
上海光源超导三次谐波腔低电平研制
2022-12-22 14:34张志刚赵玉彬赵申杰马震宇蒋鸿儒杨文峰黄雪芳侯洪涛
核技术 2022年12期
张志刚 赵玉彬 徐 凯 郑 湘 常 强 赵申杰 马震宇 蒋鸿儒杨文峰 黄雪芳 王 岩 是 晶 侯洪涛
(中国科学院上海高等研究院 上海 201204)
束流寿命是同步辐射光源的最重要设计参数之一,其中托歇克散射是影响束流寿命的主要因数[1‒2]。随着上海光源越来越多插入件的安装和调试使用,提高束流寿命将成为一个重大挑战。在二期升级建设中,上海光源自主研制的超导三次谐波腔已安装就位并通过束流测试,达到拉伸束团提高束流寿命的目标。
谐波腔的工作模式有主动式和被动式两种。与主动式谐波腔相比,被动式谐波腔具有以下特点:1)无需高频功率源提供功率,环路控制结构相对简化,谐波腔在正常工作时,束团相对感应电压的相位基本不变,束团拉伸只通过调节调谐器;2)对于固定流强条件下,感应腔压的相位和幅度关系固定,无法同时满足幅度和相位皆处于最佳拉伸状态,故总的拉伸效果低于主动式谐波腔;3)因依赖束流流强建立腔压,低流强条件下应用受限。由于被动式谐波腔不需要高频功率源提供功率,故在工程实施和成本预算方面具有较大优势,目前国际和国内的主流皆采用被动式谐波腔。如国际上瑞士的SLS(Swiss Light Source)[3‒4]与意大利的Elettra[4]的超导三次谐波腔,美国的APS-U(Advanced Photon Source Upgrade)[5]和NSLS-II(National Synchrotron Light Source II)[6‒7]的超导四次谐波腔,国内合肥光源的常温四次谐波腔。其中,SLS和合肥光源的谐波腔的控制均采用的系统是PLC控制系统,合肥光源的控制器通过调节慢速电机使谐波腔腔压的稳定在(40±0.5)kV范围[6]。
上海光源二期高频系统(如图1)包含超导三次谐波腔、低电平控制器、信号监测和联锁控制器、电机驱动器等,各设备的简要功能作用介绍如表1。
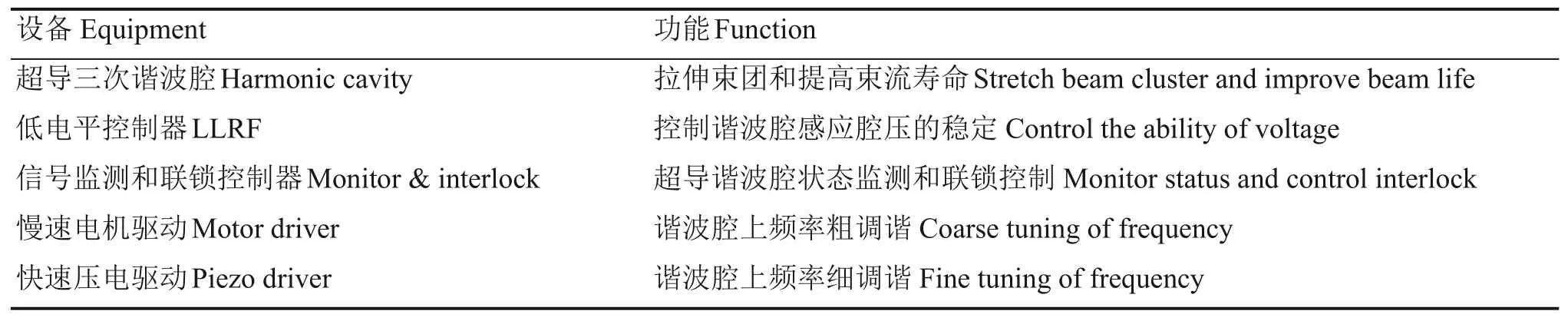
表1 上海光源高频二期设备功能简介Table 1 Equipment function of SSRF phase II

