
增殖放流鱼苗野化训练装置设计与试验
2022-12-29 08:44胡庆松祖西龙陈雷雷
渔业现代化 2022年6期
胡庆松,王 熠,祖西龙,陈雷雷,李 俊
(上海海洋大学工程学院,上海 201306)
海洋牧场是指在某一海域内建设适应水产资源生态的人工栖息场,采用增殖放流和移殖放流的方法,将生物种苗经过中间育成或人工驯化后放流入海,利用海洋自然生产力并进行微量投饵育成,同时采用先进的鱼群控制技术和环境监控技术对其进行科学管理,使其资源量增大,有计划且高效率地进行捕捞[1]。人工苗种放流存活率是影响海洋牧场增殖效益的重要因素[2]。在当前海洋牧场增殖苗种培育及放流实施过程中,对于增殖目标种的野化训练环节仍重视不足,针对批量生产增殖目标种的野化训练技术严重缺乏,苗种放流后生存适应性差、放流存活率低,严重影响了增殖效果,成为制约海洋牧场增殖放流成效提升的主要因素之一[3-5]。
为解决以上问题,自20世纪 80 年代起,欧美地区许多发达国家已开始针对一些主要增殖种类展开研究,重点分析人工养殖苗种和野生苗种间存在的关键行为学模式和生理学特征差异,探讨提高人工繁育苗种野外存活率的野化训练途径[6-12]。进入21世纪以来,以鱼类社会学习能力研究为基础的摄食-反捕食能力训练、环境丰容技术、游泳能力训练等行为驯化研究逐渐受到关注[13-16]。然而,从世界范围看,尽管目前在放流苗种行为驯化理论研究方面取得了一定进展,但野化训练技术在增殖实践中的应用仍处于探索阶段,欧美地区已有研究大多围绕鲑科鱼类开展,且以单一训练技术试验验证为主[17-18]。针对捕食、避敌等方面尚未见已开展的系统化、规模化技术实践应用。
放流后自然海域下捕食活饵和躲避敌害能力是鱼苗能否生存的第一挑战,由于食物和环境方面的明显差异,从人工饵料直接过渡到野外环境下的活饵是一个跳跃性变化。采用人工饵料和活饵复合式进行,加入敌害进行提醒,对放流鱼苗进行野化训练,能够有效提升放流鱼苗的生存能力。
本研究提出一种增殖放流鱼苗野化训练装置,开展承载浮体、多重避敌装置、活饵投放装置、能源供应系统、集成控制中心等关键部件的设计与选型,针对条石鲷开展捕食活饵和躲避敌害两种野化训练试验并分析结果,从而验证该野化训练装置的可行性。
1 整体结构设计
传统的增殖放流鱼苗野化训练通常以人工方式增加环境丰容度或释放活饵的单一训练为主,就提升增殖放流鱼苗的放流初期存活能力而言,存在如下问题:
(1)人工辅助野化,容易形成增殖放流鱼苗对人类活动的依赖性。人工养殖阶段,鱼苗与人员互动频繁,很容易使得鱼苗形成“人至则食至”和在水面摄食的习惯。
