面向双天线场景的惯性辅助周跳探测方法
2023-01-01 00:00:00李枭楠周俊杨思佳张弘贾鹏
数字通信世界 2023年4期





摘要:在卫星导航接收机跟踪载波信号过程中,经常会由于树木房屋遮挡等原因导致周跳发生。针对双天线组合导航的场景,参与组合的惯导姿态信息若能充分利用,可以对周跳探测提供更为精确的辅助信息。文章提出一种INS/载波相位组合法,通过惯性测量信息辅助周跳探测与修复,进而缩短导航信号失锁时间,提升卫星导航系统性能,优化组合结果。
关键词:周跳;探测;双天线;惯导
doi:10.3969/J.ISSN.1672-7274.2023.04.007
中图分类号:TP 3,TN 96" " " " " " " "文献标示码:A" " " " " " " "文章编码:1672-7274(2023)04-00-05
Inertial Assisted Cycle Slip Detection Method for Dual-Antenna Scenario
LI Xiaonan1, ZHOU Jun2, YANG Sijia3, ZHANG Hong4, JIA Peng4
(1. The 54th Research Institute of CETC, Shijiazhuang 050081, China; 2. Research Institute of Army Aviation, Army Aviation School, Beijing 247100, China; 3. Beijing Satellite Navigation Center, Beijing Haidian, 100094, China; 4. Naval Representative Office, Shenyang 110000, China)
Abstract: In the process of tracking carrier signal by satellite navigation receiver, cycle slip often occurs due to the occlusion of trees and houses or other reasons. In the scenario of dual-antenna integrated navigation, attitude information of the inertial navigation system can be fully utilized to provide more accurate auxiliary information