基于自适应线性神经元的高压电缆状态监测及故障定位方法研究
2022-12-27 13:14胡裕峰张自远盛敏超李中龙
计算技术与自动化 2022年4期
胡裕峰,张自远,金 涛,盛敏超,李中龙
(江西省九江供电公司,江西 九江 332000)
通常以电流变化检测电缆早期故障,但故障电流相对较小,时间周期较短,从小于1/4周期到4个周期不等。由于以上两个原因,这些短时间内发生的电流变化无法被普通保护方案检测到。但实际中需要尽快检测出此类初期故障,以免造成故障扩大化[1-4]。
早期故障可指示电缆绝缘缺陷。绝缘材料的老化现象受到热、电、机械和环境等因素影响[5]。在上述因素中,电应力通常是导致电缆缺陷的最直接因素,局部放电是其典型的缺陷表现。电缆老化中,通过局部放电将水树转换为电树的过程复杂,并且可能以各种速率发生。在局部放电过程中,电流中存在高频分量,这一过程的频谱低于千赫兹,并且这种电流尖峰的性质是随机的[6]。这种情况可能会持续数天、数月或数年。最后,当绝缘层破裂时,产生具有主频的故障大电流。在这种情况下,电缆会遭受相当大的损坏,并且此过程会以附加速率重复,从而导致永久性故障的发生。
在文献[7]中,对用于识别和定位电缆中早期故障的技术方案进行了综述,还评估了每种方法的优点和缺点。文献[8]中提出了一种在早期故障条件下的电压和电流波形五个特征识别的算法。为了识别系统参数并表征观测到的早期故障,在文献[9]中基于时域和频域对电缆现场数据进行了评估。在文献[9]中提出了基于中性点电流的幅值和变化率来检测和清除暂态故障的方法。在文献[10]中,将基于规则和向量机的模式分类器用于地下电缆暂态故障的识别。上述方法大多都是基于小波技术,而且还没有得到实际应用的验证。在文献[11]中,提出了一种用于检测和定位初始故障的方法,计算出所有可能的故障点电压和电压THD,但是此方法仅对多周期早期故障有效。
考虑以上问题,提出了一种基于累积和算法以及自适应线性神经元的监测策略,从而检测单相瞬变和区分早期电缆故障。
1 故障模型
早期故障是电力电缆中的一种瞬变现象,典型的早期故障有两种类型:亚周期模式和多周期模式。亚周期故障总是发生在电弧燃点的电压峰值附近,持续大约1/4周期,并在电流过零时自清除。多周期故障也可能发生在电压峰值附近,持续1~4个周期,并在故障消失时自清除。图1是所研究的测试系统的单线图,包括4条架空线路和1条地下电缆,本文所有情况的采样率均为4kHz,系统的其他细节参照文献[12]。

图1 测试系统单线图
2 电缆早期故障识别方法
早期故障的检测包括两个方面:瞬态发生检测以及故障类型的确定。在检测到电缆上发生了瞬变后,重要的是要区分发生的瞬变是否为早期故障,以便发出必要的警报并做出适当的保护决策。否则,发生的瞬变可能发展为永久性故障。此外,瞬变还可能是负载变化、电容切换、浪涌电流和电机启动等自然工作情况,无须做出保护决策。
本文提出的早期故障的识别策略首先用累积和算法检测故障相。该算法速度很快,并且抗噪声。然后使用基于自适应线性神经元的方法将早期故障(亚周期和多周期)与系统中的其他自然工作情况区分开来。
2.1 瞬态事件检测
累积和检测过程是一组基于似然比的顺序过程,用于检测过程中的变化。对于许多常见的分布,检测过程一般简化为计算累积和,因此得名为累积和算法[13]。为了将其应用于电缆故障检测中,对电流信号进行采样,然后得到式(1)和式(2)中的以下两个量:
S1(k)=S(k)
(1)
S2(k)=-S(k)
(2)
其中S(k)是k时刻的样本,累积和算法检测原理如下:
q1(k)=MAX[q1(k-1)+S1(k)-p]
(3)
q2(k)=MAX[q2(k-1)+S2(k)-p]
(4)
其中q是检验结果,p是参考参数。如果式(5)对六个连续样本为真,则检测到瞬态发生:
q1(k)>b||q2(k)>b
(5)
其中b是故障检测的阈值,理想情况下为零。当累积和算法用于电缆故障检测时,p应等于继电器的最大调节电流。初始值的选择如下:
q1(k-1)=0,q2(k-1)=0,k=k0
(6)
由于式(3)和式(4)中存在算子MAX,输出q(k)将等于零或正值。零输出表示系统处于正常状态,而正输出表示通过的电流大于继电器的最大调节电流。如果六个连续样本的任何指标q1(k)或q2(k)大于阈值,则将记录为瞬态事件。为了说明该检测过程,图2(a)中给出了测试系统的相关电流信号S1和S2。假设在42.7ms时发生单相接地故障,继电器的最大调节电流为390A。为了优化算法性能,参考参数p应与继电器调节电流值相同。此外,假设在故障发生之前,390A的电流穿过继电器。q1(k)和q2(k)在图2(b)中给出。如图2所示,在故障发生之前,q1(k)和q2(k)都等于零。当故障发生时,正半周期内的故障q1(k)开始快速增加。q1(k)继续增长,直到当前信号进入负半周期。此时,q2(k)开始增长,而q1(k)也有一个非零值。累计和算法的效率在于:即使信号幅值降低,指标q1(k)和q2(k)也不会突然变为零。该特性提高了累计和故障检测算法的稳定性和可靠性。在本文中,识别指数定义如下:
qi(k)=q1(k)+q2(k)
(7)
该指数的优点是同时使用了q1(k)和q2(k)。在这种情况下,波形跟踪更合适。图2(c)给出了图2(a)中故障或瞬态判据。

