应急通信下无人机能效优化
2023-01-06 09:40周婉旭翟亚红崔峻玮贺权吕勇
湖北汽车工业学院学报 2022年4期
周婉旭,翟亚红,崔峻玮,贺权,吕勇
(湖北汽车工业学院电气与信息工程学院,湖北十堰 442002)
随着自然灾害事件数量的不断增加,应急通信需求迅速增长[1]。受灾地区的通信基础设施经常面临不同程度的毁坏甚至完全无法工作,导致通信中断,因此应急通信对灾后及时救援意义重大[2]。无人机(unmanned aerial vehicle,UAV)凭借其抗干扰能力强、可移动、小巧灵活、可操作、成本低等优势被国内外专家学者广泛应用于应急通信中,用于替代被破坏的基站,极大地提高系统的可扩展性,解决受灾地区通信受限的问题[3-6]。徐马蒙等人[7]提出了基于传输速率最大梯度变化的移动策略,通过改变移动策略,提高UAV的转发数据量,降低单位数据量消耗的能量,提升UAV执行任务的效率。但该方案仅考虑了UAV 和蜂窝网络用户(cellular network user,CU)架构,并不适用于应急场景。郝立元等人[8]研究了基于UAV 的无线通信系统的节能优化策略方案。作者根据控制传感器发射功率达到降低能耗的目的,但在此方案中作者只利用单个UAV 进行数据传输,无法满足多用户密集任务下的需求。