(2)单一性训练不能满足野化种群初期存活能力影响因素的综合性要求。海洋牧场环境复杂多变,放流鱼苗进入海洋后需要面临包括捕食有限食物和躲避多种敌害等诸多问题,仅仅针对某一方面的野化训练不能使得鱼苗在自然环境下的生存率得到有效提高。
(3)现有野化装置常以单一功能的组件临时搭建,集成度不够,安装不便,尤其是无法满足网箱野化训练需求,且固定式野化装置容易使得增殖放流鱼苗在野化训练过程中形成类似驯化的条件反射。
针对以上问题,提出以下设计思路并绘制出如图1所示的野化训练装置功能图。

图1 野化训练装置功能图
(1)集成自动或远程手动控制、鱼苗行为观测和远程数据通信等功能,可实现远程无人、自动化的野化训练工作。
(2)综合捕食活饵、躲避敌害两种野化训练方式,满足多重野化训练的需求。
(3)具有机动性,可以变换位置。并集成所有的功能装置于一体,作为整体化设备适用水池的野化训练需求。
依据上述设计思路并结合功能图设计出的野化训练装置主要由多重避敌装置、活饵投放装置、承载浮体、能源供应装置、集 成控制中心等组成。野化训练装置整体结构如图2所示。
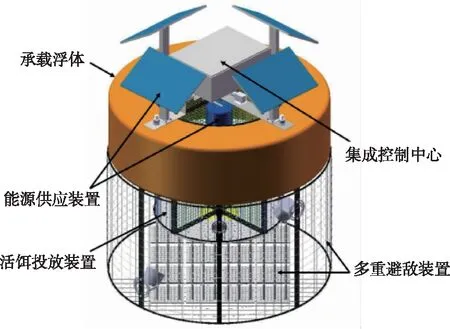
图2 野化训练装置整体结构图
2 功能组件设计
2.1 多重避敌装置设计
2.1.1 格栅避敌装置设计
格栅避敌装置的设计借鉴了深水网箱养殖鱼类的分级原理[19-20],这种原理是利用鱼类因摄食、避敌等行为使得鱼类自动游入格栅所营造的内部空间。对于野化训练装置来说,内部空间和外部环境天然形成了两级格局,利用鱼类体型特征与格栅间距或孔径的关系,可以将体型特征具有明显差异的敌害异种鱼类和同种鱼类分离开来,以训练目标鱼种躲避异类敌害的能力。
避敌格栅规格参数主要由受训目标种与敌害异类的生物学特征决定。分析受训鱼苗与敌害大鱼的体形差异,可以确定避敌格栅的孔径大小。以条石鲷为例,条石鲷体长为体高的1.7~1.9倍[21]。根据国内相关鱼类增殖放流技术规范[22],放流条石鲷苗种平均全长≥5 cm。而鱼苗全长包括体长,由此可以推出条石鲷苗种放流的体高应大于3 cm。黑鲷属于凶猛的肉食性、追逐捕食性鱼类,且在集群捕食中表现积极,反应灵敏[23],适合作为躲避敌害训练中的敌害鱼。黑鲷成鱼的体长一般在12~30 cm,为体高的2.6倍[24],可以推算出黑鲷成鱼的体高约为4.6~11.5 cm。综合作为受训目标种的条石鲷鱼苗和作为敌害异类的黑鲷成鱼的体高差异,可以将避敌格栅的孔径大小锁定在3~4.6 cm之间。此外,由于增殖放流鱼苗在放流前相互之间的体形和规格也有差异,为了初步减少鱼群种内竞争与攻击的可能,在保证有一种孔径大小介于3~4.6 cm之间的避敌格栅的前提下,还可以增加一种孔径大小略小于3 cm的避敌格栅。