图1 上海光源二期高频系统框图LLRF—低电平控制器,Feedback—感应耦合的腔压信号,Beam—束流位置探测信号Fig.1 Block diagram of RF system at the phase II of SSRF LLRF—Low level radio frequency,Feedback—Coupling voltage,Beam—Beam position monitor
1 谐波腔模型及腔压
谐振腔可等效为图2所示的并行谐振电路模型,Rs是谐振腔的分路阻抗,Ib是平均电子束流的镜像电流,C和L分别为谐振腔的等效电容和电感[8‒10]。
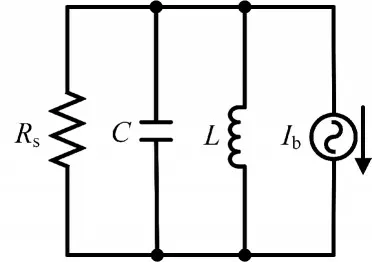
图2 谐振腔的网络模型Fig.2 Model of electrical model of resonance cavity
谐振腔的谐振角频率可以被表示为:

谐振腔的阻抗可以被表示为:
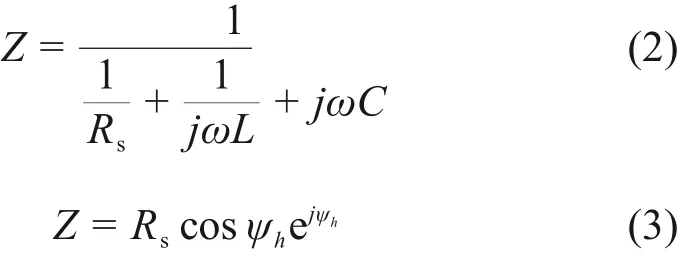
ωrf是储存环的高频角频率,根据等效的电路模型,束流经过谐振腔所感应的电压为[2,10‒13]:

在频率为nω的谐振腔中感应的电压为:

上海光源主高频有3台500 MHz的超导腔,在三次谐波腔投入运行后,束团感应的加速电场是主高频腔压和谐波腔腔压之和。束团在前进时受到谐波腔压调制,实际长度随之改变,从而达到拉伸的目的,其总腔压可表示为:

式中:Vrf是主高频系统的峰值电压;ωrf是储存环的高频频率;ϕs是同步相位角;ψh是相对谐波相位;n是谐波数。
上海光源三次谐波腔参数如表2所示[2,14‒15],图3为高频腔模拟计算值。

表2 上海光源三次谐波腔参数Table 2 Parameters of SSRF harmonic cavity

图3 高频腔压模拟计算结果Fig.3 Simulation result of the voltage of the RF system
2 控制原理
超导三次谐波腔的低电平控制器的控制目标是通过慢速步进电机和快速压电陶瓷(piezo)的协调控制手段,将谐波腔的腔压幅度稳定在±1%,由于上海光源的谐波腔工作于被动模式,唯一可调的参数只有失谐角。
上海光源三次谐波腔低电平控制器原理图如图4所示,入射信号包括参考信号、谐波腔感应腔压信号以及束流位置探测器(Beam Position Monitor,BPM)感应信号三路射频信号。束流位置探测器感应信号实时反馈流强信息;谐波腔感应腔压信号实时追踪谐波腔腔压信息;以谐波腔的参考信号为基准,以感应腔压信号与基准信号的差值作为失谐方向的判据。为了与上海光源储存环高频的低电平控制器兼容,采用的中频信号频率为31.25 MHz。

图4 上海光源三次谐波腔低电平控制器原理图Fig.4 Schematic diagram of the LLRF controller in 3rd harmonic cavity at SSRF
三次谐波腔低电平的控制模式分为自动闭环和人为干预闭环两种工作机制。其中,在自动闭环机制下,当流强大于设定阈值,环路自动闭环;在人为干预闭环机制下,可通过调节慢速电机的位置和piezo电压值使谐波腔处于拉伸状态。
传统的调谐方式一般都是单独采用慢速调谐和人为干预闭环机制来实现腔压的稳定,无法实现腔压的高稳定性和智能化操作。本项目设计了慢速步进电机和快速压电陶瓷协同控制的策略,达到腔压控制的稳定性要求。接下来将对束流信号处理、piezo电压与位移的关系和控制算法进行介绍。
2.1 束流信号处理及测量
加速器束流位置测量系统常用的信号处理方法有差比法、对数比、幅相转换、幅时转换等方法[16‒17]。综合考虑束流运行参数、现场环境和束流动态范围大等特点,在三次谐波腔的控制中,采用了对数比的信号处理方法,具体流程如图5所示,包含对数检波器(Detector)、低通滤波器(Low Pass Filter,LPF)、信号放大器(Amplifier)、模拟数字采集模块(SDAC)和现场可编程门阵列(Field-Programmable Gate Array,FPGA)等器件;束流信号经图5处理后在不同流强得到的数据如图6,R2为0.9943,具有较好的线性,为§2.3中闭环控制中流强阈值设置做参考。

