基于DK算法的石化企业灭火救援路径优化技术
2022-12-28 11:21:24张建军
中国新技术新产品 2022年19期
张建军
(青岛消防救援支队,山东 青岛 266000)
石化企业发生火灾将会危及人民生命和财产安全,必须进行及时有效的救援。从实际情况看,石化企业的火灾成因复杂、燃烧物质种类繁多并伴有爆炸等其他危险,导致救援工作困难[1]。同时,石化企业厂区内道路网络的复杂性,也进一步增加了救援难度。因此,要完成石化企业火灾的救援工作,首先要制定合理的救援路线,确保救援队伍和救援设备能够安全可靠、快速及时地到达救援现场[2]。在火灾现场中,救援路线可能由多个方案组成,哪一个方案更合理就需要通过路径优化技术来搜寻[3]。该文针对石化企业的救援问题特点,建立一种基于DK算法的救援路线优化方法。
1 基于DK算法的路径规划
石化企业的火灾救援路线的最佳选择,最重要的指标之一就是可以使救援总路径最短,从而提升救援效率。而DK算法就是一种最有针对性的最短路径搜索算法。DK算法的基本原理是,按照决策树的理论构建搜索救援的路径树,路径树的根节点应该满足到达其他节点的路径之和最短。
DK算法的具体实现过程如下:构建一个节点集合,并用S表示这个集合。在DK算法的初始状态下,S中就有一个节点,这个节点用v0表示。随着DK算法的搜索过程展开,不断会有新的路径搜索结果产生。设一条路径可以用其经历的节点集合为(v0,…,vk),那么就可以将vk添加到集合S中。按照这样的办法搜索到所有路径之后,全部节点都会纳入集合S中。
对找到的每条路径的长度,可以用下面的方法表示第k条最短路径,如公式(1)所示。

式中:参数dk为最短路径的长度,函数min{}为求取集合中所有元素的最小值,参数di为所有可能路径的长度,参数vi为节点集合中第i个节点,它可以是集合S中除去v0以外的任意一个节点。
随着搜索深度的增加,原有路径会有新的节点加入,使路径长度进一步延伸。当一个新的路径终点vk进入节点集合S以后,那么任意一条原有路径di应该按照下面的方式进行长度上的更新处理,如公式(2)所示。

式中:参数(vk,vi)为节点vk到节点vi的弧的长度,参数c(vk,vi)则为节点vk到节点vi的弧上的权重大小。
根据有向图理论的最小权重值路径搜索策略如下。
第一,对最短路径长度的上界进行处石化处理,如公式(3)~公式(5)所示。