通过这种孔径大小略小于3 cm的避敌格栅,当有体高大于这种避敌格栅孔径的增殖放流鱼苗因为饥饿等客观原因追逐攻击体高小于这种避敌格栅孔径的同伴时,后者可以通过穿过避敌格栅游入内部,而前者被阻挡,那么后者就可以为自己赢得一定的躲避时间,这也在另一方面体现了避敌格栅的分级原理。
2.1.2 仿岩礁巢穴装置设计
多数增殖放流鱼种,如大黄鱼、黑鲷、条石鲷、皇姑鱼等,具有恋礁性。因此,模拟岩礁、巢穴等环境可以训练增殖放流鱼苗寻找、识别巢穴和躲避同伴攻击的能力。仿岩礁巢穴装置的外形与钉板类似,将两端倒有圆角的多个柱子安插在平板上,并整体安装在格栅避敌装置的底部圆形格栅内侧。
2.1.3 多重避敌装置整体结构设计
格栅避敌装置和仿岩礁巢穴装置组成多重避敌装置,其整体结构三维建模图如图3所示。
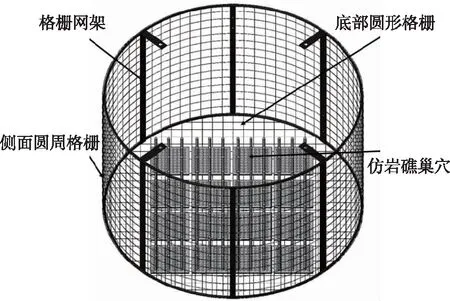
图3 多重避敌装置的三维建模图
2.2 活饵投放装置设计
2.2.1 结构与空间设计依据
活饵投放装置的结构与空间设计主要以活饵投喂量、暂养密度为考量。活饵投喂量过大,可能会给增殖放流鱼苗造成一种“食物供应充沛”的假象,不利于训练其捕食活饵的能力。活饵的暂养密度过大,会加剧活饵争夺有限空间,竞争生存,导致存活率降低[25]。综合以上因素,结合实际训练要求,设计出如图4所示的活饵投放装置。
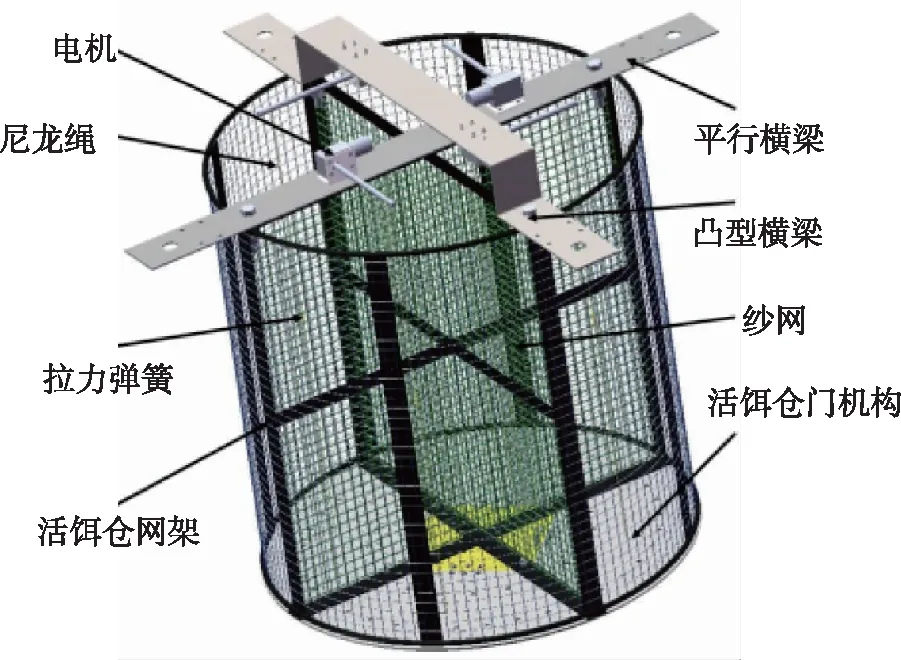
图4 活饵投放装置的三维建模图
2.2.2 仓门运动机构设计
活饵投放装置主要由活饵仓网架、活饵仓门机构、纱网、凸型横梁、平型横梁、电机、尼龙绳、拉力弹簧等组成。活饵仓网架呈圆柱状,内部有3个十字形网架。为实现活饵定量投放功能,将纱网安装在活饵仓网架的外侧和十字形网架上将料仓分成四等分。活饵仓门机构包括四扇仓门,安装在最下侧的十字形网架上。电机和活饵仓门分别绑接一段尼龙绳,两段尼龙绳之间以拉力弹簧相连接。拉力弹簧用于缓冲尼龙绳对电机轴的施力负担,防止开闭仓门时间过长而造成尼龙绳绕组拉弯电机轴。安装在平行横梁和凸型横梁上的电机通过拉力弹簧和两段尼龙绳与仓门相连接。若尼龙绳绕组为顺时针方向,当电机通电并顺时针转动时,活饵仓门因材料密度大于海水密度而开启,反之则关闭。
2.2.3 仓门驱动电机转速的确定
仓门开闭时间可以为定时开关模块设定时间提供依据,而电机转速的选择关系到仓门开闭时间的设定。仓门开闭如图5所示。
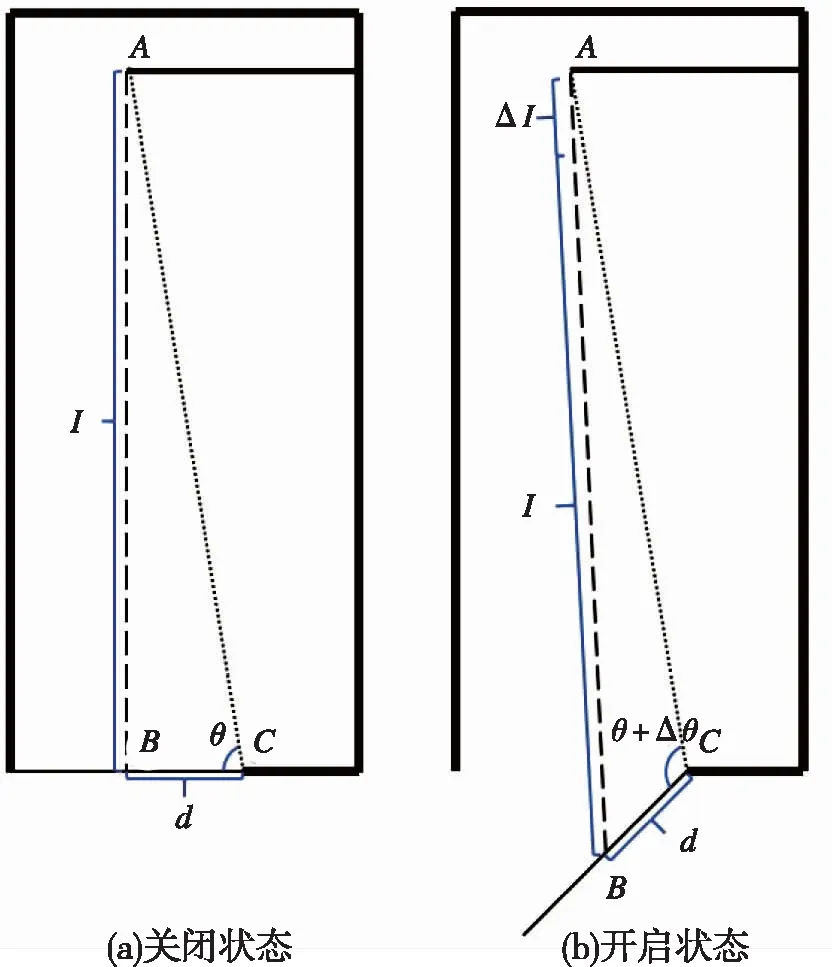
图5 仓门开闭示意图

