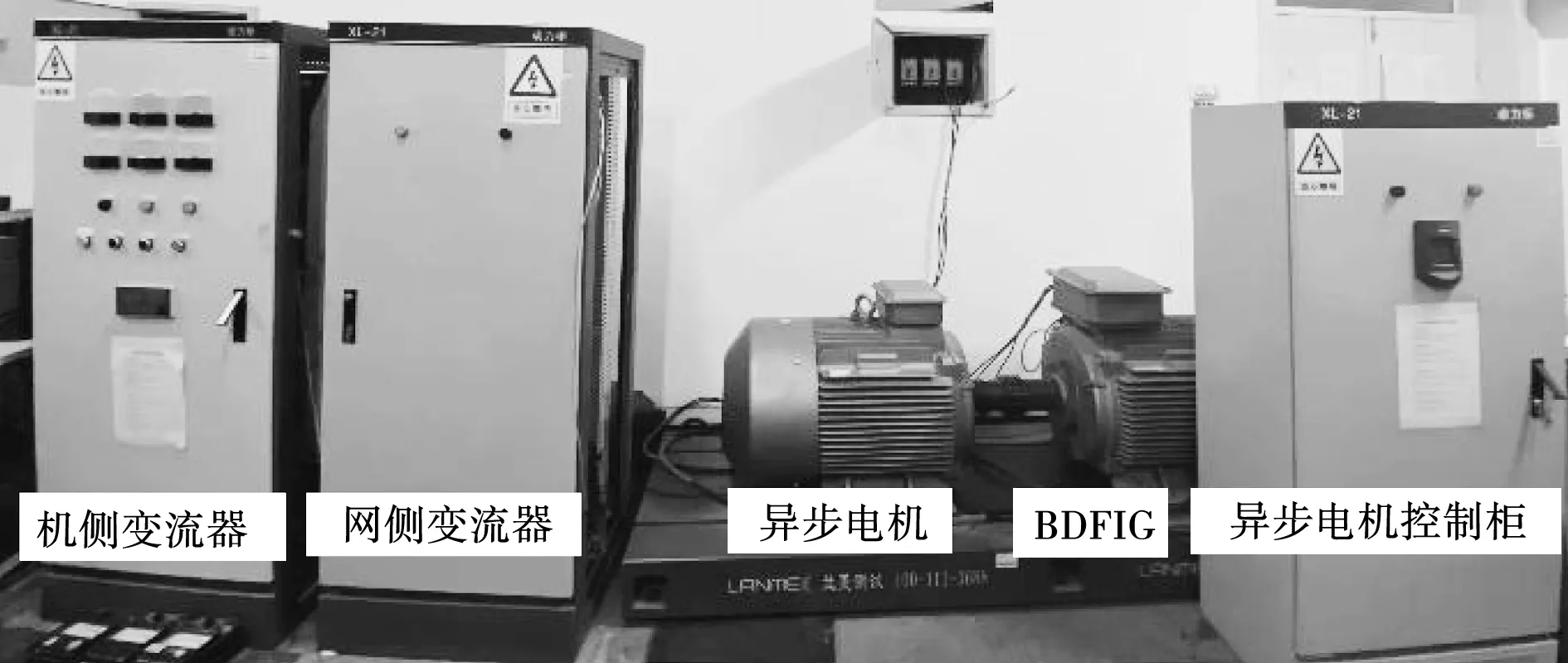
图6 实验平台图Fig.6 Experimental system platform
考虑到网侧和机侧变流器中IGBT的安全性,将正常运行时BDFIG的线电压降为额定电压的84.2%,幅值为450 V,在此基础上,由高电压发生装置在并网点产生1.3倍的对称电压骤升,幅值为585 V,如图7所示,t=1 s时故障发生,t=1.95 s时清除,持续时间0.95 s。
正常运行时功率绕组有功功率给定为2.4 kW,以检验BDFIG在国标测试内容中规定的风电机组小功率输出范围内对电压故障时的响应特性,无功功率给定为0;网侧无功电流给定为0,母线电压给定为480 V;故障期间功率绕组有功功率给定不变,无功功率给定为-6 kVar,对应的无功电流为-11.8 A,以保持磁链幅值不变。考虑网侧变流器的容量,由式(24)、式(25)得,网侧无功电流给定为-12 A,网侧与机侧所发无功电流满足国标要求,母线电压给定为540 V。
