渔业养殖水质监测改善一体化水下机器人设计
2022-12-28 11:41陈凌轩吴清云谢辰旻马帅华强嘉钰
湖北农业科学 2022年19期
陈凌轩,吴清云,谢辰旻,马帅华,强嘉钰
(上海海洋大学,a.工程学院;b.外国语学院;c.海洋文化与法律学院,上海 201306)
随着智能机器人行业的发展,各大行业“机器换人”已成为大趋势。近年来,中国渔业养殖水体污染问题日益严重,通过水上或水下工程装备代替人工取样、测量等较人工水质调控更具高效性。如草鱼最适宜生长环境pH为6.6~7.6,且对溶氧量的需求很高,需对其养殖环境加以调控,方可保障草鱼的品质,鲢鱼、鳙鱼也对溶氧量及pH有一定要求。通过人工调控效率较低且成本高。
国外针对水下机器人的研究已进入应用化阶段,当前中国水下机器人的应用研究仍处于起步阶段。在渔业养殖实际应用中,水下机器人因其灵活性、作业时间长和工作范围广受到了世界各国的研究和关注。除了研究水下机器人结构的设计[1-4],水下机器人控制设计与仿真[5-8],水下机器人传感技术与检测[9-12],水下机器人应用[13-15]等,还应注重其应用与实现渔业养殖水质监测及水质改善的结合,根据局部水环境中存在的过界参数进行调整。当前国内仍未出现结合水质监测与水质调控于一体的设备,而西班牙海洋技术中心(CETMAR)研发了一款浮标[16],即可针对采样样本,通过微生物学参数的分析制定水质调控方案,其缺点在于采样范围局限,不适用于大范围渔业养殖。欧美国家及日本也开发了相应的渔业养殖水下机器人,并得到了小规模应用。
本研究围绕渔业养殖过程中对于水下机器人的需求及水下机器人开发成本高、国内同类产品少的现状,研究基于多传感器技术和自主巡航技术的水质监测及水质改善一体化水下机器人,从整体设计、运动建模及实物试验3个角度入手,分析其功能与效果,可在渔业养殖监控、渔业水质改善方面发挥作用。
1 系统架构及工作原理
1.1 系统架构
水下机器人下位机为实现水下机器人功能的硬件电路模块,通过稳压电源对机器人各模块供电。水下机器人包括水质监测模块、水质改善模块及自主巡航模块等部分。下位机的架构实现了水下机器人的自动控制和工作,而上位机负责对水下机器人获得的动态参数进行接收和显示。水下机器人结构框架如图1所示。

图1 水下机器人结构框架
1.2 工作原理
水下机器人需在水环境中工作,在工作启动前须通过程序设定巡航终点和深度,将水下机器人置于水中时即可启动工作模式。水下机器人根据卫星定位模块获取巡航起始点及终点位置信息,惯性导航模块用于水下无卫星信号环境下的实时定位,通过定位信息与相对位置信息控制螺旋桨,调整运行方向和深度,向终点方向及目标深度航行。水下机器人在航行过程中采集水质相关数据(pH、温度、溶氧量等),搭载的多传感器装置定点定深度采集相关数据,并通过ROV线缆和无线通讯实现浅水区的水质数据传输在上位机平台进行显示。
1.3 结构设计
水下机器人整体呈胶囊状结构,两端外部设有法兰连接装置,下方设有4个螺旋推进器装置,尾部设有涡轮平衡装置。外部为抗压防水壳体,前部舱内装载驱动模块,驱动模块与防水外壳之间设置电路保护层,由主管和位于末端的整流罩组成。主管内设有主控制器及双泵,连接层处设有ROV线缆接口,左右两端分别对称设置保护罩,保护罩内包含导流管与传动轴。2个垂直螺旋推进器保证水下机器人的垂直方向运动,2个水平螺旋推进器用以实现水平方向的调整及运动,尾部涡轮平衡装置控制水下机器人整体姿态平衡,避免大幅度扰动。水下机器人尾部包括第二法兰连接装置、防水外壳、涡轮推进器装置及驱动模块。图2为水下机器人的渲染图。