图2 累积和检测示意图
2.2 故障相的确定
当故障发生时,指数qi(k)根据故障发生角度开始增加。如果六个连续样本满足故障记录条件,算法将该情况确定为瞬态事件。为每相的电流确定指数qi(k),一相或两相的发生故障可能导致健康相的瞬时波动。当系统中出现瞬变时,算法会搜索故障相。当识别指数第一次检测到瞬态事件时,可以观察到指数qi(k)在所有故障相都增长了,而健康相指数值非常接近零。这意味着可以通过确定非常低的阈值(接近零),将每个相位的相应指数与该阈值进行比较,就可识别出故障相。
此外,采样频率影响检测时间和检测所需的样本数量。当采样频率为4kHz时,所需的检测时间为1.5ms(对应于故障开始后的第六个样本);而当采样频率降低到500Hz时,所需的检测时间变为6ms(对应于故障开始后的第三个样本)。
2.3 自适应线性神经网络的建立与训练
自适应线性神经网络是一个两层神经网络,最早由斯坦福大学的Windrow Hoff提出[14]。其有n个输入和一个输出,输出等于输入的线性组合,其主要特点是:(1)基于输入变化和目标响应的在线训练;(2)适用于权重训练的自适应算法;(3)结构简单,便于在硬件上实现。
为了跟踪任意信号并提取其谐波,使用了自适应线性神经网络。任意信号可定义为:
(8)
其中β是阻尼时间常数,N是谐波总数,ω为基频,Adc(1-βkTs)表示瞬态直流分量扩展的前两项,Ts=2π/ωNs,Am和Bm分别等于Fmcosφm和Fmsinφm,Fm和φm分别是m次谐波的幅值和相位,t(k)是第k个采样时间。X(k)是输入向量,定义如下:
X(k)=[sinωt(k)cosωt(k)…sinmωt(k)cosmωt(k)(1-kTs)]T
(9)
假设θ(k)是自适应线性神经网络权重向量,神经网络输出等于θ(k)和X(k)的内积:
(10)
使用基于最小二乘误差(LES)方法来训练神经网络。权重校正按如下方式进行:

(11)
其中θ(k)和θ(k+1)分别是时间步k和k+1的权重向量。X(k)也表示时间步k的输入向量。e(k)定义为f(k)的误差,α是训练速率。为了准确跟踪波形f(k),e(k)应该为零或大于阈值。在这种情况下,f(k)如下:

(12)
其中θ0是误差收敛到零时的权重向量,定义如下:
θ0=[A1B1…ANBNAdcβAdc]
(13)
通过获取权重向量,可以从式(14)和式(15)中计算出谐波分量:
(14)
(15)

(16)
因为E取决于权重和期望的输出,所以可以调整权重,使得E下降到最低值。温德罗-霍夫训练规则基于最速下降法,均方误差可以使用每次迭代中的平方误差来获得。如果对于第k次迭代中的权重和偏差存在平方误差的部分导数,可得:
(17)
为保证训练稳定性,训练速率应小于输入向量协方差矩阵XT(k)X(k)最大特征值的倒数。因此,权重增加值等于:
(18)
为了确保在存在随机噪声的情况下更快地收敛,需要非线性权重匹配算法。因此,将权重调整算法改写如下:

(19)
其中ψ(k)定义如下:
(20)