作为单UAV 的补充,姚维等人[9]针对多UAV协同执行任务过程中计算量大和能耗高的问题,提出了多UAV 自适应任务卸载方案。At‑eya[10]等人提出了UAV 卸载算法,但建模时没有考虑实际情况中信道的周期性变化。Le Liang[11]等人在V2V(vehicle to vehicle)应用场景中对通信过程建模时考虑了信道的周期性变化,但没有将此理论延伸在UAV 的应用场景中,不能满足实际通信需求。文中针对应急场景下多UAV通信传输速率低和能耗高的问题,提出了应急通信下优化多UAV能效的方案;对CU和UAV相互协作形成联盟的过程进行建模分析,将此过程分为CU 分组过程和UAV频谱资源分配过程;设计了CU联盟形成算法和联盟形成算法,使用仿真实验验证了该方案的可行性和有效性。
1 系统模型
应急场景下的多UAV 通信系统模型如图1 所示。由K个CU、Q架UAV 和1 台远端基站(base station,BS)组成。为了解决本地BS 受损无法工作的问题,通信数据可以转发到具有计算能力和通信能力的UAV,由UAV 转发到远端BS。假设CU 在受灾地区随机分布,UAV 基于博弈论的资源分配方式决定是否转发CU 数据[12]。将K个CU 分成N组,然后为每组用户分配1 架UAV 进行通信。同时假设UAV 与远端BS 间通信的频谱是固定分配的,此段频谱不会被共享。每个分组内的所有用户共享UAV 的同一段频谱与本组的UAV 通信,其中1个用户只能属于1个分组,1个分组只能被分配1架UAV与远端BS进行通信。