(1)
(2)
(3)
式中:Δl为尼龙绳的伸长量,mm;l为尼龙绳在仓门关闭状态下的长度,mm;d为仓门门轴到尼龙绳结点的距离,mm;Δθ为设定的最大开门角度,(°);N为尼龙绳在电机轴上的绕组圈数;c为电机轴横截面的圆周长,mm;t为仓门开闭所需的时间,s;nr为电机转速,r/min。
假设尼龙绳处于绷紧拉直状态,拉力弹簧处于原长状态。为了减少仓门开闭过程中对鱼苗和活饵的影响,仓门的运动幅度不宜过快过大,故设定最大开门角度Δθ=45°,时间t=5 min。根据公式(1)~(3),求得电机转速nr约为0.6 r/min。选择额定电压为12 V,额定转速为0.6 r/min的直流蜗轮蜗杆减速电机作为仓门驱动电机。
3 辅助构件设计
3.1 承载浮体设计
3.1.1 承载浮体设计原则
为满足装置的机动性要求,采用一种浮体,由浮体提供浮力,使得装置的一部分可以浮于水面,便于根据需要改变所处位置,避免增殖放流鱼苗在野化训练过程中形成类似驯化的条件反射。以近海小型海洋浮标标体为母型,进行浮体的结构形式和规格尺寸的设计,开展相关数据的计算,并科学选材进行加工。
在承载浮体概念设计阶段需要满足以下两个基本原则:
(1)浮体所提供的浮力能与整套野化训练装置所受重力相平衡。根据野化训练装置的功能设计要求,预估包括浮体在内的所有组件的重量为浮体的结构形式和规格尺寸的设计提供依据。
(2)浮体所营造的空间充足。在初步满足所有组件装载的基础上仍留有一定的空间余量。
3.1.2 结构形式与规格尺寸确定
海洋浮标标体的结构形式有圆盘形、船型、环形、球形、柱形等。圆盘形浮标和球形浮标具有有效面积和空间利用率较高、稳定性较好、能够抵抗恶劣的海洋环境、易于布置投放、运输方便等特点,且这两种浮标结构对称、生产制作成本较低。然而,由于球形浮标在垂荡方向上的随波性较好,通常仅用于波浪测量。船形浮标呈流线型,在纵向上的标体结构较长,因此具有不易倾覆、抗风浪能力较强、拖曳运输方便的特点,但其造价相对较高。柱形浮标吃水量较大,且通常需要水下浮标作为辅助[26-28]。
为充分利用浮体空间,便于数据采集、控制、通讯、能源供应等设备或系统的安装与使用,结合该野化训练装置在水池或网箱的应用实际,参考现有海洋浮标标体的结构形式,设计一种环形圆柱承载浮体。这种浮体结构简单、制作容易,且其所营造的空间可以得到充分利用。
考虑到增殖放流鱼苗和活饵的规格、数量等因素,本次设计的浮体的规格尺寸为外圈直径1 m、内圈直径0.6 m、高度0.3 m、外圈上下两端圆角半径0.02 m、圆环上的4个通孔直径0.021 m。