(21)
由威卓尔-霍夫规则可知,网络权重变化与输出误差和输入直接相关。在所提出算法中,不需要计算导数,因此算法计算速度较快,可快速收敛。而且根据式(18),每次迭代中的数学运算仅需要2N次乘法,(N+5)次求和。因此硬件实现非常简单,适合在线应用。
神经网络训练过程包括以下三个步骤:(1)网络输出f(k)=θ(k)XT(k)和误差的计算。(2)总平方误差(E)与目标误差(E0)的比较,如果E小于E0,或者训练迭代次数达到最大值,则停止训练,否则继续。(3)更新权重[θ(k+1)=θ(k)+Δθ(k)],然后返回步骤(1)。
2.4 故障类型识别
基于电容切换、负载变化、单相接地故障、实际电缆早期故障等瞬变状态,以及测试系统真实早期故障数据,对神经网络进行训练以识别故障类型。式(22)给出了用于区分早期故障类型的指标:

(22)
θ1和θ2代表第k个样本中的神经网络权重因子,HI是第k个样本中的谐波指数。HI基于故障相电流一次谐波,识别早期故障的机制如下所示:(1)如果指数HI(k)在1/4功率周期大于Tr,则瞬态被识别为亚周期故障。(2)如果指数HI(k)在超过1/4周期且少于4个周期的情况下大于Tr,则该瞬态被识别为多周期故障。(3)如果指数HI(k)超过四个周期时大于Tr,瞬态不属于早期故障。对于测试系统中电缆,经过试验,Tr的值确定为700。
3 仿真分析
在这一部分中,通过广泛的模拟,在不同的情况下评估了所提出的方法的性能。
3.1 案例分析
模拟了一个多周期早期故障发生在如图3所示系统的电缆中。t=822 ms时,故障发生在A相。图3(a)给出了从电流互感器采样点得到的A相、B相和C相的电流波形。所提出的算法在t=823.75 ms时检测到瞬变,即在瞬变出现1.75 ms之后即实现检测。在这种情况下,故障类型分类算法被激活。在t=839 ms时,HI(k)大于Tr值。这意味着瞬态事件有可能是早期故障。由于HI(k)大于Tr持续超过1/4周期且少于4个周期,分类算法认为这是多周期早期故障,并发出所需的报警信号,图3(b)给出了决策过程。

图3 多周期早期故障
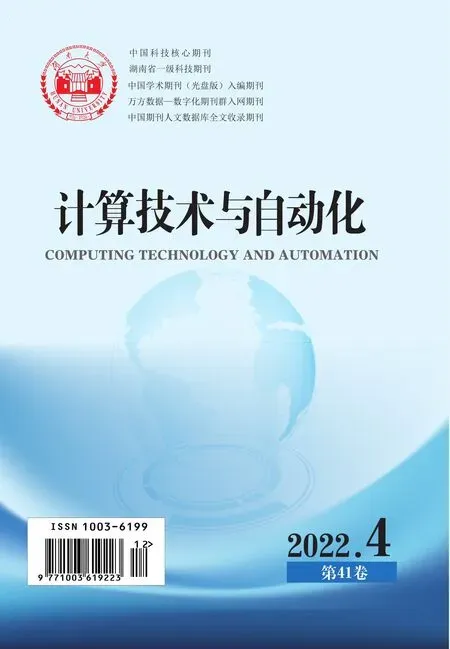
在第二种情况下,模拟电缆中出现亚周期早期故障。如图4(a)所示,瞬变从t=1.343 s开始,持续5 ms。HI(k)指数在4 ms内保持大于Tr,此后衰减至400。因此,所提出的故障检测算法认为这种瞬变是亚周期早期故障,图4(b)给出了决策过程。
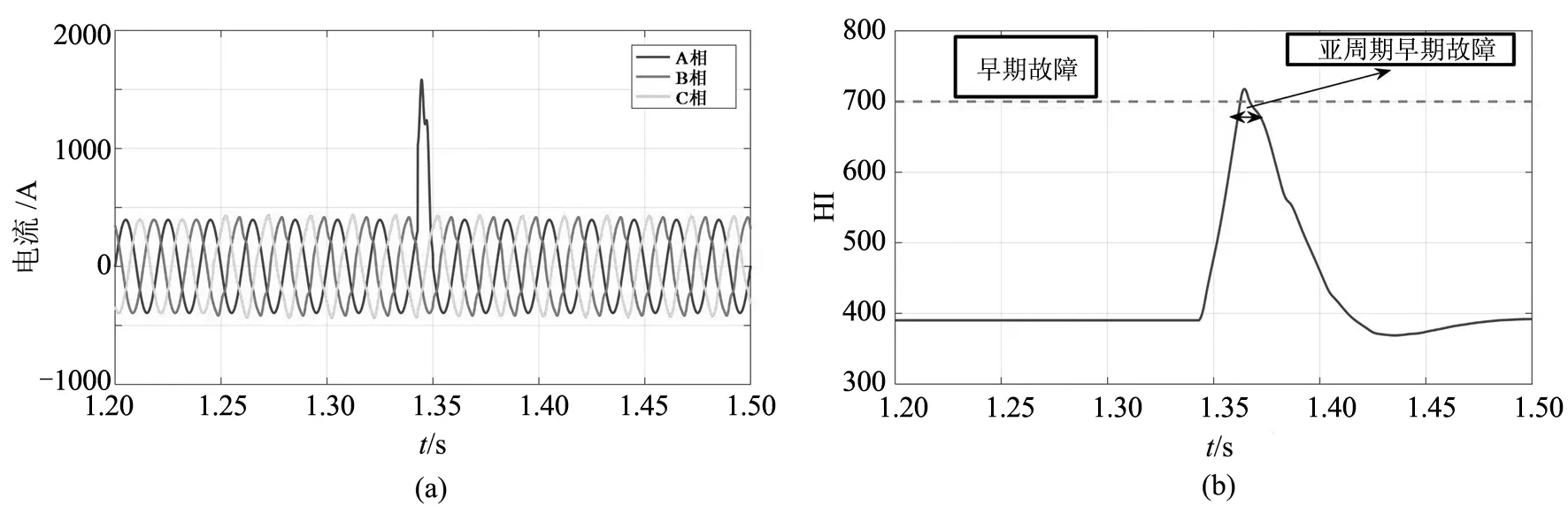
图4 亚周期早期故障
在第三种情况下,电缆中出现电容切换瞬态事件。如图5(a)所示,瞬态事件开始于t=225 ms。HI(k)指数一直小于Tr值。因此,所提出的故障检测算法不认为这种瞬态事件是早期故障,图5(b)给出了决策过程。
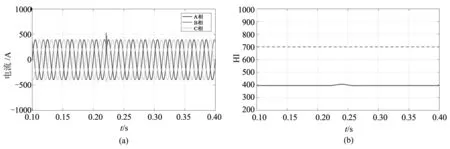
图5 电容切换瞬态
在第四种情况下,网络中发生负载变化。如图6(a)所示,瞬态事件开始于t=288 ms。HI(k)指数不超过Tr值。因此,所提出的故障检测算法不认为这种瞬态事件是早期故障,图6(b)给出了决策过程。
在如图6所示系统上模拟了各种故障和瞬态事件,如亚周期故障、多周期故障、单相接地故障、电容切换、负载变化、涌入电流和电机启动等。在不同阻抗、不同故障起始角、不同电压幅值、不同位置产生瞬态情况,总共分析了469个不同的故障和瞬态事件。其中一些情况涉及噪声污染情况,以评估所提出方法的抗噪声性能。表1给出了故障检测几分类结果。结果表明,所提出的方法几乎可以正确地识别所有早期故障,且误差可以忽略不计。