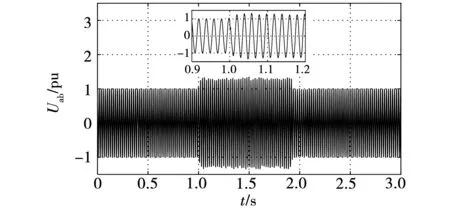
图7 并网点线电压Fig.7 Voltage of grid connection point
图8为功率绕组有功功率的实验结果,为了验证故障期间功率绕组无功功率的大小对有功功率波动的影响,在其它条件相同的情况下,图8中同时给出了无功功率给定分别为-6 kVar和-2 kVar的实验结果。
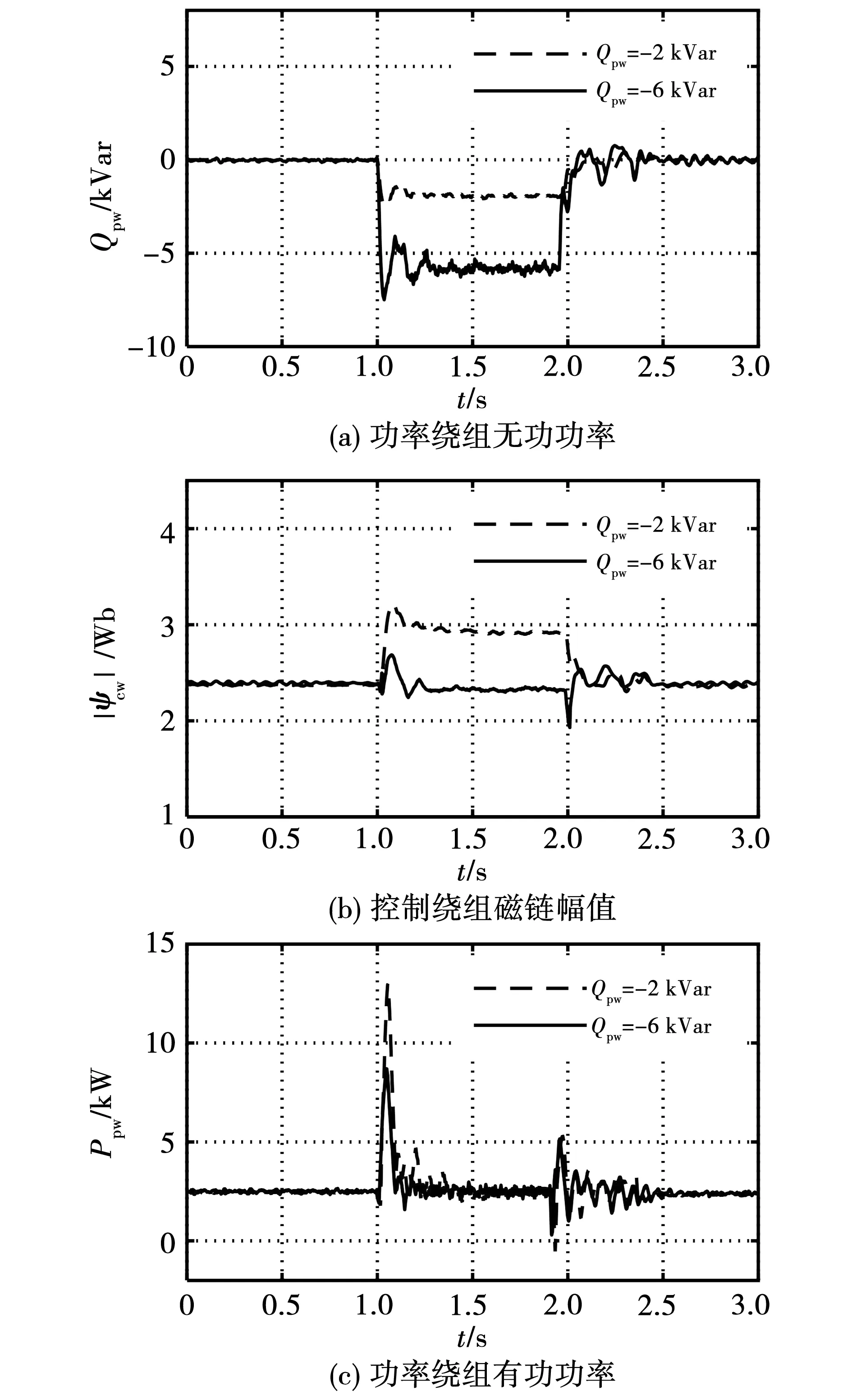
图8 无功给定-2 kVar和-6 kVar的实验结果Fig.8 Experimental results of reactive power given at -2 kVar and -6 kVar
由图8可见,功率绕组无功功率给定为-2 kVar时,故障发生后控制绕组磁链幅值由2.4 Wb变化为2.9 Wb,故障发生及结束时有功功率的冲击分别为12.8 kW和5.3 kW;无功功率给定为-6 kVar时,故障期间磁链幅值基本未变,故障发生及结束时有功功率的冲击分别减小为8 kW和4.2 kW,大大减小了功率绕组有功功率的波动。