
一种电力巡检机器人自主越障系统设计
2023-01-05 03:44池毓菲张美锋黄子博王怀祥
电气技术与经济 2022年6期
池毓菲 张美锋 黄子博 王怀祥
(1.福建华电可门发电有限公司 2.华电电力科学研究院有限公司)
0 引言
随着科技的发展和生产的发展,人们对智能机器人的研究也日益深入。电力系统的发展使得机器人应用成为迫切需求,电力系统的发展离不开输电线路的支持,架空输电线路长期处于裸露状态,受外界环境的影响,不仅要承担较大的负载,而且要经受外部的侵害,从而导致线路长期处于各种异常状态[1]。为此,需要对高压输电线路进行监测,以确保电力系统安全稳定运行。采用巡检机器人,不但可以高效地完成此种作业,还可以通过对作业过程中的行为进行规划,并根据实际情况自动产生相应作业指示,从而实现对作业自动控制。针对目前的各种多变环境,传统的机器人无法适应各种越障要求,本文提出一种电力巡检机器人自主越障系统。
1 电力巡检机器人自主越障系统结构设计
1.1 自主越障控制器结构
机器人的避障控制系统主要是利用LabVIEW技术,将获得的多个数据进行整合,并进行数据集成。然后利用LabVIEW对数据进行综合处理,最后将数据传送给微控制器模块。采用CAN总线进行数据传输,经过微分驱动方式,控制电机向不同方向前进,进而实现对巡检机器人姿态角的控制,达到躲避的目的[2]。自主越障控制器主要功能是自由地向前、后、左、右四个方向运动,并且在运动过程中,根据计算的距离、位置对所经过的障碍物进行躲避。利用光电编码器对机器人的运动轨迹进行跟踪,达到对机器人运动位置定位的目的[3]。
1.1.1 上、下位机结构设计
自主越障的电力巡检机器人上、下位机是控制器的核心结构,其中上位机使用的是一种RS232串行通讯线缆,该线缆直接与下位机相连,负责数据交换。在上位机中安装一个激光测距仪,该仪器负责自主越障数据采集、控制、数据分析结果显示,通过显示内容控制移动机器人。计算机的主要作用是对计算机的数据进行分析和判断,并对下位机发出控制命令[4]。
1.1.2 机身爬行臂结构设计
目前架空高压输电线路巡检机器人主体结构主要包括爬动臂和承载探测设备的主体,爬行臂的结构也是由不同的机械结构决定的。因此,使用一种三臂机器人,该机器人体型大、作业空间大,可以克服很多困难。另外,三臂伸缩性更好,能携带更多的电力,因此能提高机器人巡检效率。三臂巡检机器人通过障碍时,其平衡块向后运动,由转动机械带动的电缆脱离,中、后肢沿着一条直线行进,使前臂通过障碍,实现前臂越障。如图1所示的对称三臂的一只手臂的示意图,其手臂是一个带有偏心基座的双连杆平面机械手。通过假设机器人导线在避障过程中刚性连接,可以通过对流生成单臂的运动学参数。因此,机器人手臂的运动学和动力学建模可以简化为仅避障阶段。当前臂克服障碍时,把平衡块调节到巡检机器人箱体的中部[5]。中臂下降以躲避障碍,然后继续前进直至中臂越过障碍。后臂重复前臂越障机理,完成整体越障。
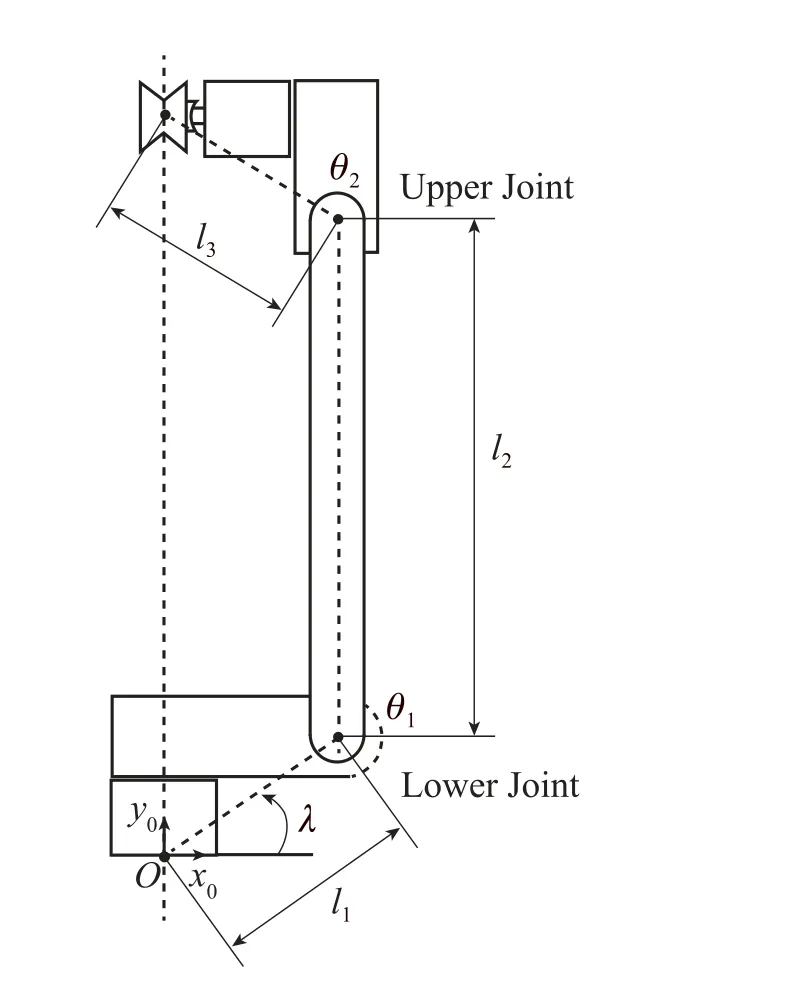