图6 负载变化瞬态
表1 不同事件的检测准确率
为了全面评估所提出的方法,还分析了另一种系统配置。在电缆后以及其他线路上添加了新节点,以及在新节点位置使用电机和电容组,以实现新配置。由于电缆早期故障的数据是从指定网络获取的实际运行数据,新配置中电缆的位置与先前配置相同。在这种配置下,分析了一组故障情况(35种情况)和一些正常情况(150种情况),如单相接地故障、电容切换、负载变化、浪涌电流和电机启动。所提出的方案在上述第三种情况的准确率为99.156%(表1),在新配置下该值仅下降约2%,降至97.165%。因此,在系统配置发生变化的情况下,所提出的方法也具有很高的可靠性。
3.2 与其他方法比较
在本节中,考虑160种不同模拟情况和40种实际早期故障,将提出的检测方案与其他方案进行比较。表2给出了不同方案的评估结果。文献[8]中提出的方案是一种基于电缆早期故障五个主要特征的识别算法。文献[9]中提出的方案基于S变换和支持向量机,而文献[15]中介绍的方法基于卡尔曼滤波。可以看出,在所有方案中,本文提出的算法达到了最高准确率,所需平均检测时间也最短。

表2 不同方法的检测准确率
4 结 论
提出了一种监测策略,用于检测地下电缆的早期故障。所提出的方法可实现两个功能:检测单相瞬变,识别早期故障。这两个功能通过使用累计和算法实现。由于累计和算法具有抗噪声能力,因此所提出的方法在噪声污染情况下具有一定抵抗能力。对各种场景的模拟数据和实际数据的分析证明了所提出方法的有效性。此外,该方法还具有精度高、速度快的优点。
猜你喜欢
防爆电机(2020年3期)2020-11-06
当代陕西(2020年17期)2020-10-28
趣味(数学)(2019年12期)2019-04-13
人大建设(2018年5期)2018-08-16
电信科学(2017年6期)2017-07-01
中国科技信息(2016年6期)2016-08-31
中国光学(2015年5期)2015-12-09
中国石油大学学报(自然科学版)(2015年2期)2015-11-10
中国科技信息(2015年23期)2015-11-07
空间控制技术与应用(2015年1期)2015-06-05