图5 束流信号测量流程框图Fig.5 Flow chart of the measurement beam sign
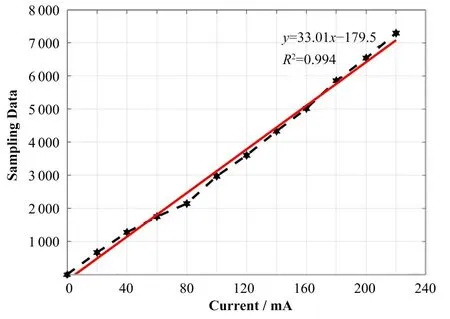
图6 束流信号经检波、滤波和放大后采集的数据Fig.6 Data collected after detecting、filtering and amplification
2.2 Piezo性能介绍和电压位移关系
压电陶瓷(piezo)是一种能够将机械能和电能互相转换的功能陶瓷材料,具有压电性、介电性、弹性等特质,兼具分辨率高、响应快、功耗小、高动态和最大可实现毫米的运动范围的优点[2],同时封装陶瓷具有机械强度高,便于安装固定,可承受轴向拉力,抗干扰强,稳定性高和保护陶瓷等特点,本项目采用的是机械封装压电陶瓷。
压电陶瓷自身的结构特性对超导腔的调谐性能产生直接影响,尤其是固有特性中的迟滞特性与非线性。在工作电压范围内,压电陶瓷升压曲线和降压曲线实验数据测试如图7不是重合的,在控制器中,系统下一时刻的输出不仅取决于当前时刻的输入和输出,还取决于其处于升压过程还是降压过程,且上升曲线和下降曲线之间没有对称轴,以上这些特性,对控制算法提出更高的要求,压电陶瓷的迟滞一般在设定电压对应位移值得的10%~15%[18]。
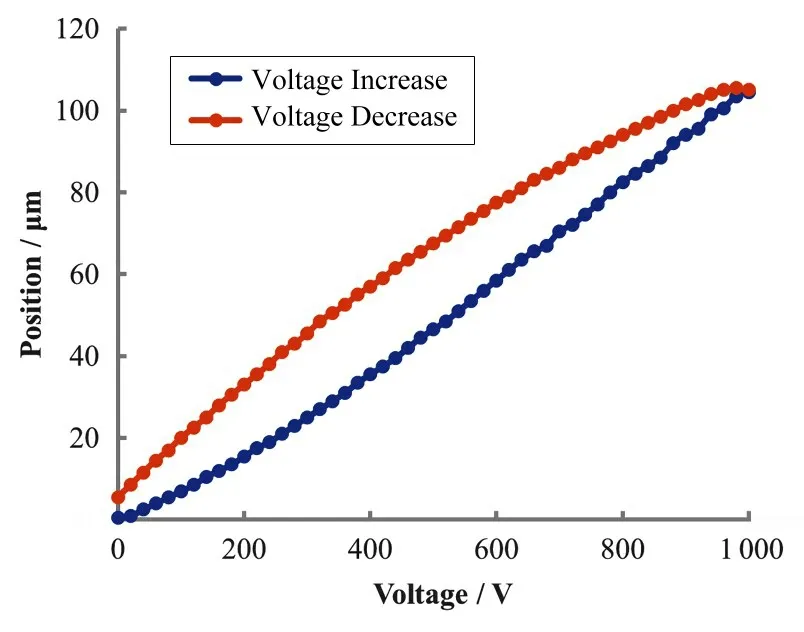
图7 Piezo电压(0~1 000 V)与位移实验数据测试(升压和降压曲线)Fig.7 Experimental data of piezo voltage and displacement(increase or decrease)
2.3 控制算法
三次谐波腔频调环路控制原理框图如图8所示。以谐波腔的参考信号为基准,以感应腔压信号与基准信号的差值作为慢速调谐电机和快调谐piezo的控制输入,考虑控制功能的独立性与安全性,将慢调谐电机的控制环路和快调谐piezo的控制环路独立设计。