实验结果表明,采用本文所提控制方法可以有效降低电压骤升故障发生及结束时功率绕组有功功率的冲击。
图9为BDFIG发出的总有功功率,即功率绕组与控制绕组有功功率之和。正常运行时为3 kW,故障发生及结束时最大冲击值分别为8.5 kW和5.5 kW,波动幅值在±50%PN范围内,故障发生80 ms后波动在±5%PN范围内,实验结果满足国标要求。
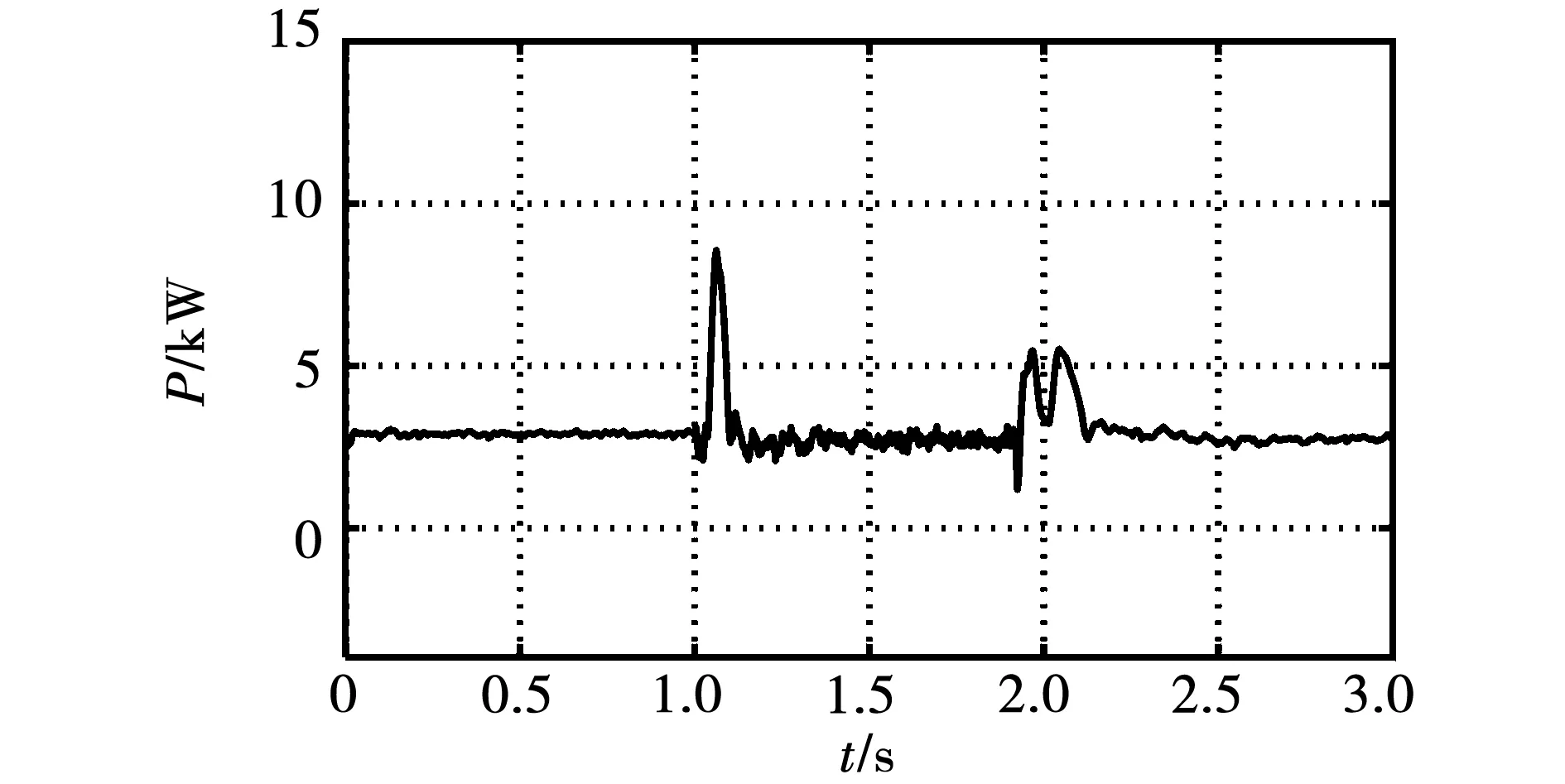
图9 BDFIG总有功功率Fig.9 Active power of BDFIG
图10为控制绕组电流,由图10可见,故障发生及结束时,暂态电流均小于2 pu,说明抑制控制绕组暂态过电流并非BDFIG高电压穿越的关键问题。
图11(a)为网侧变流器进线电流,正常运行时电流幅值为1.5 A,其交轴和直轴分量分别为Iq=0,Id=1.5 A。故障期间网侧电流峰值约为12 A,其交轴和直轴分量分别为Id=1.2 A,Iq=-12 A,与给定值相符。