图1 一种基于单臂的三臂机器人建模示意图
1.1.3 恒力矩夹持机构
机器人在巡检过程中难免会遇到爬坡问题,因此,爬坡能力成为衡量机器人稳定巡检的一项重要指标。对于提高巡检机器人爬坡能力主要有两种措施,一种是增加机器人行走轮和线路之间的摩擦力,另一种是增加机器人自身重力。通常情况下,巡检机器人都是采用增加自身重力的方式,在每一个移动轮的下面设有两个夹持轮,每一个夹持轮通过旋转轴与机械手连接,从而可以上下移动,完成夹持和松脱的操作。充分考虑轮子过分夹紧会导致行走轮轮槽与地面之间摩擦增大的问题。因此,使用一种双夹紧的轮子结构,使巡检机器人在爬坡时能够适应线路角度的变化。
为了保证机器人在爬坡过程中的稳定性,必须将夹持轮移至副轴的位置,从而实现动力的平衡。通过机器人本身的倾斜度传感器来提高机器人的两臂高度差,从而可以计算出机器人的直线角,确保机器人在穿越障碍物时始终处于平稳状态。
1.2 自主越障感应传感器
自主越障感应传感器主要包括两种,PAR传感器和TSR传感器,对于这两种传感器的功能如下所示。
(1)PAR传感器
PAR传感器易于使用,可以在全天候使用,并且可以与数字伏特计的数据采集装置直接相连,其主要功能是测量400~700nm的自然光的光合作用。
(2)TSR传感器
TSR传感器的运动基准装置能够满足不同静态和动态条件需要,其主要目标是高精度、高可靠性地检测障碍物。V形导向滚子是一种带有一体化测量放大器的球轴承的张力传感器,它能够输出多种类型的信号,包括模拟、数字(可选)、电流(可选)、模拟DMS(可选),是一种具有机械防护的张力传感器,便于操作者对所述定制的材质进行校正,并可用于不同的辊子。
2 电力巡检机器人自主越障功能设计
随着我国电力系统日益依赖电力网络,电力系统的运行可靠性问题日益突出。通过采用机器人对高压输电线路进行巡检,可以降低巡检人员的劳动强度(见图2)。同时还能对某些人工巡视的盲点进行有效地探测,从而保证电缆的安全、可靠,保证输电线路正常运行。

图2 智能巡检机器人
2.1 电力巡检机器人自主越障行为控制
由于机器人在障碍时受到多个可控多个节点的干扰,使得其动作过程变得更加复杂,从而使其难以进行操作。由于机器人自身依赖的关节运动轨迹在线规划是一个非常复杂的任务,为了使其具有更好自动越障能力,需要事先制定好离线操作规划,然后根据操作顺序进行自动越障。然而,由于障碍物种类繁多,且其真实的姿态难以预料,因而难以准确地进行越障运动。因此,采用线上与线下的方法,结合现有脱机计划,针对实际状况,对障碍越障行为进行合理在线规划,以达到一种流畅越障行为。采用生成式系统的层次规划方法,以达到机器人越障行为规划目的。计划的实施可分为行为层面和动作层面两个层次。其中行为层面并不直接对关节进行控制,而需要完成诸如前肢脱线、越障等行为命令;动作层面不同于行为层面,主要是执行机构的活动关节驱动,并对电机运行方向、速度、停止等进行控制。通过在行为层面上进行规划,利用行动序列知识库对所规划的宏指令进行解释,产生一系列的关节动作,完成对机器人运动控制。这种方法可以有效地解决很多不确定的离线规划问题,同时也可以避免在线上进行复杂的规划操作,从而使机器人能够更好地完成对障碍的控制。