for cycle slip detection. This paper proposes an INS/Carrier Phase Combination Method, which assists cycle slip detection and repair through inertial measurement information, thereby shortening the time of navigation signal loss-of-lock, improving the performance of the satellite navigation system, and optimizing the combination result.
Key words: cycle slip; detection; Dual-Antenna; inertial navigation
0" 引言
在接收机跟踪载波信号过程中,经常会由于树木房屋遮挡、过隧道等原因产生信号失锁。在接收机重新捕获信号时,计数器的整周计数是不连续的,存在一个整周偏差[1]。若在长时间失锁后重新捕获,可直接利用模糊度解算方法进行定位[2][3]。但在暂时失锁情况下,原有模糊度仍然具有一定参考意义,可针对一定的检测方法进行修正即可。此外,在长时间跟踪信号中,也可能产生整周跳变的现象。这就需要针对周跳进行探测与修复的研究[4][5]。
目前常用的周跳探测修复方法主要分为三类:多项式拟合法、伪距/载波相位组合法和电离层残差法[6]。多项式拟合法适合静态场景,动态场景准确率大大降低。伪距/载波相位组合法是利用伪距在观测中连续的特点实现周跳检测,但伪距误差较大会导致小周跳不易探测。电离层残差法是利用电离层延迟相对稳定的特点,观测双频下载波相位差,精度较高,但无法探测特定情况下的周跳。本文针对双天线组合导航场景,提出一种INS/载波相位组合法,利用惯性测量信息辅助探测周跳,并结合电离层特性进行探测值的校验,此外对探测误差进行分析,指出该方法对惯性测量器件的精度要求,最后进行跑车实测分析,探测效果良好。
1" INS辅助周跳探测法
1.1 双差观测方程建立
双天线定位定向是指对载体上固定的两个天线接收的导航信号进行差分处理,解算出天线间基线矢量,进而得到载体姿态信息。双天线组合导航场景,可利用惯性测量信息辅助接收机环路进行周跳探测及修复。
首先应根据双天线场景建立双差观测方程,并利用已有条件改进方程模型。假设载体上架设有天线A和天线B,两天线同步观测到卫星i和j,卫星i和天线A之间的载波相位非差观测方程分别为