式中:参数d(v)为已经搜索到的全部路径的最短长度的上界,参数k(v)是设定的一个BOOL型变量,只有真(True)和假(false)两种取值,参数p(v)为一个定点的向后方向上的指针。
第二,不但执行对k(v)= 的扫描处理,计算其中的节点,是否会出现一个能够计算出新的最小长度的节点,如果可以得到,将其记录下来d(v)。
第三,与第二步相同的操作在相邻节点w上执行,即对k(w)=flase扫描处理,计算其中的节点,是否会出现一个能够计算出新的最小长度的节点,如果可以得到,将其记录下来d(w)。如果d(w)满足如公式(6)所示的条件。

则更新d(w)和p(w)。
第四,不断执行第二步和第三步,当k(v)=true是搜索过程结束,此时找到的路径即为优化后的最短路径。
2 DK算法的改进策略
2.1 DK算法的局限性
DK 算法的局限性有以下2点:第一,最短路径一般是基于单一条件限制下的最短,这时DK算法是有效的。但是,很多情况下最短路径的限制条件,同时包括多个指标,包括距离、时间、费用等。石化企业的救援工作中,这种路径的最短判定就包括更多因素。第二,DK算法的灵活性稍差,对一些突发情况难以应对。而石化企业的火灾救援,却经常会出现突发情况。
2.2 DK算法的改进
为了解决DK算法的局限性问题,也为了更好地解决石化企业的火灾救援问题,该文在DK算法的常规执行框架下,提出两点改进策略。
第一,同时进行正向和反向搜索,其策略如图1和图2所示。

图1 DK算法的正向搜索策略
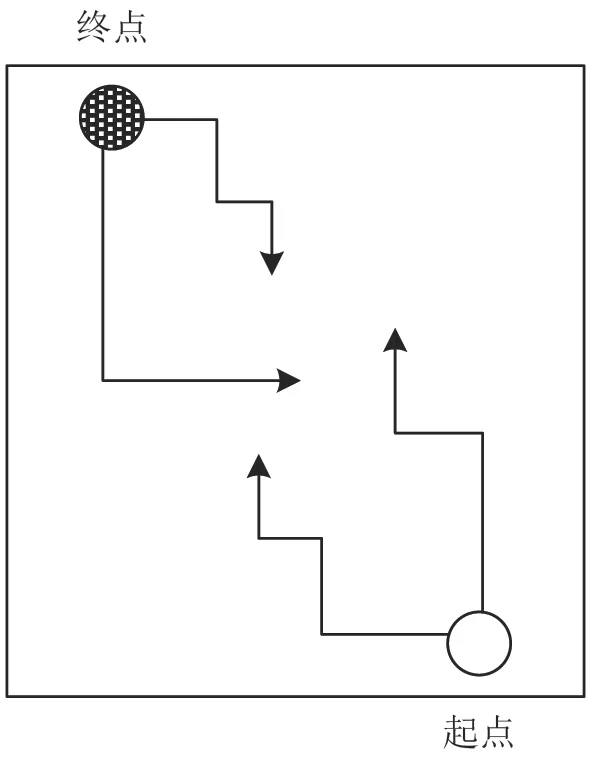
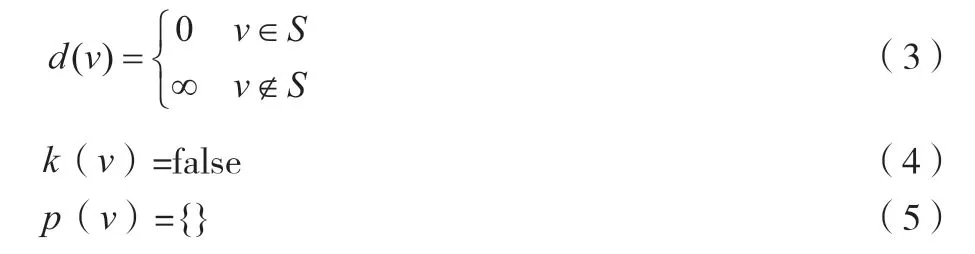
图2 同时进行正向和反向搜索的改进策略
图1和图2中,方框区域代表了石化企业火灾现场救援区域,白色圆点代表了救援路径搜索的起点,黑色圆点代表了救援路径搜索的终点,黑色实线代表了搜索路径和可能的搜索方向。
对DK算法而言,最优路径的常规搜索策略,就是从起点开始,按照DK算法的搜索规则,一边寻找可能的路径一边比较,直至找到一条到达终点的最短的路径。这种情况如图1所示。为了提高搜索效率并更好地满足多车辆协调救援任务的全局性要求,该文提出同时进行正向和反向搜索的改进策略,如图2所示。从图2可以看出,在DK算法的既定搜索规则下,最优路径同时从起点和终点开始进行搜索。从起点开始的搜索目标点是终点,这一搜索是正向搜索。从终点开始的搜索目标点是起点,这一搜索是反向搜索。同时进行正反向搜索,不仅提高了搜索效率,也可以在最优路径之后提供更多的次优路径被选,在多车辆集体救援时,可以根据优先级将最优路径、次优路径分别配置给各个车辆。