图2 水下机器人渲染图
2 控制系统
2.1 运动模型分析
渔业养殖用水下机器人在水下的运动控制受重力、浮力、水体阻力、自身推进力及外部扰动等的影响,其动力学系统为非动力系统。通过简化受力模型分析其水下运动控制方式,根据国际水池会议(ITTC)以及造船与轮机工程学会(SNAME)术语公报推荐的坐标系[17],建立动坐标系(O-X′Y′Z′)与静坐标系(E-XYZ)两种类型坐标系,如图3所示。表1为水下机器人运动参数。

图3 水下机器人运动分析坐标系

表1 水下机器人运动参数定义
静坐标系与动坐标系之间的速度矢量可通过式(1)、式(2)及式(3)进行转换。


J(η)为坐标转换矩阵,其计算公式如式(4)所示。

六维度的水下机器人运动模型,其所有运动方式可在上述2种坐标系中得到描述,并分解为绕各自3个坐标轴的旋转运动,其动力学模型[18-20]可通过式(5)所示方程描述。

式中,M为水下机器人惯性矩阵及水动力力矩;C(v)为水下机器人科氏力及离心力矩阵;D(v)为水下机器人流体阻尼矩阵;g(η)为水下机器人重力与浮力矩阵,又称静力矩阵。
基于以上分析及方程,完善动力学相应模型并进行计算简化,由于水下机器人进行6个自由度内的运动,假设重心与动坐标系原点重合,此时Xg=Yg=Zg=0,根据式(5)可计算化简得到平动方程及旋转方程,如式(6)所示。

通过分析计算水下机器人在工作过程中的动力学方程,解出水下机器人的运动参数u、v、w、p、q、r,求解后根据式(1)、式(2)、式(3)反推出其静态坐标系下的运动规律,解算出位移量及偏转量。为了实现渔业养殖水域的需要,采用“前-后-上-下”四维度螺旋推进器的设计布局,如图4所示。

图4 水下机器人螺旋推进器布局方式及受力
2.2 硬件部分
2.2.1 主控制器水下机器人的主控制器采用Ar⁃duino Mega 2560。Arduino Mega 2560是 一 种 采 用USB接口的核心电路板,具有54路输入输出,编程简单,可在单个时钟周期内执行功能强大的指令,可为许多嵌入式控制工作提供可行且低成本的支持。通过接多电路模块及传感器可实现环境感知并提取相关数据。
2.2.2 避障模块水下机器人在水下工作过程中通过避障模块避免与水下不明物体发生碰撞。避障模块选用超声波传感器实现。超声波传感器测量障碍物与水下机器人的距离,根据需要控制指令设定避障方案[21,22]。其模块电路构成如图5所示。

图5 避障模块电路结构
式(7)所示测距公式可推断出水下物体与水下机器人前部相对位置关系。

式中,s为水下物体与水下机器人前部的距离;v为超声波在水中传播的速度;t为从发出脉冲到脉冲返回的时间。
水中超声波传播速度约为1 300~1 600 m/s。超声波在水中传播速度与水的浑浊度无明显关系[23];当温度为T时,文献[24]中得出了温度对超声波在水中传播速度v的近似解析式为:

由此绘制出如图6所示的函数关系曲线。

图6 不同水温条件下水下避障模块测距曲线
联立式(1)、式(2)可得到水下航行器避障装置某一温度下根据时间函数的测距公式。

水下机器人运动过程中会造成水下波动,有驱赶周围生物的作用,因此渔业养殖水下机器人避障模块主要用途在于避免水下机器人搁浅、水中异物及体积较大的水下生物,同时不会影响水生生物的生长发育。
2.2.3 定位导航模块水下机器人工作过程中的一大难点在于水下自主航位推算。水下机器人运用捷联式INS导航技术在水下进行定位和导航。捷联式定位导航较平台式INS占据的体积与空间较小,且更容易集成导航与控制于一体,通过加速度对时间的二次积分即可得到航行器位置[25]。由于卫星信号无法穿透水体传递至水下机器人,因此须通过线缆与水下机器人进行连接,上位机也可通过ROV线缆接收到水下机器人的姿态、速度和位置信息并显示(图7)。