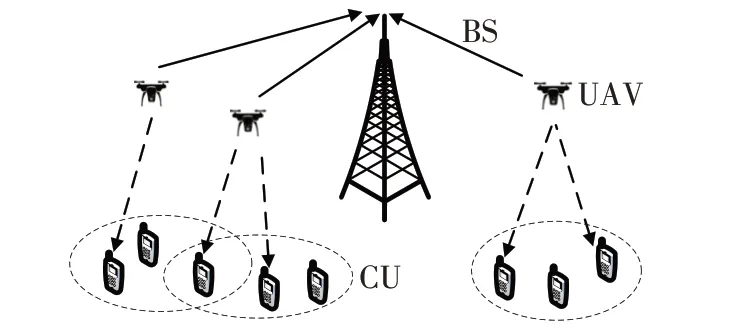
图1 应急场景下多UAV通信系统模型
1.1 通信过程建模
假设远端BS 位于地平面,高度为0,系统模型的位置坐标固定不变。系统内的UAV群在上空盘旋飞行,受灾区域的CU 位于地面。由于通信过程中所产生的干扰一般是针对接收端,与发送端无关,所以在CU 与UAV 间及UAV 与BS 间的双向通信过程中,仅考虑UAV发送数据到BS和UAV回传数据给CU的单向通信过程。
1)UAV 与BS 通信过程建模 根据文献[13]提出的UAV与BS间的视距通信理论,应急通信的系统模型中UAV与BS间的信道增益为
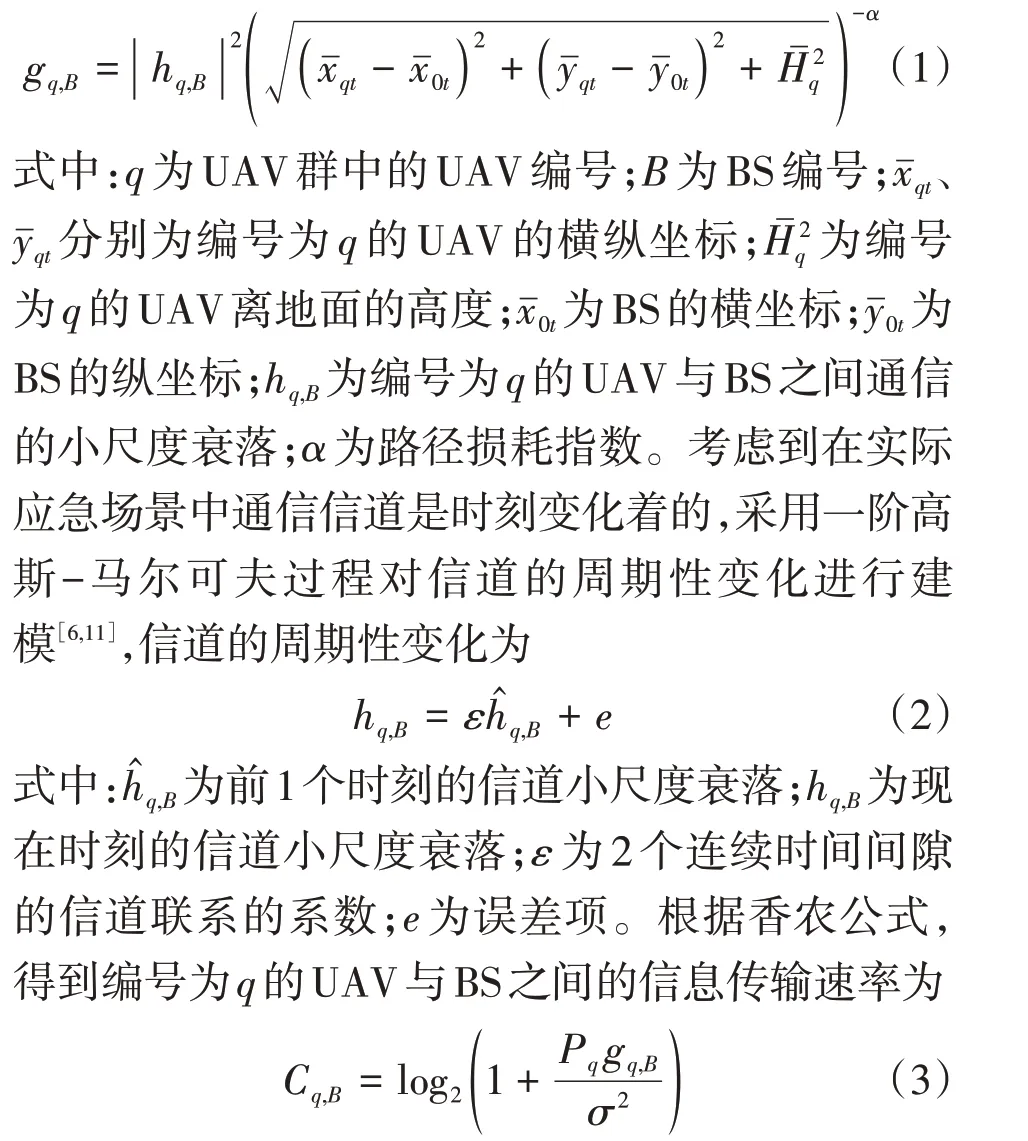
式中:Pq为UAV发射功率;σ2为噪声功率。
2)UAV 与CU 通信过程建模 UAV 与CU 间链路的信道增益和信道的周期性变化与UAV与BS通信的表示方式相似。由式(1)~(3)推出UAV 与CU之间的信息传输速率为
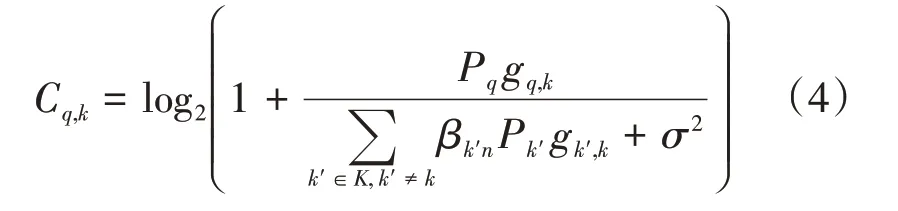