图8 频调控制方案简图Fig.8 Brief schematic of the controller in tuner
慢调谐电机和快调谐piezo都有开环控制和闭环控制两种模式。在开环模式下,慢调谐电机是通过人机交互界面手动控制慢调谐电机的使能和方向,通过位移传感器信号或实时谐波腔腔压反馈来决定电机是否需要继续动作;快调谐piezo的控制采用人机交互界面手动设置piezo驱动电压,并通过实时谐波腔腔压反馈来人为决定是否需要继续进行调节piezo驱动电压。
在闭环模式下,频调环路采用电机慢调谐和Piezo快调谐协同控制策略,电机负责大范围的粗调谐,而piezo负责细调谐,两者的运行阈值关系如图9所示。为保证闭环控制的安全性,设计有感应腔压阈值,即当感应腔压幅值大于设置阈值时,闭环有效,反之无效。
慢调谐的闭环模式控制:为了减少步进电机的动作频度和延长使用寿命,采用二级阈值控制,具体如图9所示。△Amp表示谐波腔频率的活动范围,±Th2表示谐波腔频率控制环路启动马达阈值设置,±Th1表示谐波腔频率控制环路马达停止阈值,谐波腔慢调谐闭环频率差值与电机动作解析如表3所示。
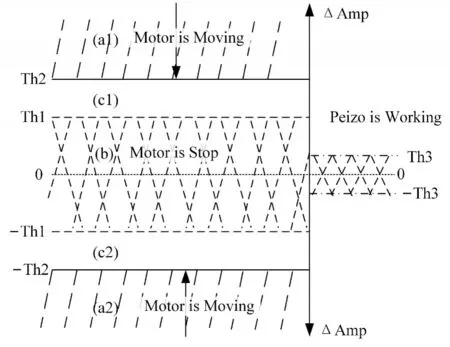
图9 慢调谐和Piezo快调谐阈值关系图Fig.9 Tuning thresholds related to the status of motor(slow tuning)and piezo(fast tuning)

表3 慢调谐闭环频率差值与电机动作解析Table 3 Analysis the relation between the difference of frequency and status of motor in close loop
Piezo快调谐的闭环模式控制:在闭环控制时,piezo始终处于调谐状态,±Th3表示谐波腔频率在此范围内piezo工作电压不改变,考虑piezo工作的安全性和实际工作电压需求,其工作电压必须≥0,故在设计时,可设置piezo最小输出电压(≥0)和最大输出电压。
2.4 Quench逻辑设计及测试
因三次谐波腔为被动腔,没有功率源提供入射信号,只能采用参考信号与感应腔压信号来设计quench联锁条件,当前项目使用的联锁触发条件如下:当探测到的腔压与设定值的绝对值大于设定的阈值时,超导腔处于失超状态,激活并输出quench联锁信号,对谐波腔工作环境异常判断进而通过主高频作出对应响应保护谐波腔,判定流程如图10所示。为便于故障追查,联锁信号增加锁存功能(图10中的quench_latchout)。