式中,δtA为天线A对应的接收机钟差;δti为卫星i的卫星钟差;P、p分别为接收机端和卫星端的初始相位(小数部分);以天线A作为主天线,天线B为副天线,在天线A、B对卫星i的观测值之间作差,记,可得载波相位的站间单差观测方程为
通过单差后,电离层延迟I和对流层延迟T得到削弱。在卫星i和j之间再进行一次差分,可得载波相位站星间双差观测方程为
由于多天线GNSS场景中,主、副天线都是固连在载体上的,且天线间的基线长度一般为几米。而I和T在短距离内误差接近,因此对于这种超短基线情形,I和T经过双差后可以基本消除。对于初始相位P,其整数部分可归到模糊度N,小数部分归为接收机间载波相位硬件延迟偏差。由此,双差载波相位观测方程可简化为
在相同频点下,载波波长设为,并令双差载波相位,双差整周模糊度,则上式可简化如下:
1.2 惯性信息利用
由于惯性导航系统是一种纯自主导航方式,不受外界干扰,短时精度高、连续性好,可以利用惯性器件推算载体位置与三维姿态,利用其连续性对周跳进行探测及修复。相比伪距观测量,惯性测量信息在短时间内精度很高[7][8],理论上相比伪距/载波相位组合法探测效果更良好。
假设利用惯性器件推算的当前载体位置为,三维姿态角为,卫星i位置坐标为,其中e表示地心地固坐标系ECEF,惯性导航系统推算的载体姿态为东北天坐标系(n系)下的姿态角,航向角α以北偏西为正。天线A到卫星i的观测方向为
对于超短基线来说,由于天线A、B之间距离远远小于天线A或B到卫星i之间的距离,因此也可视为天线B观测卫星i的方向。根据几何关系可知,天线A、B间基线矢量与单差真实几何距离关系为:
则双差真实几何距离为:
两个天线间基线长度是确定的,假定基线矢量方向与载体朝向一致,利用惯性推算的载体姿态,可得到参考基线矢量为
注意,为东北天坐标系下的基线,需转化为地心地固坐标系。当地经度记为,纬度记为(弧度为单位),则基线需先后绕X轴和Z轴经过两个欧拉角转换到地心地固坐标系,相应旋转矩阵分别为
地心地固坐标系下基线矢量为:
由此可利用惯性测量器件推算的天线对卫星观测方向,以及天线间基线矢量,得到推算的站星间双差几何距离。记,将推算值带入双差载波相位观测方程,变换可得:
相邻历元作差,得三差整周模糊度为:
在无周跳情况下,,因此可取探测检验值如下:
设探测阈值为,则无周跳下应满足:
若探测到有周跳,可将取整作为修复值,即:
由于在双差观测方程中,电离层延迟已经基本消除,因此在多频数据下可以利用电离层残差法进一步检验探测结果。利用上面三差模糊度方程式,在不同频率下作差,可以消除,得到四差方程:
对修复值、的检验可以采取如下校验值:
通过不同频率间关系检验无周跳情况v≈0。通过以上INS与载波相位相关法的探测和双差观测值下的电离层残差法的检验,可以消除几乎所有周跳。
1.3 探测误差分析
下面分析惯性测量误差对探测结果的影响。以探测阈值取四倍中误差为例,若想探测1周内的小周跳,需要满足:
即需要满足如下条件:
以GPS L1频点为例,=19.02 cm,有:
设基线误差矢量为,基线真实值为,即有:
可得如下关系:
式中,为载波相位测量噪声,考虑到载波相位测量精度很高,可以将其忽略,且有:
设基线真实值与测量值间的角度差为(单位弧度),由于角度很小,近似有如下关系:
可知,在满足如下要求的情况下,完全可以保证能探测到1周的效果:
以基线1米为例,对姿态角误差(弧度)有如下要求:
即在基线1米的场景下,若惯性测量推算的姿态角在1秒内能满足误差在1.375°以内时,可以保证能探测到小至1周的周跳,且对惯性测量器件的精度要求与基线长度负相关。
2" 跑车实测分析
搭建车载平台实验环境,在测试车体上搭设两架天线,天线间基线长度经过初始化测量为2.535 m。采用组合导航接收机测量车体动态运行中的位置和姿态,在市区道路环境中进行跑车测试,采集卫导原始观测数据和惯性测量信息进行处理,将本文提到的INS/载波相位组合法与常规的伪距/载波相位组合法进行对比,并用电离层残差法对周跳探测修复结果进行检验,分析探测效果。
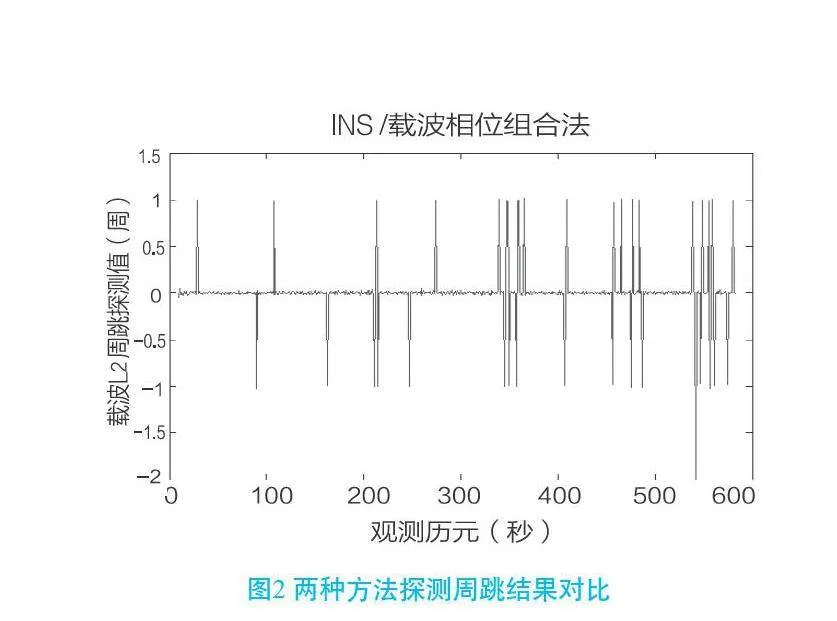
实验中根据高度角选取G27卫星为参考卫星,利用其与G7卫星间的双差观测量对周跳探测修复结果进行分析。在卫导原始观测数据中随机挑选历元加入了共计95个1~3周的小周跳。如图2所示,分别为伪距/载波相位组合法与INS/载波相位组合法对以上卫星的L1与L2载波计算的双差周跳探测值。从图2中可以看出,由于INS姿态误差相比伪距观测噪声小得多,导致利用INS/载波相位组合法得到的周跳探测值更平滑且更接近整数。
统计以上两种方法的周跳数,见表1。由表1可知,利用伪距探测到的周跳历元数更多,这是由于伪距观测噪声较大(尤其是观测初期),使系统将噪声误判为周跳导致的。
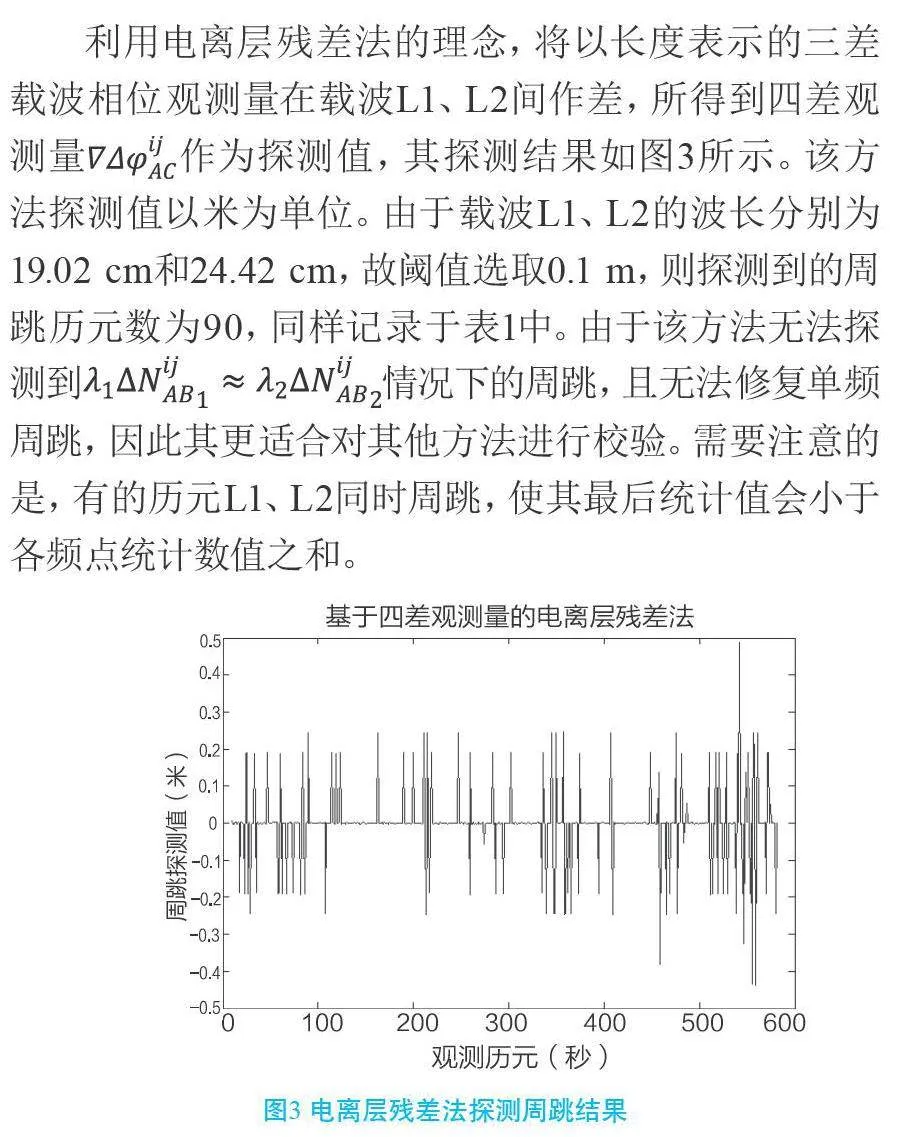
利用电离层残差法的理念,将以长度表示的三差载波相位观测量在载波L1、L2间作差,所得到四差观测量作为探测值,其探测结果如图3所示。该方法探测值以米为单位。由于载波L1、L2的波长分别为19.02 cm和24.42 cm,故阈值选取0.1 m,则探测到的周跳历元数为90,同样记录于表1中。由于该方法无法探测到情况下的周跳,且无法修复单频周跳,因此其更适合对其他方法进行校验。需要注意的是,有的历元L1、L2同时周跳,使其最后统计值会小于各频点统计数值之和。