图7 定位导航模块硬件电路
3 功能设计及实现
3.1 水质监测
水质监测主要包含多水域环境参数的监测,即实现水下机器人的水质检测相关数据采集工作,包括温度传感器、pH传感器、溶解氧传感器等[26-28]。温度传感器由NTC热敏电阻接桥式电路组成,精度高、电路简单且灵敏度强;pH传感器采用RMD-IS⁃DC2M12型pH传感器,适用于全pH范围区间,补偿温度-20~130℃,测量精度为±0.01℃,响应时间短;溶解氧传感器采用HQ30d哈希便携式溶氧仪,测量范围为0~20 mg/L,测量精度为0.01 mg/L。通过各传感器采集得到的数据为模拟数据,将模拟数据运送至A/D转换模块后输出至主控制器,由单片机完成数字量的采集与接续控制。为避免温度对试验测得参数的影响,外接温度补偿电路部分可对pH及溶解氧相关参数值进行校正。
水质监测包含以下3个步骤。①进入初始化操作,水下机器人系统所有操作清零。②主控制器发送采集命令至各水质监测相关传感器模块。③接收到主控制器发送命令时,各传感器检测相关水质数据并传输到主控制器模块,未接收到命令时保持休眠状态;通过LabVIEW搭建的上位机平台可观测并记录水质数据,如图8所示。

图8 远程监控上位机平台
3.2 水质改善
渔业养殖过程中通过pH调节、溶氧量调节等手段对养殖环境加以改善。水下机器人工作过程中对蠕动泵、电机转速加以控制,以实现水质改善功能[29,30]。
当主控制器得到水质相关数据参数超出上下阈值范围,输出相应的控制信号,控制对应水质改善模块的执行。水下机器人存液管中可存放一定量(约1 000 mL)的改善液,一般为石灰浆或氯化钾溶液,用以中和养殖塘内pH,以达到养殖生物的需要。
水下机器人的另一改善功能在于对溶氧量进行调节,设置工作水深为0,水下机器人工作与水面电机带动螺旋推进器运转的过程中,对局部溶氧量进行调节,带动空气中的氧气溶解于水中,从而起到良好的溶氧量调节效果。
4 试验测试
4.1 运动测试
完成水下机器人的硬件搭建并进行调试,将初代水下机器人装置置于校园某湖泊内进行运动测试试验,运动测试实际试验过程如图9所示。
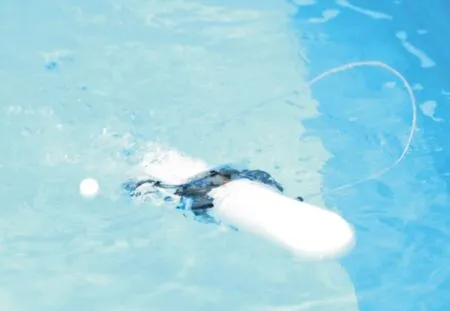
图9 水下机器人运动测试
设定航行深度为2 m时,根据上位机平台记录下水下机器人的运动轨迹如图10所示,水下机器人的运动过程可分解为开始下潜、下潜过程和到达指定深度三段。开始下潜过程依托舵机控制螺旋推进器产生向下的推力实现;下潜过程较快,上述步骤的螺旋推进器持续保持在相应角度并产生向下推力;到达指定深度附近,再次通过舵机调整螺旋推进器角度水平,推进接近巡航终点并控制其水平运动。整体运动状况在X-Y向投影大致为直线,与预期轨迹一致,微小扰动受定位系统精度影响可忽略。
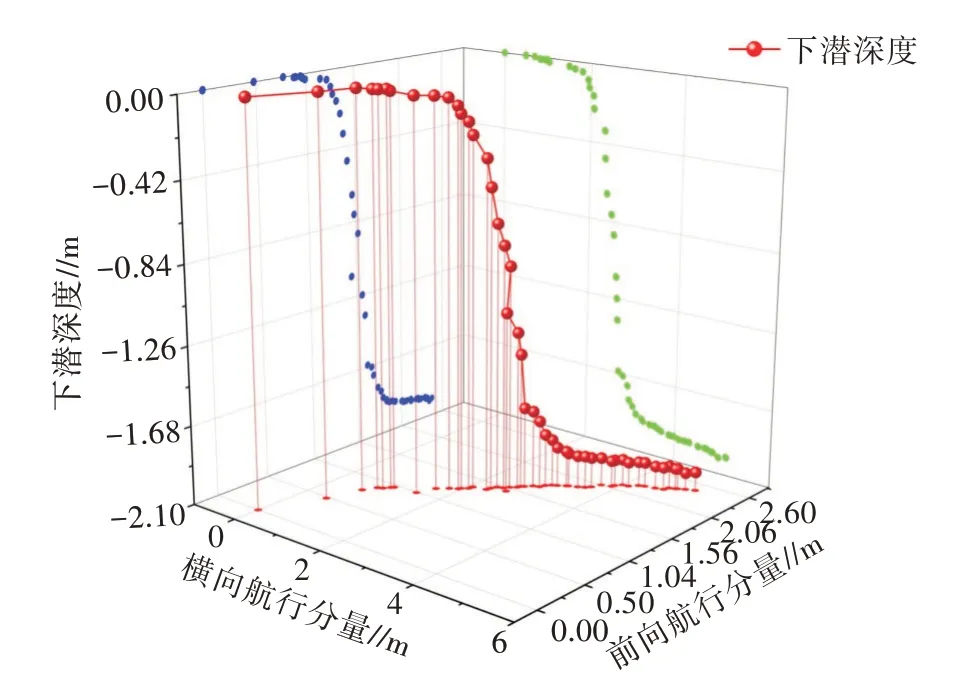
图10 运动轨迹记录
4.2 水质数据采集试验
为验证水下机器人能否在渔业养殖环境中完成水质监测功能,应在同一片水域中放置水下机器人,完成3次不同深度的相同水平路径航行,经过相应点位时在上位机平台上读取相应数据。在上述相同养殖水域中,测试时间为夜晚23:00至次日凌晨1:00,天气为阴雨天。采用有缆通讯的方式回传数据,预设深度值为0 m(水面)、1.0 m(静水层)和2.0 m(接近水底)时,考察某水域温度、pH及溶氧量指标时获取的数据如表2所示。
由表2可知,从不同深度条件下各采样点的水质参数可以看出该养殖水体呈碱性。由于测量时间及天气影响,其监测参数与理想状况存在一定差异,通过求取平均值可得到表3所示该养殖水域整体数据,试验结果能反映出不同采样点及不同水深环境下的水质参数。