图10 Quench判定流程图Fig10 Chart of the judgement on quench
在工程应用,quench保护响应慢会对谐波腔的安全运行带来隐患,故对quench判定时延较为关注,通过软硬件设计及开发,失超探测功能通过联调,经测试(如图11所示),低电平探测判定quench联锁信号传给谐波腔的PLC时延约为16 μs,谐波腔的PLC接收到quench信号,然后再反馈给主高频的发射机的时延约为62 μs,主高频的发射机接收到quench联锁信号并做出响应的时延约为100 μs,即当低电平控制器监测判断quench联锁信号到主高频对此信号做出响应时间在200 μs以内,满足使用需求。
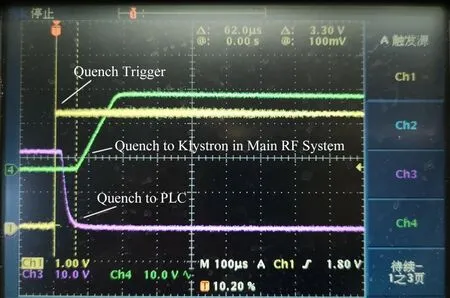
图11 Quench延迟实测(Quench触发、PLC接收到Quench信号、发射机接收到Quench信号)(彩图见网络版)Fig11 Delayed measurement of quench signal(Quench trigger,Quench to PLC,Quench to klystron in main RF system)(Color online)
3 束流稳定性测试和束流寿命改善测试
当束流在120 mA top-up工作模式下,谐波腔正常工作时幅值稳定度由开环的±5%(图12(a))提高到闭环的±1%(图12(b))以内,如图12所示,达到设计指标,将数据列出来如表4。在闭环工作模式下,piezo电压波动范围在120 V范围以内,无陡升陡降,如图13所示,既提升了piezo的使用寿命,又得到了输出电压平滑稳定的效果。
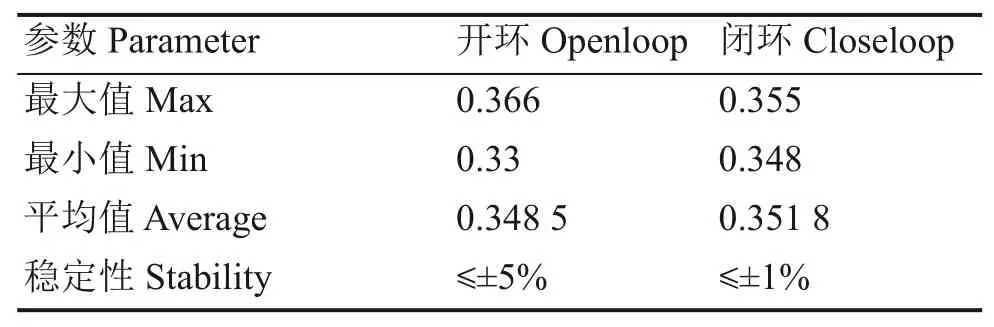
表4 谐波腔幅度稳定性测试结果Table 4 Test results of amplitude stability in SSRF harmonic cavity