2.2 电力巡检机器人自主越障姿态角调整
在越障机器人的越障规划中,姿态调整是一个非常关键的环节,它可以保证系统的安全、稳定,保证机器人在越障过程中的重心分布均匀,也可以保持手臂的力量均衡,以确保越障时的稳定。要越过障碍物,机器人必须一个机械臂挂在空中,另一个机械臂从电线上穿过障碍物,并使臂架能够移动到障碍物的另一侧,从而越障(见图3),然后才能重新回到线上。该系统在线工作时,采用了重心调整机构,使机器人的运动保持稳定。为了实现机器人的脱机,必须保证辊子和架空接地线之间不能有强烈的交互作用。
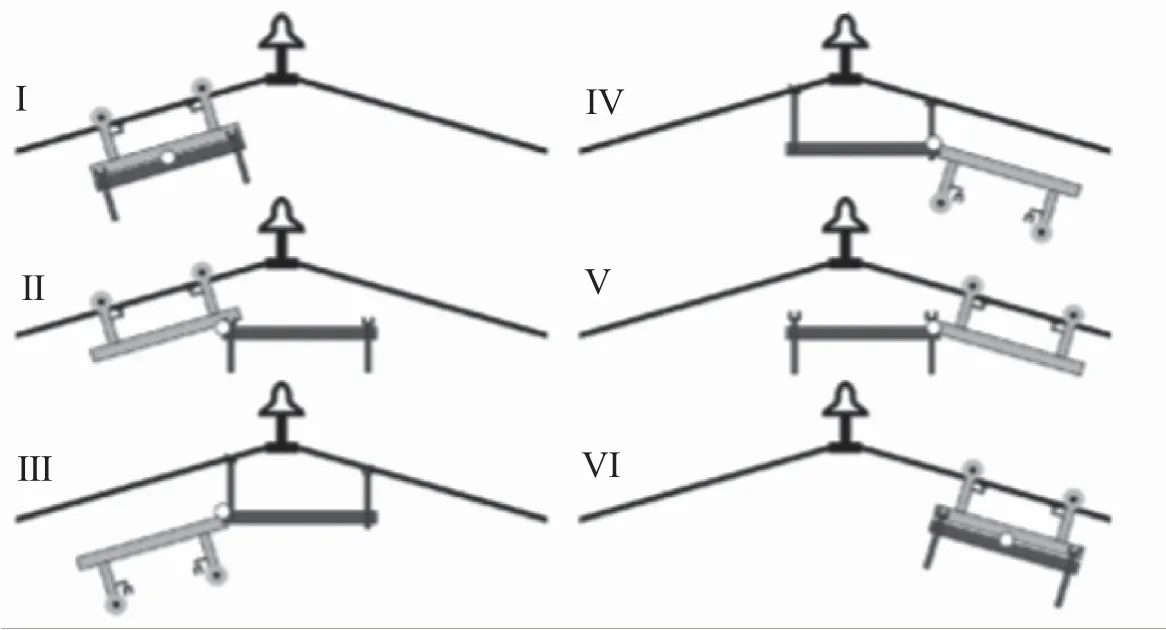
图3 机器人越障过程
对于机械臂上线定位控制步骤为:在进行臂部上线运动定位时,由于现场线路的风向以及自身姿势的调整,导致出现摇摆后,必须不断地进行调整,从而延长了定位操作的时间。通过计算滚筒、扶手、架空线的相互关系,调节机械臂的姿势,使其能够迅速地实现在线操作,从而提高工作效率。将一个机械吊在空中,另一个机械臂完成自动越障,然后再重新回到地面,得到另一个机械臂、夹爪和滚轮的角度偏差,由此完成上线操作。
3 案例分析
通过对高压输电线路的测试,发现导线金具可以有效地保护高压线路,并在导线上设置相应的导线金具。机器人在进行线路检测时,难免会碰到一些障碍,如金属刀具。在巡线机器人越障作业中,如何合理地完成巡线作业是其关键环节。目前,利用机身重力使行走轮与绳索间产生相对摩擦,使其能够沿着一条直线行进。当遇到障碍时,这些机器人很可能会导致机身失去平衡,在一些大角度的线路上会发生打滑现象。为了确保机器人在越障时的稳定,并在行走轮下面加入夹具,从而提高了作业的安全性和可靠性。在输电线路上常用的几种导线金具,从外形上看,可以看出有相同的地方,即都是长条形,且平行于轴线和线缆,其中尺寸最大的为防震锤。
本文通过对机器人在架空接地线上的撞击击打作为实例,对其越障进行分析:
阶段一:由左至右的巡检机器人,靠近右冲撞锤的轨道臂叫做前臂,而左边的轨道臂叫做后臂。这时,机器人在直线上行进,两个夹紧装置处于松弛状态。当机械人靠近撞击锤子时,机械臂上的测距感应器会发出讯号,使机械手停止运动,进行下一步的越障。
阶段二:机器人在接收到右臂前的感应器信号时,就会停止动作,由夹持机构的滚珠丝杠带动夹持缆索上升,再由前臂气钳带动一周完成动作,并分别围绕主动轮和主动轮行走,机器人围绕缆索行走。
阶段三:后臂夹紧装置夹住钢索,使其保持身体的稳定。通过俯仰机构的运动,使机器人的前臂竖直运动,而行走轮则下降,直至绕过障碍为止,这个距离被一个用于控制前臂的下降传感器监测和反馈。
阶段四:当前臂脱离了缆线时,机身通过行走轮和后臂夹持装置,使身体保持平稳。之后,后臂行走电机会将行走轮向前推,直至前轮越过防震锤,机器人在后臂上的感应器探测到防震锤时就会停止运动。