根据以上设计尺寸,取圆周率π=3.14,则该浮体的体积约为0.149 8 m3。
3.1.3 浮性分析
浮体的规格尺寸决定了其自身的最大排水量,从而决定了其所能够提供的最大浮力的大小。根据阿基米德原理,
F=ρVg
(4)
式中:F为浮体所能提供的最大浮力,N;ρ为浮体排开水的密度,kg/m3;V为浮体排开水的体积,m3。
海水密度一般在1.02×103~1.07×103kg/m3之间,取ρ=1.02×103kg/m3,g=9.8 N/kg,则求得该浮体所能提供的最大浮力F约为1 497 N。
根据表1所提供的总质量,求出该野化训练装置的总重量G为539 N。
表1 野化训练装置各组件的质量
从而得到F>G,说明该浮体承载后仍然能够使得装置的一部分浮于水面。
3.1.4 选材与工艺
海洋浮标标体一般是由钢板制成,将所需功能装置集成在标体上。然而,选用钢制材料需要考虑包括防护在内的许多问题。因此,本设计采用具备众多优良特性的EVA材料。EVA抗菌能力强、无毒、无味、无污染,具有密闭泡孔结构,防潮不吸水,抗海水腐蚀能力强。由于其韧性好、回弹性高和抗张力强,具备良好的减震缓冲性能。它还拥有良好的隔热、保温防寒性能,可应用于严寒和曝晒场合[29]。
此外,为进一步增强承载浮体的防海水腐蚀能力,在EVA材料表面喷涂聚脲酯,形成具有一定厚度的聚脲涂层。相对于传统有机涂层材料,聚脲材料拥有低温韧性好、防腐、耐磨、抗湿滑、耐老化、抗热冲击、耐介质、固含量高等优异的物理化学性能[30]。问世以来,被广泛应用于防水防渗、防腐耐磨等工程防护领域[31]。
综上所述,聚脲涂层EVA材料承载浮体可以同时适应水池和近海网箱的复杂环境。
3.2 能源供应装置设计
由于水池和网箱占有一定的面积,尤其在占地面积比较大的网箱中,从陆地搭接电缆需要考虑的因素较多,也不利于装置位置的大范围调整,甚至可能会对增殖放流鱼苗的野化训练效果造成不小的影响,充分利用太阳能这类可再生资源供应能源很有必要,故采用蓄电池与太阳能板相结合的方式实现各个用电设备与系统的连续供电。在承载浮体上侧的两个横梁上安装了4块太阳能板,太阳能板的功率根据野化训练装置的总体布局和设备用电情况确定。同时,为充分利用活饵投放装置的冗余空间,设计一种隔水密封蓄电池,将12 V锂电池放入与之尺寸规格相匹配的PVC管中,用两个PVC内堵头加盖封装,并在其中一个堵头中心处打孔穿线,使用带密封圈的金属螺纹堵头拧紧。
4 系统集成设计
4.1 控制系统设计