第二,对大场景的复杂区域,执行分区域搜索,其策略如图3所示。
图3中,外部的矩形框表示了整个的大场景复杂区域,其内部又被分割成4个小的区域,每个区域都有一些白色的圆点,这些圆点代表了分区域内的关键点,即救援路径必须经过的点。因为救援区域的场景大并且内部情况复杂,直接从起点到终点或者直接从终点到起点的路径搜索都会比较困难。为此,提出的分区域搜索策略,是将原始区域进行区域分割,形成一个个更小的区域。在每个小区域内,根据关键点必须经过的原则,在关键点之间执行路径搜索。在每个小区域内的局部路径确定后,再使各个区域之间的路径连接,从而形成完整的最优救援路径。
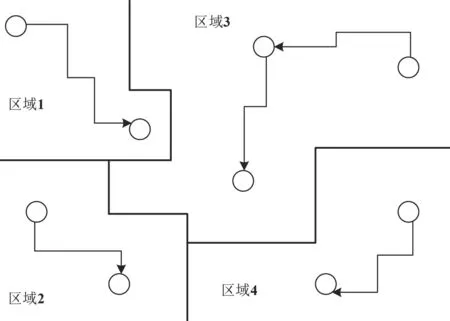
图3 大场景复杂区域的分区域搜索策略
通过以上两种改进措施,可以有效地解决DK算法的局限性,提升其灵活性、改善其全局最优的搜索性能。
3 石化企业火灾救援路径优化仿真试验
为了验证该文方法对石化企业火灾救援的有效性,接下来以仿真试验的形式对DK算法的救援路径优化性能进行验证性试验。
试验过程中,仿真试验所有的计算机配置情况如下:计算机的CPU为双核多线程处理器,单核主频为3.0GHz,计算机的内存大小为16GB,计算机的硬盘大小为500GB。仿真试验所使用的软件环境为MapX平台,这一平台专门为路径优化算法的验证试验提供试验环境。
首先,执行该文改进的DK算法,在石化企业复杂场景的模拟火情场地下进行救援路径搜索试验,分别得到最优救援路径和两个次优救援路径,救援路径规划的试验结果如图4所示。
在图4中,石化企业的整个火灾火场模拟区域设定为400个栅格大小,x方向上配置了20个栅格长度,y方向上配置了20个栅格长度。在这个400个栅格大小的火场区域上,救援车辆的起点位于x方向上位置为1、y方向上位置为20的栅格处,救援车辆的终点位于x方向上位置为18、y方向上位置为1的栅格处。从视觉效果上,救援车辆的起点位于场景中的左上方,终点位于右下方。同时,火场区域内有多个形状各异的障碍物干扰,障碍物所在位置设定为背景为叉剖面线的栅格区域,这些模拟障碍物在实际中可能对应着石化企业的厂房、储罐、原材料堆放区域等。
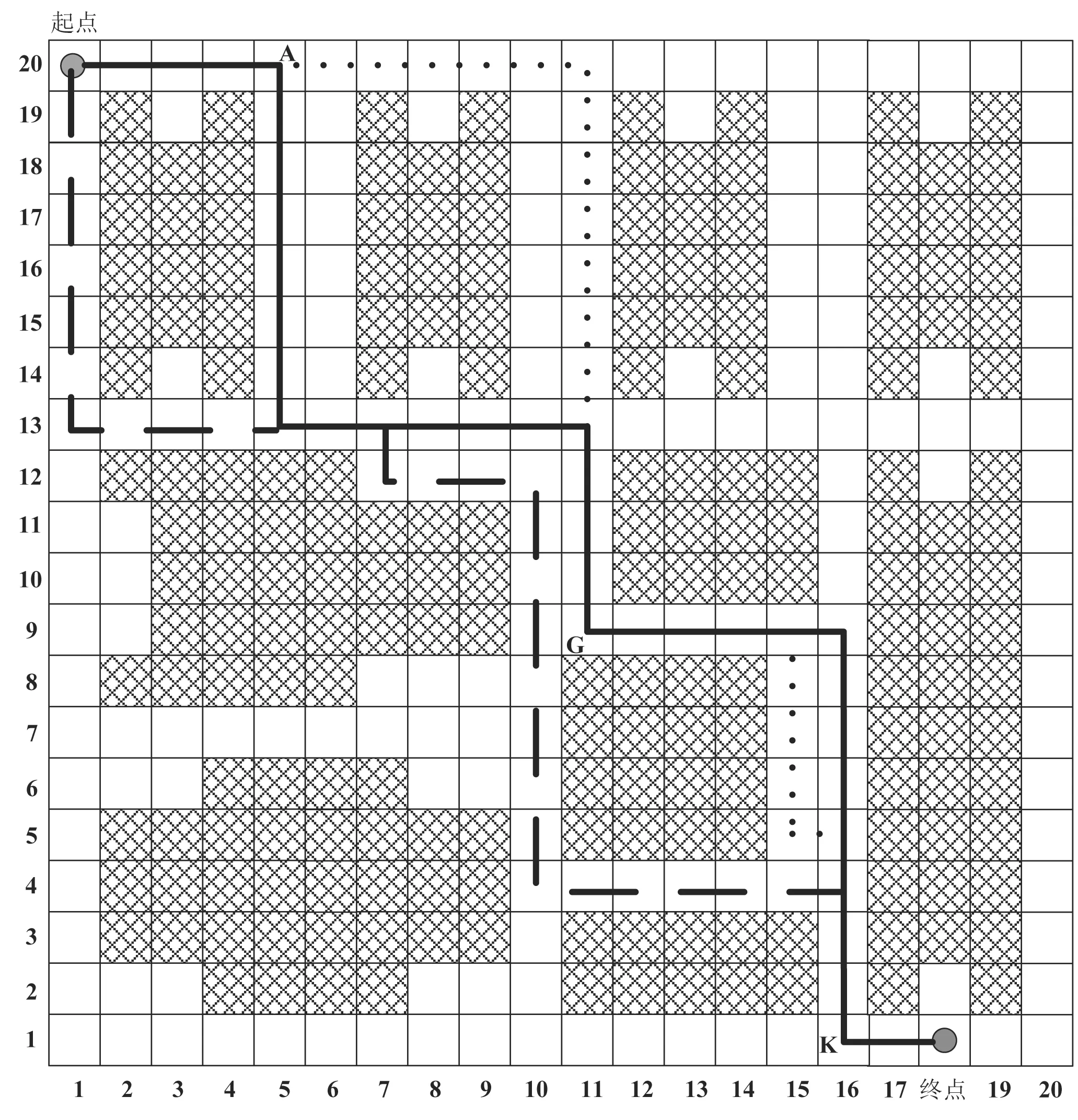