表2 水质监测采样数据
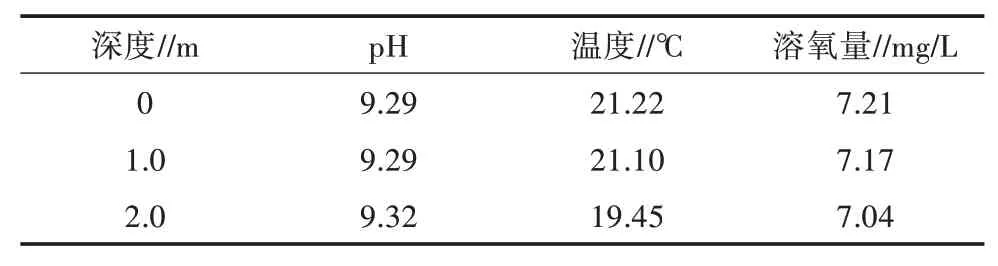
表3 水域水质分层监测结果
4.3 水质定向改善试验
从pH与溶氧量2项参数改善切入,为验证水下机器人调节养殖环境水质参数较传统调节方式的优越性及水质监测与水质改善的联动作用,选择上述水域外加一处自行配置的酸性水池,持续监测pH和溶氧量的变化。
试验时间及气象条件同上。人工经验调节pH与渔业养殖水下机器人在水域环境中自动调节效果对比如图11所示。水下机器人的自动调节方式较人工调节的优势在于,水下机器人能够根据水质监测的pH实时释放调节所需的石灰浆及氯化钾溶液质量,并通过水下机器人的运动进行自动搅拌,增强了pH调节的效率。
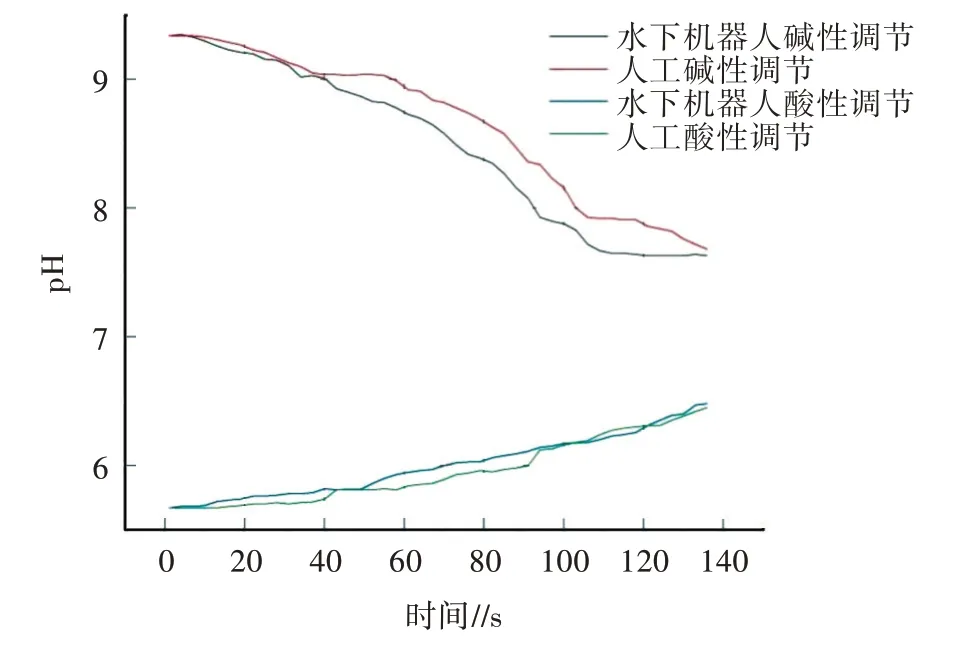
图11 水下机器人调节局部水环境pH抽样分析
在溶氧量调节试验中,通过单台水下机器人与单台420 W增氧机的实际效果对比,分析水下机器人在溶氧量调节方面的作用。测试结果如图12所示,由于增氧机仅能从固定位置输送氧气,因此其增氧效果较为平稳;水下机器人通过螺旋推进器作用促使水域“换气”,效果优于增氧机。