为实现自动化的综合野化训练工作,设计控制系统,实现对活饵投放装置、监控系统、通信系统等装置或系统的自动运转,同时预留远程手动控制功能,便于变更工作计划。控制系统主要由三个定时开关模块和一个充放电模块构成。通过与定时开关模块相匹配的智能手机应用程序,实现远程手动控制功能。充放电模块选用太阳能充放电控制器,定时开关模块选用Wi-Fi四路智能时间控制器。太阳能充放电控制器连接与控制太阳能板、蓄电池、负载三路,具有短路保护、过充保护、过放保护、开路保护、充电过热保护、防反接保护等功能,可以有效保护整体电路的安全与稳定。Wi-Fi四路智能时间控制器作为电子设备的定时开关,可以通过Wi-Fi网络和智能手机应用程序远程设置实现设备开关时间控制功能,具体设置如表2所示。

表2 定时开关模块各路功能简介
3个定时开关模块各路的功能简介如表2所示。二号定时开关模块主要是通过控制电机电路的正负极转换以实现电机的正反转控制,控制原理电路图如图6所示。
图6 采用正负极性转换开关构成的简单正反转控制电路
4.2 通信系统设计
构建通信系统,可以实现装置自动控制的设定、远程手动控制操作、鱼苗行为的实时观测等功能。通信系统的载体是无线通信模块,在此选用移动路由作为无线通信模块。移动路由建立了用户与定时开关模块、录像存储模块之间的无线通信。通过定时开关模块相关智能手机应用程序,可以远程使用定时开关模块以便控制相关设备的启停或正反转控制。移动路由与定时开关模块两者相互作用。移动路由为定时开关模块提供网络通信,定时开关模块控制移动路由的电源通断。
4.3 监控系统设计
在增殖放流鱼苗野化训练过程中,需要对格栅避敌装置、仿岩礁巢穴装置和活饵投放装置进行监控,确认各功能装置运转正常,同时观测鱼苗行为,以便分析野化训练装置的野化效果。监控系统主要由录像存储模块、两个水下摄像头和一个水下补光灯组成。录像存储模块选用网络硬盘录像机。网络硬盘录像机作为远程监控的媒介,采用POE传输技术,同时解决了供电和网络问题,其与水下摄像头、通信系统连接,通过与录像存储模块相匹配的智能手机应用程序,用户可以在线观看水下摄像头的实时监控录像。此外,由于供应能源的隔水密封蓄电池额定电压为12V,采用“12V24V转48V3A升压模块(非隔离)”类型的DC-DC直流电源转换器为额定电压为48V的网络硬盘录像机供电。
4.4 集成控制中心设计
为实现野化训练装置定时定量投放活饵、实时观测鱼苗行为并录像保存等功能,将定时开关模块、无线通信模块、充放电模块、录像存储模块集成于防水控制盒中作为集成控制中心,以实现野化训练装置的自主运行,避免人为因素对野化训练工作的干扰。
集成控制中心如图7所示。

图7 集成控制中心实物图
5 验证试验与效果分析
5.1 模拟生境构建