式中:k为CU群的CU编号;k′为除了k以外的其他CU;n为CU 分组中的某个分组;βk′n为k′是否属于分组n的关系表示;gq,k为q与k通信的信道增益;Pk′gk′,k为系统内所有的其他编号为k的CU 对编号为k′的CU干扰。
1.2 能耗过程建模
对于UAV 而言,接收数据所产生的能耗相比转发数据和回传数据产生的能耗小得多,所以忽略UAV 在通信过程中接收数据的能耗。通信过程中,UAV与BS通信所产生的能耗为

式中:Tq,B为编号为q的UAV转发数据到BS所需要的时间。UAV与CU通信所产生的能耗为

式中:Tq,k为编号为q的UAV转发数据到为编号为k的CU 所需要的时间。UAV 在整个通信过程中按照规划路径飞行,产生飞行过程能耗[14]为

式中:λ为飞行损耗系数;v为UAV的飞行速度。优化UAV能效的模型为
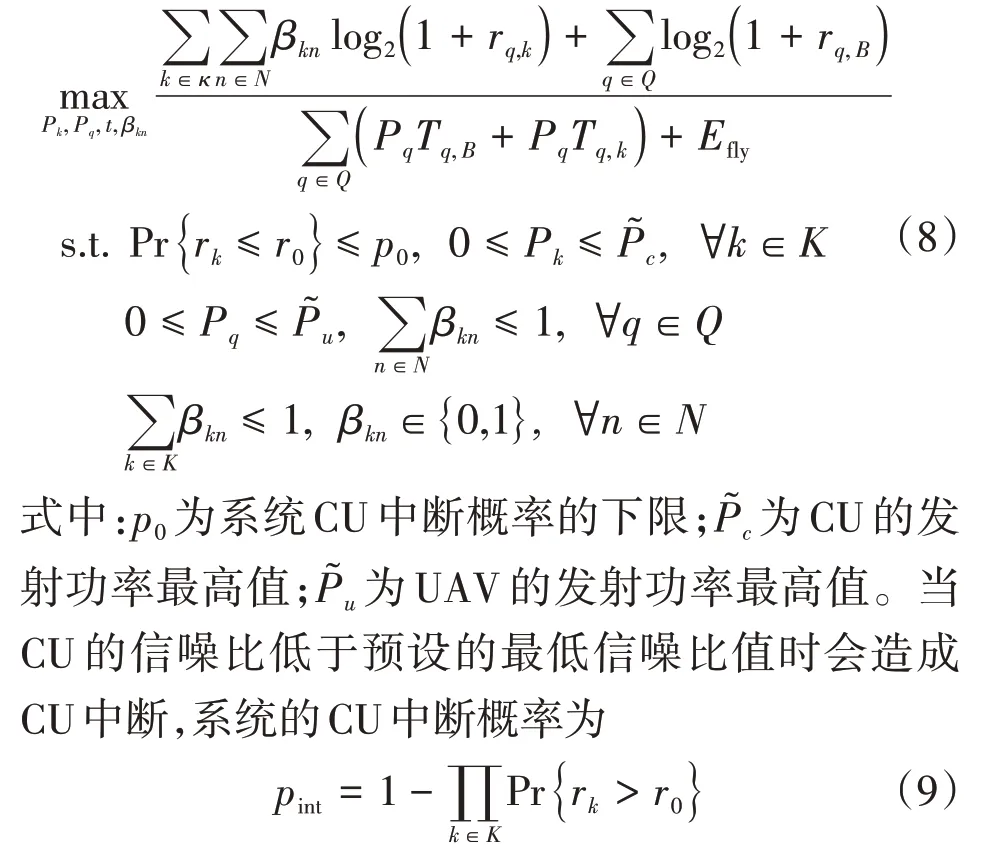
式中:rk为编号为k的CU 的信噪比;r0为系统预设的最低信噪比。
2 基于博弈论的资源分配策略
利用联盟形成博弈对CU 的频谱资源分配进行数学建模。对于CU 分组,采用联盟策略将干扰较大的CU 划分为不同的组,使同组内的CU 共享同一个UAV 的同一段频谱。在可重用的UAV 频谱资源中,利用联盟博弈为每组CU 选择合适的UAV,同时最小化所选UAV对各个CU分组的干扰。
2.1 CU分组