图4 应用该文提出的改进DK算法进行的石化企业火灾救援路径规划仿真试验结果
图4中,DK算法一共搜索到1条最优路径,如图中的黑色粗实线所示。同时,DK算法还搜索到2条次优路径,如图中的黑色粗虚线和黑色粗点线所示。三条路径都存在相互的重叠区域,全部以黑色粗实线覆盖。从DK算法的规划结果可以看出,最优次优路径都有效地避开了障碍物,并从起点顺利到达目标终点。
为了将该文采用的改进DK算法与传统 DK 算法进行对比,将另一组试验结果展示为表格形式,见表1。

表1 该文改进DK算法和传统DK算法的性能对比
表1中分别说明了石化企业14组火灾救援的模拟任务,对传统DK算法和改进DK算法分别比较了路径规划时间和规划出的路径长度。从两项参数的对比结果可以明显看出,该文提出的改进DK算法,完成路径规划的时间更少,并且规划的最优路径更短。该结果说明了该文提出的改进DK算法对火灾救援的有效性,可以应用于石化企业的火灾救援工作。
4 结论
该文针对石化企业火灾救援难度大的问题,提出一种基于改进DK算法的救援路径规划方法。首先,介绍了传统DK算法的实现原理和操作流程。其次,分析了传统DK算法的局限性,提出了正方向搜获和分区域搜索的改进策略,提升了DK算法的灵活性和全局寻优性能。最后,在Mapx仿真环境下,针对石化企业火灾救援场景进行模拟,并分别采用传统DK算法和改进DK算法进行最优路径规划的对比试验。试验结果表明:该文提出的改进DK算法得到的最优路径更短,完成路径规划的时间更少,适合石化企业的火灾救援。
猜你喜欢
哈哈画报(2022年5期)2022-07-11 05:57:52
科技创新与应用(2021年31期)2021-11-09 13:11:18
数学小灵通(1-2年级)(2020年9期)2020-10-27 03:24:46
学生天地(2020年1期)2020-08-25 09:01:44
作文大王·低年级(2017年11期)2017-12-05 00:08:45
小学生学习指导(低年级)(2017年12期)2017-11-22 06:22:39
读写算(上)(2015年6期)2015-11-07 07:17:55
数学大王·低年级(2015年6期)2015-07-09 18:02:42
弹箭与制导学报(2015年1期)2015-03-11 15:32:23
雷达学报(2014年4期)2014-04-23 07:43:13