为了验证野化训练装置的有效性,于2021年夏季在浙江省舟山市西轩渔业科技岛对条石鲷鱼苗开展了野化训练试验。试验水池规格尺寸为5 m×5 m×1.2 m,容积为30 000 L。试验设置两个水池,野化池和对照池。每个水池各投放2 500尾条石鲷鱼苗。野化池投放野化训练装置和4个规格不一的简易封闭辅助格栅,对照池不做任何处理。简易封闭辅助格栅选用绿色2.5 cm正六边形孔丝网和3.3 cm正方形孔加厚2.2 mm聚乙烯平网,不仅可以起到躲避异类的作用,还能达到分级躲避同类大鱼的效果。如图8所示为野化池中的野化训练装置和简易封闭辅助格栅。

图8 野化池中的野化训练装置和辅助格栅
此外,为了更好地观察记录本次试验中野化训练装置的实际效果,在野化池和对照池斜上方分别安装了一台POE球形摄像头并配备了与之相连的网络硬盘录像机用于实时录像。在场地内安装了一台信号放大器用于解决移动网络信号问题。
5.2 野化训练方案
5.2.1 捕食活饵训练方案
根据条石鲷以无脊椎动物或附着于岩礁上的生物为食的特性,初步选择试验场地及其附近较易获取的脊尾白虾作为条石鲷捕食活饵训练用的活饵。
脊尾白虾为热温带海域底栖虾类,对环境适应性广,可在2~38℃的水中生活,最适生存温度为27.0~29.6 ℃[32],能够在条件简陋的水池和活饵仓中短期存活,可以作为捕食活饵训练中的活饵。
野化池和对照池每天均投喂4次饵料。野化池每次投放人工饵料时的投喂量与对照池相同。为使训练更加贴近自然状况,并考虑到成本因素,活饵投放没有固定的时间和次数。
5.2.2 躲避敌害训练方案
躲避敌害训练流程图如图9所示。
图9 躲避敌害训练流程图
黑鲷成鱼来源于近期海钓,水桶暂养环节所用条石鲷均从野化池中随机捞取。
5.3 训练效果与指标分析
5.3.1 捕食活饵训练效果
观察发现,经过15 d的捕食活饵训练,条石鲷对脊尾白虾从一开始的试探攻击,到群起而攻之,再到“迫不及待”冲进活饵仓抢食,连虾壳都不剩。有时甚至会在仓门没有开启的情况下,透过仓门的小孔,在活饵仓外啄食恰好躺在门孔上的脊尾白虾。
5.3.2 躲避敌害训练效果
在训练初期的水桶暂养环节中,条石鲷与黑鲷之间均存在试探性攻击对方的行为,但双方均没有表面伤痕。到了训练中期的敌害提醒环节,封闭在格栅中的黑鲷与水池中的条石鲷鱼苗互动明显,但最终死亡。捞出并观察该死亡黑鲷,发现其鱼体僵硬且表面多处有伤痕。结合现场观察分析认为封闭格栅限制了黑鲷的活动,而条石鲷以压倒性的群体优势,不断攻击黑鲷,最终导致黑鲷死亡。于是,在训练后期的完全共存环节中,又投放了黑鲷2尾。1 d后黑鲷1尾死亡,但另1尾表现正常,分析认为前者可能为不适应环境的个体。存活的那一尾黑鲷时常追逐条石鲷鱼群,部分条石鲷能够借助避敌格栅躲避。