在此部分中,将CU 分组问题建模为可转移效用的联盟博弈[15]。CU为博弈者,分组结果为联盟。对于所有CU,只能加入其中1个联盟。编号为k的CU 接收到来自同一联盟内其他编号为k′的CU 的总干扰越小,其对联盟的个体贡献值越大。联盟Cn的效用函数为
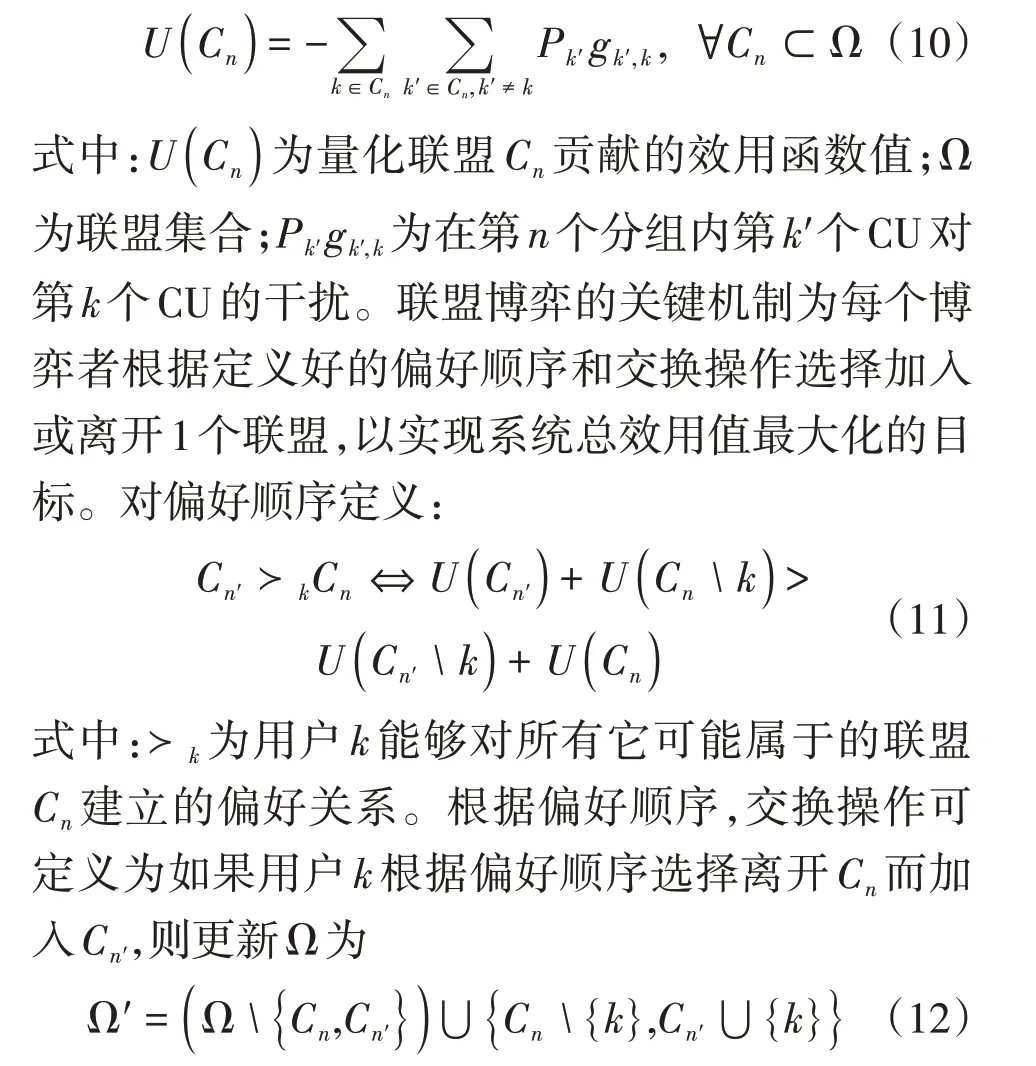
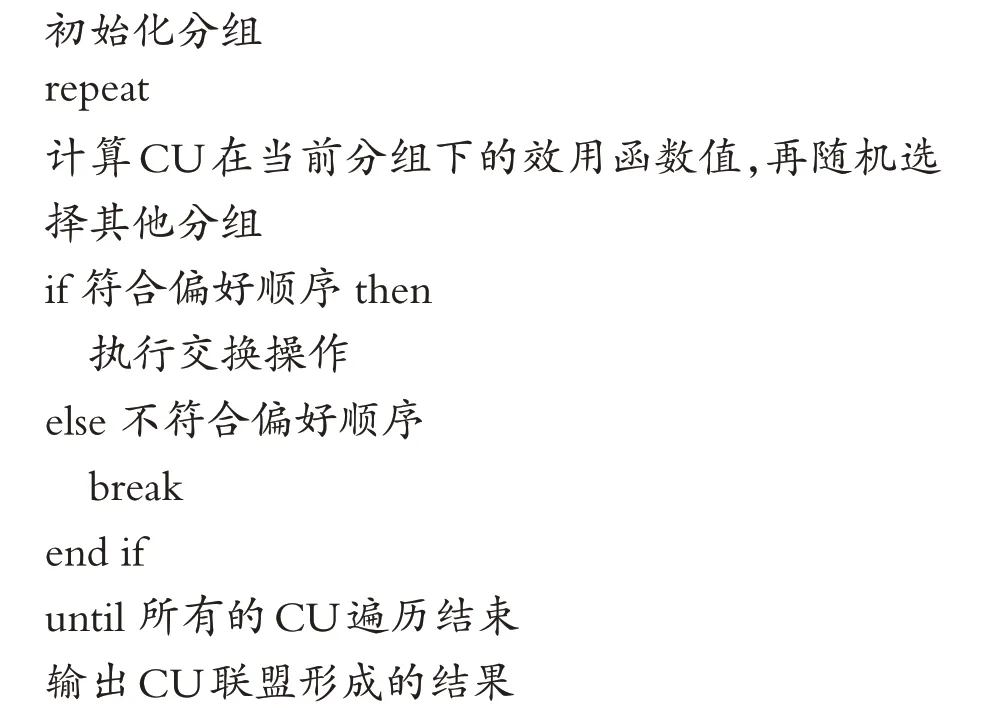
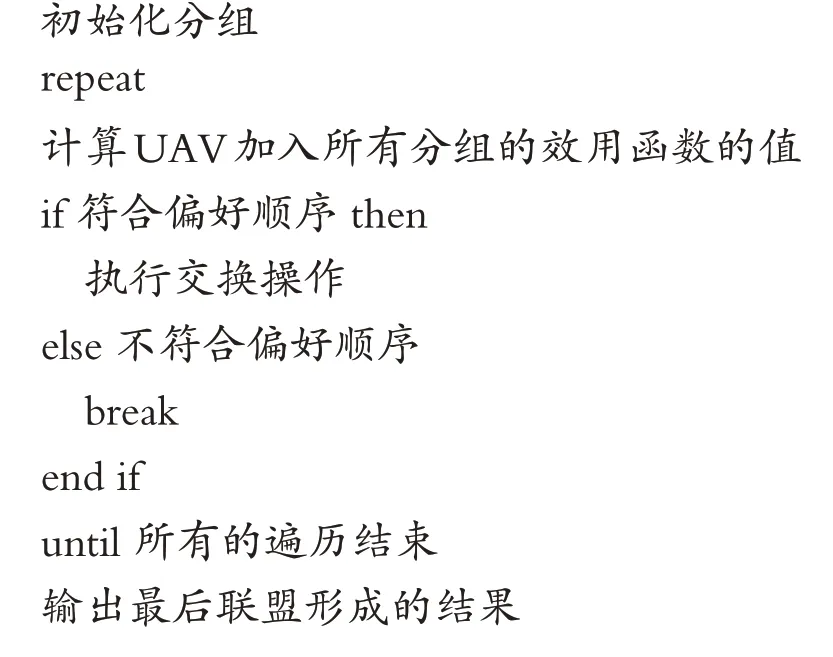
基于联盟形成博弈分析,提出CU联盟形成算法。
2.2 UAV频谱资源分配
将可重用的UAV 频谱资源分配问题建模为1个可转移效用的联盟博弈,选择合适的UAV 加入已经分配好的CU 的联盟。系统中所有UAV 为博弈者,分组集合为联盟。远端BS为每个CU的联盟选择1 个UAV,剩余的UAV 加入辅助联盟CN+1。UAV的效用函数为

式中:Q为所有UAV 集合;N为所有CU 联盟集合。对偏好顺序为

式中:≻q,q′为编号为q的UAV能够对所有它可能属于的联盟Cn建立的偏好关系;sn为某个联盟;sn′为除了sn外的其他联盟。根据上述偏好顺序,交换操作定义为如果编号为q的UAV 根据偏好顺序选择离开联盟Cn加入联盟Cn′,更新当前的Ω̂为