图12 腔压幅度稳定性比较(a)开环≤±5%,(b)闭环≤±1%Fig.12 Amplitude stability comparison of cavity voltage(a)Open loop within±5%,(b)Close loop within±1%
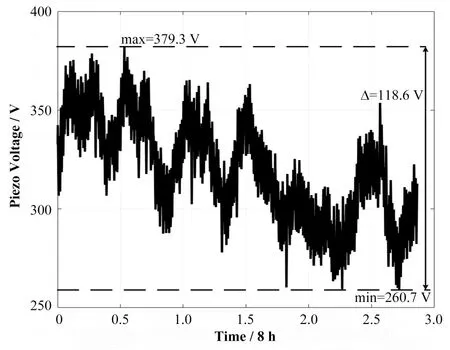
图13 Piezo电压输出Fig.13 Output voltage of piezo
在主高频提供的总腔压为4.5 MV的情形下,束流强度为200 mA时,谐波腔未工作时束流寿命为5.27 h,谐波腔工作时束流寿命能达到11.7 h,如图14所示,束流寿命得到极大改善,同时束团长度从55 ps拉伸到116 ps。
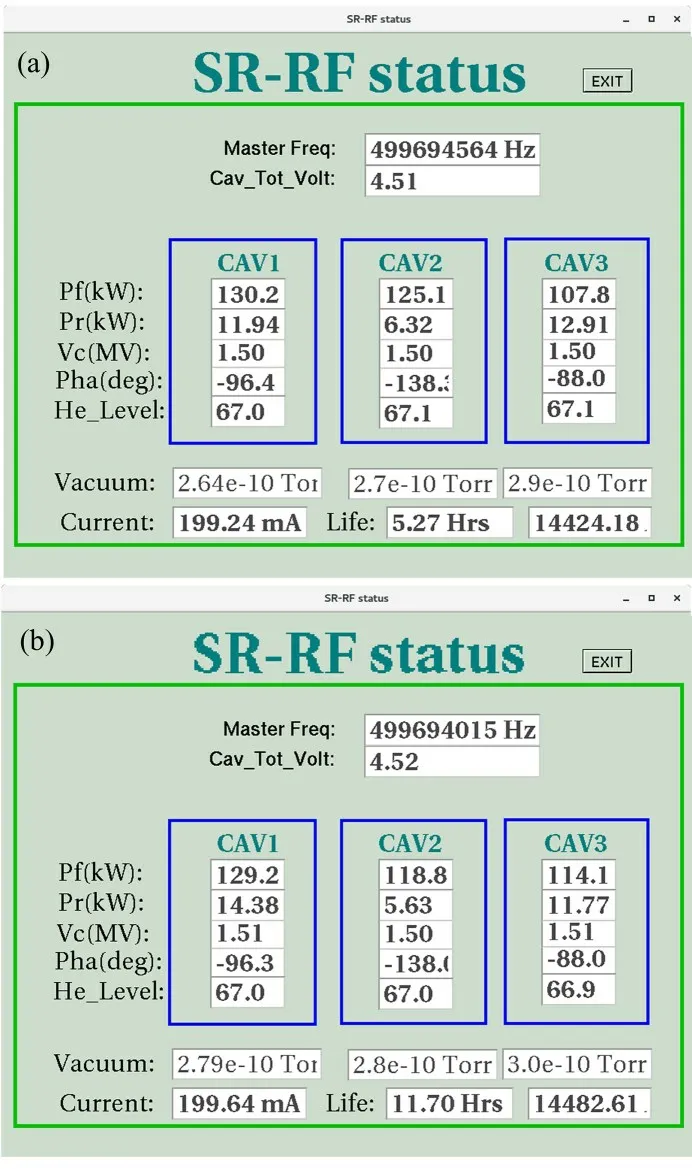
图14 束流寿命改善测试(a)未拉伸,(b)拉伸Fig.14 Improvement of beam life(a)Not stretched,(b)Stretched
4 结语
本文描述了上海光源被动式超导三次谐波腔的数字化低电平控制器的研制,解决了慢速电机和快速piezo协同控制的策略。经在线测试,在超过
120 mA正常工作状态下,谐波腔感应腔压的幅度稳定度由开环控制的±5%提高到闭环控制的±1%以内,达到设计指标,piezo电压波动范围在120 V范围以内,达到输出电压平滑稳定的效果,同时quench延迟在200 μs以内,满足使用需求。在流强为200 mA和储存环高频提供的同等腔压条件下,谐波腔处于工作状态时束流寿命提高1倍以上。
作者贡献声明张志刚:负责控制器的硬件板卡的设计、搭建、测试、软件设计和调试、桌面测试、在线联调、数据收集整理、文章的起草和最终版本的修订;赵玉彬:负责控制器的硬件板卡的设计、软件设计、控制逻辑合理性建议、项目的监督和管理;徐凯:负责基于LinX上层软件开发和数据收集;郑湘:负责硬件板卡的设计、软件设计合理性建议;常强:负责系统调试和实验数据合理性判断;赵申杰:负责联锁判断和实验数据合理性判断;马震宇:负责步进马达离线测试;蒋鸿儒:负责基于LinX上层软件开发和数据收集;杨文峰:负责数据收集整理;黄雪芳:负责基于LinX上层软件开发和数据收集;王岩:负责步进马达和Piezo性能离线测试;是晶:负责系统在线调试和数据收集;侯洪涛:负责项目的监督和管理、系统在线调试和数据收集。
猜你喜欢
中国交通信息化(2020年4期)2021-01-14
原子能科学技术(2019年9期)2019-09-14
原子能科学技术(2019年9期)2019-09-14
汽车维修技师(2018年7期)2018-12-07
电子技术与软件工程(2017年10期)2017-06-02
黑龙江电力(2017年1期)2017-05-17
电子技术与软件工程(2017年2期)2017-03-15
核技术(2016年3期)2016-04-19
西北工业大学学报(2015年3期)2015-12-14
浙江理工大学学报(自然科学版)(2015年4期)2015-03-01