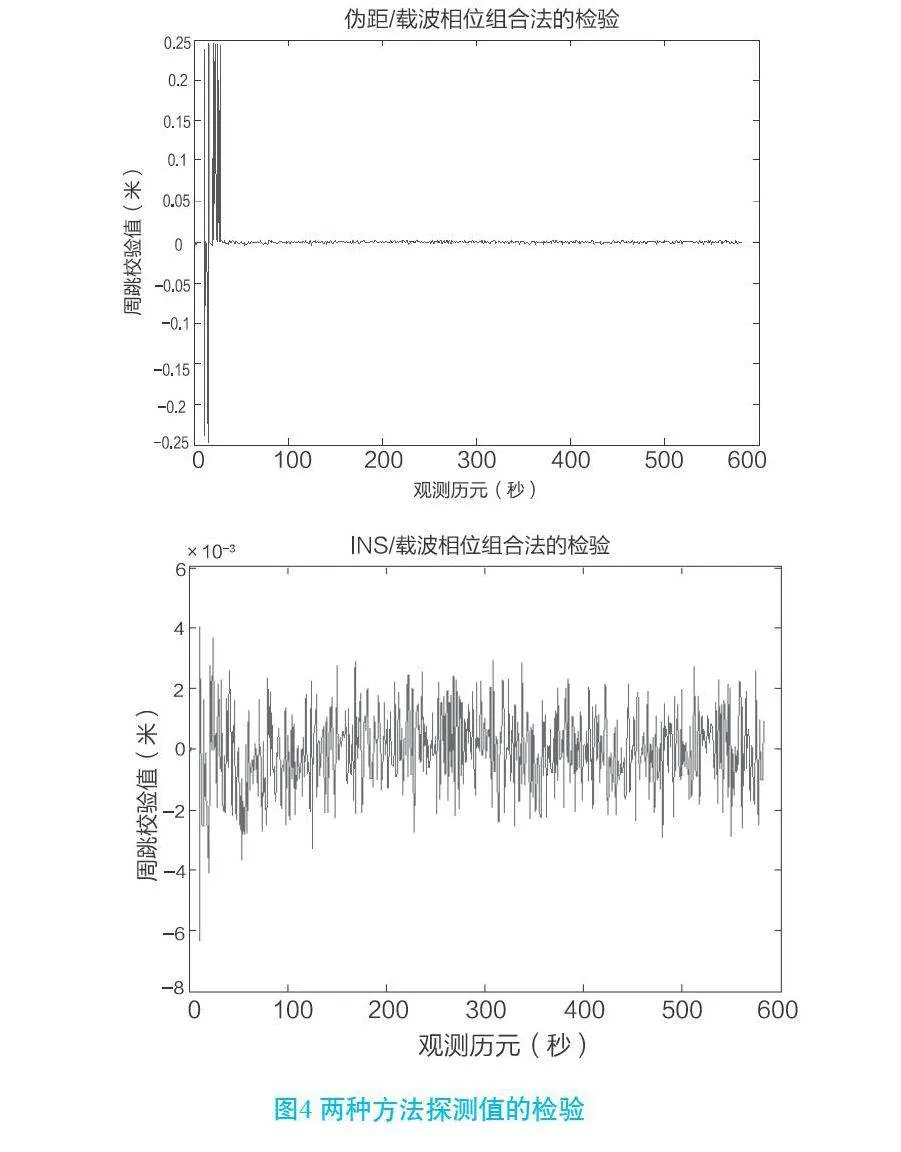
下面将伪距/载波相位组合法与INS/载波相位组合法所得的修复值在L1、L2间作差(以长度表示),并将其与四差探测值之间的差作为周跳校验值,绘制于图4。由图中可以看出,伪距/载波相位组合法的周跳校验值在前期共计有10个历元已超过或接近一个波长,说明前期含有探测修复失误的情况。而INS/载波相位组合法的周跳校验值在6×10-3米以内,说明其探测并修复了所有周跳。
根据对跑车实测数据的分析,可以看出若将探测值直接取整作为修复值,则传统的伪距/载波相位组合法会产生将噪声误认为周跳而产生误判使周跳数“变多”的现象,而若将探测阈值提升又会产生无法探测小周跳的问题。电离层残差法无法探测某些组合的周跳,且不适用于单频接收机。而INS/载波相位组合法可以探测到所有周跳,且精度足够高,避免了探测失误的现象。
3 结束语
本文针对双天线组合导航场景提出一种INS/载波相位组合法,利用惯性测量信息辅助周跳探测及修复,经实测效果良好,有效避免了探测失误的现象。经探测误差分析,在基线1米时,若惯性测量推算的姿态角在1秒内能满足误差在1.375°以内条件,该方法可以保证能探测到小至1周的周跳,且对惯性测量器件的精度要求与基线长度呈负相关。■
参考文献
[1] 刘文焘.GPS接收机的失锁后处理研究[J].遥测遥控,2010, 31(1): 22-25.
[2] 胡来红,许化龙,孙伟.模糊度函数法在GPS动态定位中的应用研究[J].微计算机信息,2006, 22(10):265-266.
[3] 祝会忠.网络RTK整周模糊度快速解算[D].阜新:辽宁工程技术大学,2008.
[4] 金星,王玲,黄文德.一种面向GPS单频RTK的周跳探测算法[J].全球定位系统,2017, 42(5): 68-73.
[5] 王耀鼎.GNSS系统载波相位周跳探测与修复技术研究[D].长沙:国防科学技术大学,2017.
[6] 吴杨.载波相位差分定位中整周相位解算算法研究[D].哈尔滨:哈尔滨工程大学,2020.
[7]" Du shuang. An Inertial Aided Cycle Slip Detection and Identification Method for Integrated PPP GPS/MEMS IMU System [C]. ION GNSS 2011, Portland OR, 2011.
[8] 谢宏飞.INS辅助GPS模糊度快速恢复与周跳探测技术研究[D].洛阳:解放军信息工程大学,2013.