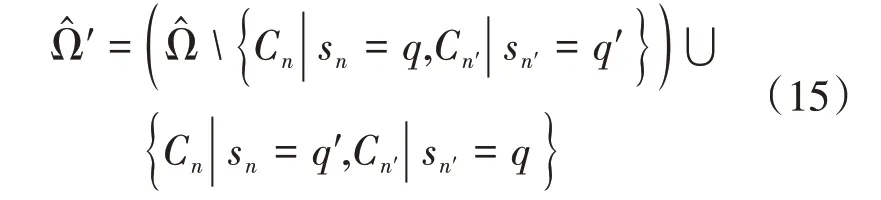
基于联盟形成博弈分析,提出UAY联盟形成算法。
3 仿真分析
为验证所提算法的效果,给出了基于博弈论的资源分配策略和其他策略的对比结果。仿真的主要参数如表3所示。图2描述了在8 km×8 km被测区域内,3架UAV和10台CU终端组成的应急场景实例。CU 终端随机分布在被测区域,其位置在一定时间内保持不变,UAV 在飞行同时执行与远端BS和CU的通信任务。
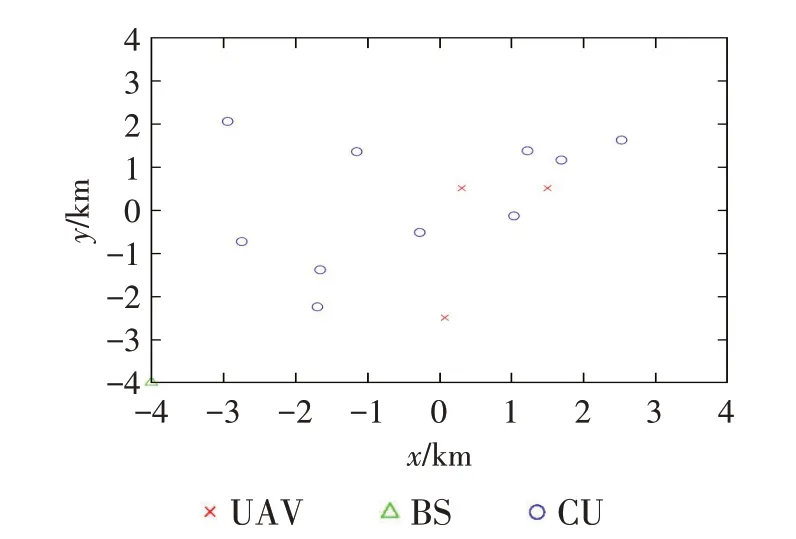
图2 3架UAV和10台CU组成的实例
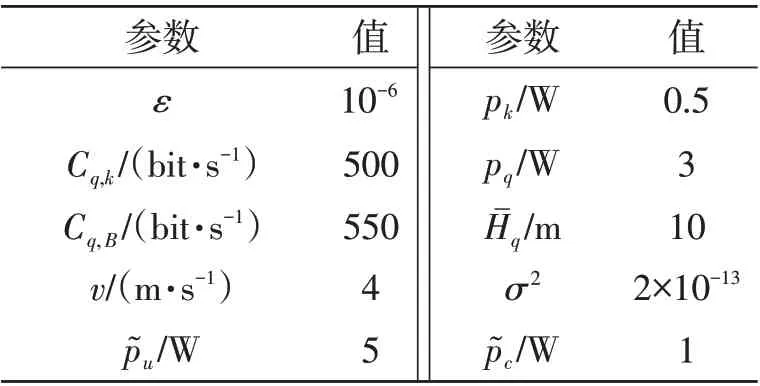
表3 仿真主要参数
图3a 为在10 台CU 终端下,随着分组数量增加,不同策略下的系统传输速率变化情况。文中提出的基于博弈论的策略标记为策略A,CU 与BS 通信的策略标记为策略B,CU 与UAV 通信的策略标记为策略C。随着分组数量的增加,基于策略A的总信息传输速率越来越高,当分组个数为10时,策略A的传输速率达到432 bit·s⁻¹,策略B的传输速率为374 bit·s⁻¹,策略C的传输速率为365 bit·s⁻¹。图3b 给出了在10 台CU 终端下,随着分组数量增加,不同策略下UAV 总能耗的变化情况。