图12 水下机器人与增氧机溶氧量调节效果对比
传统方式的水质调控依赖人工经验完成,水下机器人通过自动pH调控、溶氧量调节,依附于其自主巡航功能可在各中小型渔业养殖池塘内完成作业,无需人为进入池塘进行水质调控,实现了安全性与高效性的统一[31-33]。
5 小结
渔业养殖过程与水质监测和水质改善密不可分,针对当前渔业养殖中常用的系列设备进行改进融合,达成了水质监测与水质改善两个过程的单一载体实现。既解决了渔业养殖过程中无法保证定点定深度且全天候动态监测的问题,又在相关参数与理想值出现偏差的情况下通过相关装置加以局部改进。最终证明在中小型养殖水域内该装置具有很强的实用性,动力学模型保证了水下机器人运动和控制的可靠性。针对中小型水域的运动、监测及水质改善实践,证明水下航行器在全水深工作和持续动态监测上优于无人船、浮标等相关装置,并将渔业水质监测和水质改善两个问题通过同一载体解决。后续在姿态控制问题上将继续开展相关算法和硬件电路研究工作,结合INS捷联惯性导航和卫星定位模块展开更精准的定位。水下机器人用于水质监测和水质改善的装置也拓展了水下机器人的用途,以高效的方式解决了渔业养殖过程中的相关难题。
猜你喜欢
环境(2023年5期)2023-06-30
汽车实用技术(2022年7期)2022-04-20
世界农药(2019年4期)2019-12-30
当代水产(2019年1期)2019-05-16
中国水产(2017年2期)2017-02-25
湖南畜牧兽医(2016年3期)2016-06-05
河南科技(2015年3期)2015-02-27
江苏年鉴(2014年0期)2014-03-11
河南科技(2014年23期)2014-02-27
河南科技(2014年18期)2014-02-27