5.3.3 基本生长指标对比
鱼苗全长和体质量两个基本生长指标的变化可以在一定程度上体现鱼苗身形的变化。为测定基本生长指标,在野化训练初期和末期各采样一次,两次采样间隔12 d,每次捞取野化池和对照池鱼苗各50尾。鱼苗基本生长指标对比如表3所示。
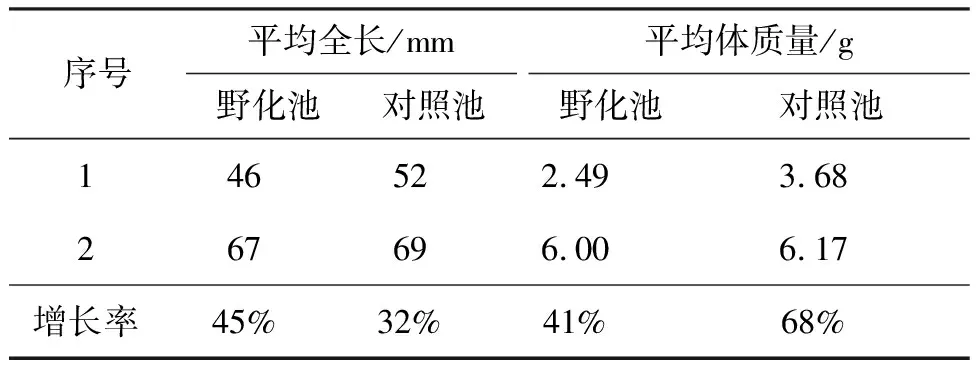
表3 鱼苗基本生长指标对比
分析表3中的数据可见,野化池鱼苗相对于对照池鱼苗,全长增长率较高而体质量增长率较低。结合现场观察,野化池鱼苗相对于对照池鱼苗活动次数多、时间长,因此,体长增长快和体质量增长略慢,但生长正常,摄食积极。野化池鱼苗瘦长体型正说明了其较强的活动和摄食能力。
5.3.4 鱼苗死亡情况对比
在试验过程中难免会出现部分鱼苗死亡的现象。死亡鱼苗的表面特征情况的分类统计如表4所示,野化池与对照池鱼苗死亡数量统计如图10所示。
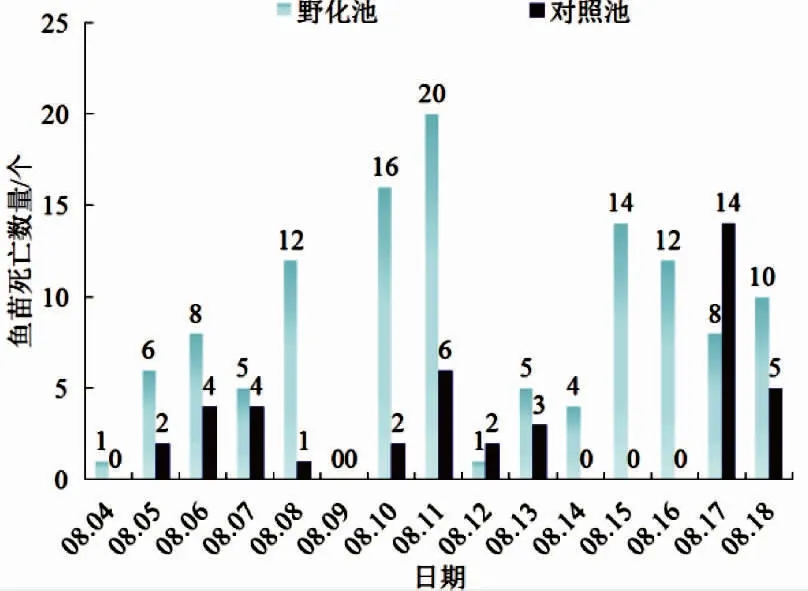
图10 鱼苗死亡数量统计图
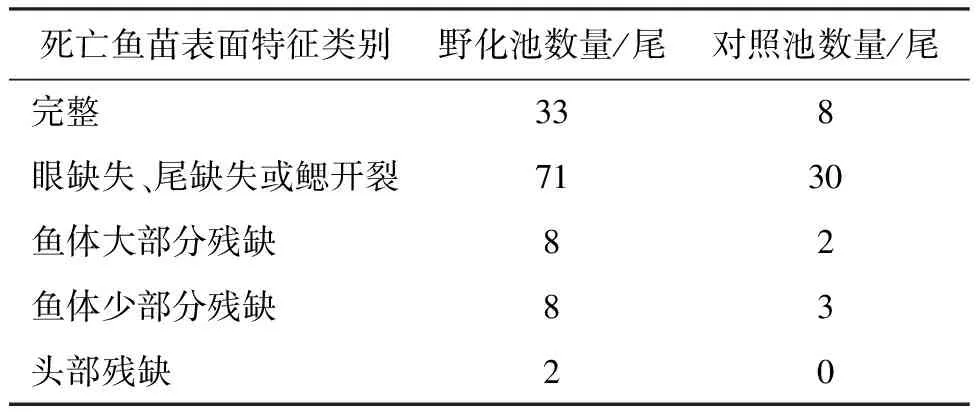
表4 死亡鱼苗的表面特征情况的分类统计
分析表4中死亡鱼苗的表面特征情况,发现超过半数的死亡鱼苗为眼缺失、尾缺失和腮开裂,而野化池中的鱼苗除了眼缺失、尾缺失和腮开裂外,还有一定数量的死亡鱼苗鱼体残缺,野化池中更有2尾死亡鱼苗头部残缺,据此可以推断为受到同伴激烈攻击,显示了存活鱼苗较强的攻击能力和攻击性。
从图10可以看出,除8月9日和8月17日以外,几乎每天野化池鱼苗的死亡数量都比对照池要多。对比野化池与对照池鱼苗死亡的数量和表面特征,可以分析出受训鱼苗攻击性强。
6 结论
针对海洋牧场增殖放流苗种的适应性和放流存活率不高的问题,设计了一种增殖放流鱼苗野化训练装置,实现了机动化、自动化的多重野化训练工作。利用野化训练装置针对条石鲷鱼苗开展捕食活饵训练和躲避敌害训练试验。试验表明,在选定的野化训练模式下,可在一定程度上实现条石鲷鱼苗行为特征的改善,同时验证了增殖放流鱼苗野化训练装置的可行性。
□
猜你喜欢
舰船科学技术(2021年12期)2021-03-29
哈尔滨工程大学学报(2021年2期)2021-03-16
数学大王·中高年级(2020年4期)2020-04-19
上海船舶运输科学研究所学报(2019年1期)2019-04-19
船海工程(2018年1期)2018-03-01
大众考古(2017年8期)2017-12-12
福建文学(2015年12期)2015-12-07
中国青年(1965年14期)1965-08-20