基于移动边缘计算策略标记为策略D。根据图3b可以看出,策略A的UAV总能耗最低,当分组个数为8时,UAV 总能耗降低到2139 J;策略D的UAV 总能耗降低到2372 J;策略C的UAV的总能耗为3176 J。
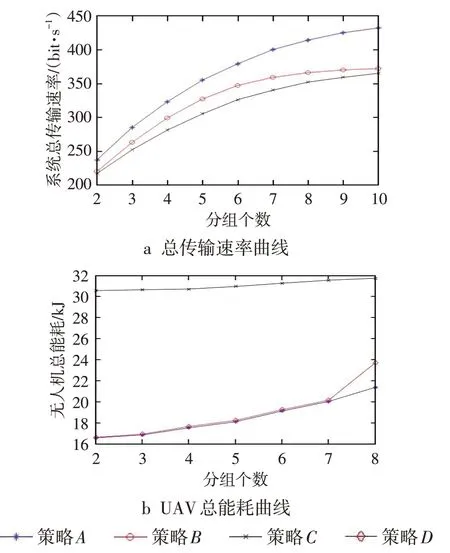
图3 不同策略下的总传输速率和UAV总能耗曲线
4 结论
针对应急通信下优化UAV 能效的问题,用1阶高斯-马尔可夫过程对信道的周期性变化进行建模,CU 和UAV 相互协作形成联盟,设计基于博弈论的CU 联盟形成算法和联盟形成算法。相较于其他的典型策略,基于博弈论的策略能够在有效降低系统UAV 能耗的同时提高信息传输速率,实现UAV的能效优化。
猜你喜欢
空间科学学报(2021年6期)2021-03-09
英语文摘(2020年10期)2020-11-26
中国计算机报(2020年15期)2020-05-13
计算机系统应用(2018年7期)2018-07-18
智富时代(2018年3期)2018-06-11
智富时代(2018年3期)2018-06-11
计算机应用(2016年10期)2017-05-12
绿色科技(2017年2期)2017-03-23
移动通信(2017年3期)2017-03-13
CHIP新电脑(2016年9期)2016-09-21