阶段五:机器人的前臂越过障碍物,再由电动推杆推动其向前运动。前臂重新上线,直至感应器确认缆线并越过缆线。
阶段六:当机械臂通过障碍时,前臂行走轮会进行闭合动作,再次夹持由空气钳驱动的钢索,前臂夹持机构将滚珠螺杆带动的钢索夹住,以实现前臂越障。
巡线机器人完成了一套前端爬行臂的越障动作,然后机器人后端爬行臂又重复了与前端爬行臂越障相同的动作,由此完成机器人整体的越障。
根据上述内容,将传统系统与自主越障系统的避障效果进行对比分析,结果如下表所示。

表 两种系统避障效果对比分析
由表可知,当障碍物静止时,使用传统系统最高避障效果为50%,使用自主越障系统最高避障效果为98%;当障碍物动态时,使用传统系统最高避障效果为46%,使用自主越障系统最高避障效果为95%。
为了验证机器人的稳定性,采用可调节角度的仿真回路,并利用角度补偿恒力矩保持器的夹持力,对不同方向的机器人进行越障试验。
(1)稳定风作用
由于风在方向的随机性,在稳定风荷载作用下,由于其本身的自重和摩擦作用,其沿风向和竖直方向均比机械臂小,而在沿轴向风向最大时,则会出现一个挠度。当巡检机器人在检测线缆时,若机身摇摆或倾斜角太大,会使相机无法聚焦,造成巡检图像模糊不清,从而影响检测效果。通过在机架的底板上加装角度传感器,设定适当最大倾角,在预设值以上时,机架上的风向会产生很大倾角,在风压强情况下,机架倾角可以被实时地调节,夹持机构由马达带动夹持缆索,增大沿轴摩擦力,减小风对机器人工作性能影响。
(2)脉动风作用
脉动风的风速是随着时间推移而变化的,为了分析脉动风对机器人稳定性影响,必须对其进行动态分析。由于脉动风的存在,使机器人产生了风振效应,从而使机器人能够在风的作用下继续工作。另外,当机器人的摇摆幅度超出设定值时,通过夹紧机构夹持缆绳,使其不能继续运动,从而保证了机器人线上作业安全性。
4 结束语
巡线机器人的越障作业是一种非常复杂的作业,在作业中会发生很多无法预料的状况。因此,基于边缘特征的提取,可以实现电力巡检机器人的自动越障,从而达到自动越障的智能行为。该系统不但适合于巡逻机器人的自动越障,同时对于一些控制量大、控制逻辑复杂的控制系统也有一定的参考价值。机器人自动避障是一种非常重要的、有效的智能控制方式,该系统可以根据模拟试验的结果,对各种技术参数、设计思想、规则进行优化,具有很强的灵活性。
猜你喜欢
实用手外科杂志(2022年2期)2022-08-31
动漫界·幼教365(中班)(2020年3期)2020-04-20
铁道通信信号(2020年9期)2020-02-06
创新作文(1-2年级)(2019年4期)2019-10-15
建材发展导向(2019年5期)2019-09-09
电子制作(2018年10期)2018-08-04
电子制作(2018年12期)2018-08-01
科学之谜(2018年5期)2018-07-26
山东工业技术(2016年15期)2016-12-01