综合图8(a)与图11(a)的实验结果,网侧与机侧提供的无功电流之和大于0.3倍额定电流,无功支撑能力满足国标要求。
图11(b)为直流母线电压,故障前后母线电压均可保持在给定值附近。
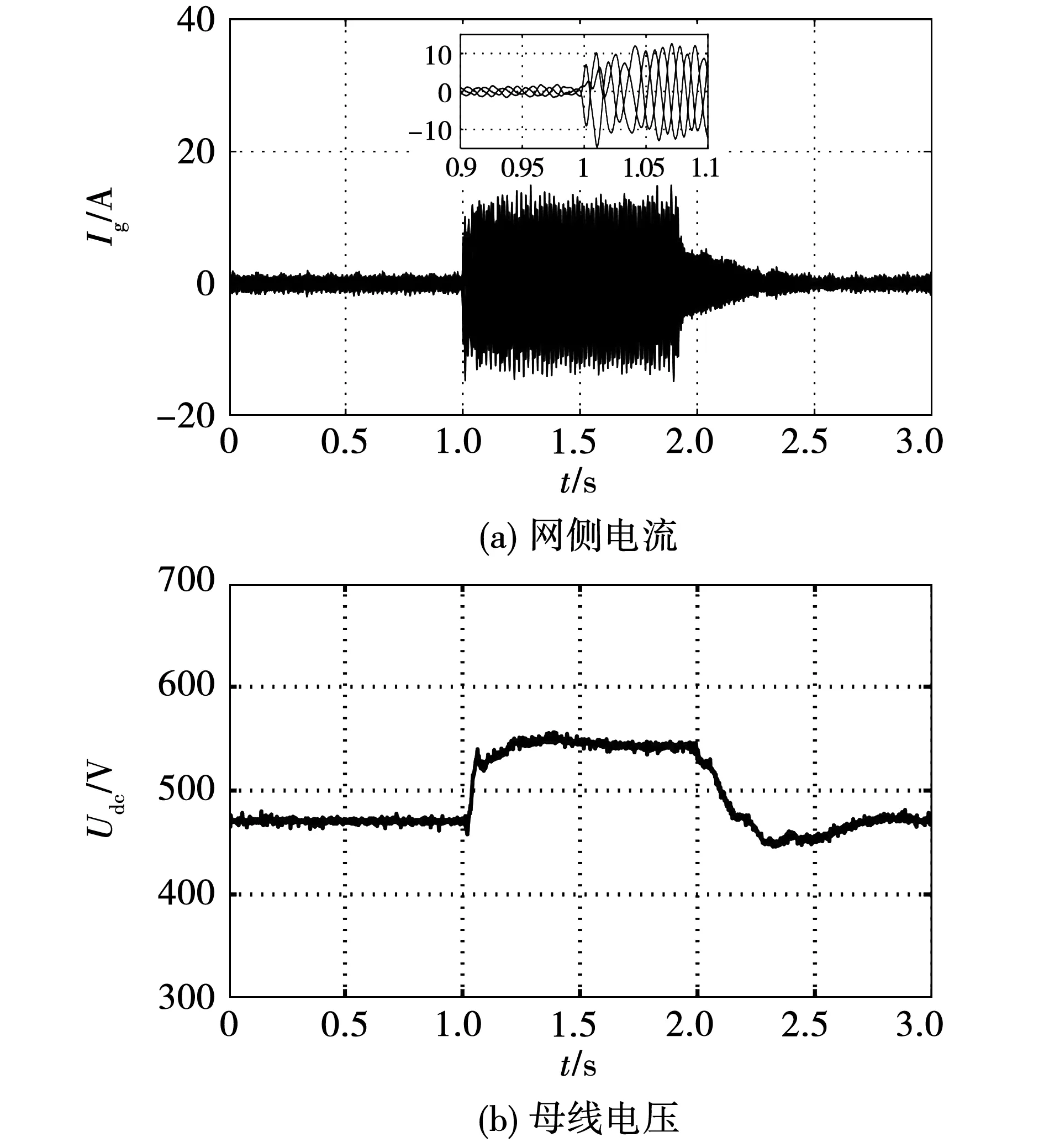
图11 网侧电流和母线电压Fig.11 Current of grid side and bus voltage
实验结果表明,所提网侧与机侧协同控制策略可以满足高电压故障穿越期间风电机组所应提供的无功支持,并将有功功率的波动幅值控制在允许的范围之内。
5 结 论
本文提出了一种无刷双馈电机网侧与机侧协同控制的高电压穿越控制策略,通过分析得到以下结论:
1)抑制控制绕组过电流并非无刷双馈电机高电压穿越需要解决的关键问题。仿真及实验结果均表明,故障期间控制绕组暂态过电流均在机侧变流器短时可承受的范围之内,验证了理论分析的正确性。
2)给出了故障期间保持输出有功功率不变条件下网侧与机侧变流器无功电流的分配原则。考虑电网电压骤升幅度和网侧变流器容量,给出了网侧变流器无功电流给定值的计算方法。在保持故障前后控制绕组磁链幅值不变的条件下,给出了机侧无功功率(或无功电流)给定值的计算方法,该方法有效减小了故障时有功功率的波动。仿真与实验结果验证了采用所提控制策略的有效性,无需附加任何硬件可使BDFIG在保证变流器安全的条件下实现高电压故障穿越。
猜你喜欢
能源与环境(2022年5期)2023-01-10
科学技术创新(2021年21期)2021-07-30
铁道机车车辆(2021年3期)2021-07-12
科技信息·学术版(2021年7期)2021-01-10
微特电机(2020年11期)2020-12-30
电子制作(2019年10期)2019-06-17
课程教育研究·学法教法研究(2018年20期)2018-08-11
中国设备工程(2017年24期)2017-12-28
电子制作(2017年1期)2017-05-17
中国新技术新产品(2014年4期)2014-01-24