基于水下物联网技术的智慧海洋牧场建设
2022-12-21 07:41刘修泽
无线互联科技 2022年19期
于 喆,吉 光,刘修泽∗
(1.辽宁省海洋水产科学研究院,辽宁 大连 116023;2.辽宁省海洋生物资源与生态学重点实验室,辽宁大连 116023;3.大连市渔业资源养护重点实验室,辽宁 大连 116023)
0 引言
地球表面70%以上被海洋覆盖。我国是海洋渔业大国,大陆海岸线总长达到1.8万km。海洋是人类的重要蛋白质来源,但随着过度捕捞和生态环境等问题,许多海洋渔场已经资源枯竭。随着世界各地从事海洋渔业生产的人员越来越少,人们越来越担心目前的海产品来源是否还能满足全世界需求[1]。海洋牧场是一种绿色的渔业生产模式,其告别了单纯的水产捕捞和养殖,是充分利用自然生产力,通过海洋工程技术、设施渔业、信息技术等方式,实现的系统性海洋渔业工程,能够促进渔业生产和生态环境的和谐发展。海洋牧场建设不仅具有经济效益,也是渔业碳汇的重要手段之一。海洋中的藻类可以消耗空气中的碳,其在水下的繁衍生长相当于陆上的植树造林;以碳酸钙为主要物质的贝类生物的生长需要消耗较多的二氧化碳,是优良的碳汇生物。滤食性鱼类的生长栖息、增殖放流以及人工鱼礁的修建,构造出了一套从初级的藻类到贝类、鱼类的完整生态系统[2]。根据联合国环境规划署报告,海洋生物固定了全球55%的碳,发展渔业碳汇事业是我国实现双碳战略目标的有效途径。
智慧海洋牧场的“智慧”一词来自IBM曾经提出的“智慧地球”的概念。现代海洋牧场的建设也已经向信息化、智能化转变,建设“智慧型海洋牧场”是未来的发展趋势[3]。智慧海洋牧场的建设离不开信息技术的支撑,只有全面的掌握水下的信息,才能有效地开展牧场的作业生产、环境效应监测和评估,从而更好地对牧场进行运营。然而海洋环境信息的长时序连续实时获取仍然面临诸多严峻的挑战,传统人工的海上和水下作业无疑在时间的连续性、空间覆盖范围、安全性等方面存在较多弊端。水下物联网技术(Underwater Internet of Things,UIoT)是陆上物联网的扩展,是实现智慧海洋的强有力技术,UIoT是通过自主水下航行器、智能传感器、水下通信技术和水下路由协议的最新发展实现的[4]。在未来,UIoT将实现水下的万物互联,为水下多种技术和实体架起桥梁,成为连接水下物体的智能网络,并具有自我学习和智能计算能力。
1 体系架构
智慧海洋牧场的发展目标是对牧场范围内的海洋和渔业信息进行有效的感知、采集、传输、交互、存储和分析应用,进而为水下任务的完成和牧场的管控经营提供信息保障。本文根据UIoT的相关技术,智慧海洋牧场的总体框架分为5层:应用层、控制层、数据层、网络通信层、感知层。
1.1 应用层
应用层主要是指服务海洋牧场建设运行的各类软件系统应用。通常主要有:(1)水质环境监测系统:可实时在线对多目标点的海水理化参数进行监测,监测数据通过网络汇集到数据中心,用户可随时查阅各监测节点的特定时间段的水质数据,并具备分析变化趋势的功能[5]。(2)鱼类行为监测系统:可进行基于视频图像的鱼类行为学研究,通过图像解析、目标检测、机器学习来寻找鱼类的行为规律,替代人工水下摄影,为水下生物资源评估提供依据,更好的监测牧场中鱼类的生长状况。(3)生态资源分析系统:通过环境数据、资源量数据、物理海洋数据建模,进行综合分析,对牧场中的海洋生态健康状况、渔业资源量进行分析和评估。(4)深海网箱饲养系统:实现大型网箱的水质环境、鱼类活动行为的监控、饲料自动和远程控制投喂、病害预警等功能。
1.2 控制层
该层负责控制信息管理、资源调度。任务指令由岸基控制指挥中心下达,目标设备按照指令完成任务。但由于存在海面、水下、空中等多节点的转发,会产生指令发送的延迟。指挥中心并不能及时获取水下资源情况。因此,一般通过边缘节点来完成资源的调度和指令的转发。边缘节点是水面上能量和计算能力较强的设备,如母船、水面工程平台等,它们将根据实际情况对水下任务的分配进行优化,并发送指令给水下自动潜航器(Autonomous Underwater Vehicle,AUV)、传感节点等设备。水下任务的完成存在较多不确定性和复杂性,在受海流影响的三维环境下,航行设备的路径规划,数据传输的路由规划,任务的最优分配,均需要边缘节点进行复杂的运算[6]。
1.3 数据层
数据通过各类传感器进行采集、暂存后,传输到各中转节点,最终在岸基指挥中心进行汇集管理,供各应用系统进行使用。在整个数据的存储转发过程中,由于涉及的传感、网络设备多样多源,需要设计标准化的数据接口,以保证整个网络信息体系的有效畅通。同时对海量的异构数据(文本、图片、音频、视频)需要能够进行智能的分类,完成标签的定义、产生、分析等一系列的管理工作,最终实现数据的整合[7]。
1.4 网络通信层
网络通信层是系统的“连接枢纽”,利用各种通信手段进行数据传输,包括水面通信和水下通信两部分。水面通信方式主要有两种无线电通信和卫星通信。以4G、5G通信为代表的陆上无线电通信可以在带宽、传输距离等性能上满足海洋牧场的近岸区域通信需求,但是对于海上则无法得到保证。鉴于卫星通信覆盖面广的特点,对于离岸较远的海面上,常采用卫星通信作为陆上无线网络的有效补充[8]。我国已启动了全球移动宽带卫星互联网系统,今后无论是在荒漠、大洋、极地还是飞机上,均可通过卫星接入互联网服务[9]。
常见的水下通信方式包括水声通信、可见光通信、无线射频通信、有线光缆通信等。水下的环境与陆上环境有较大的不同,各种通信方式也存在着各自的利弊(见表1)。声通信应用广泛,被认为是最成熟的水下通信方式,其具有通信距离长、信号衰减小等优点,但受水下多普勒效应、多径效应的影响,传输速率低、误码率高,同时受海浪、船舶、暴雨等产生声音的影响,其信噪比也会增加,声波还会对海豚、鲸等海洋生物产生一定的干扰[10]。因此,一般长距离的控制信息的收发、近距离的小数据包的收发适合采用声通信。

表1 常见水下通信方式对比
可见光通信可提供Gb级高带宽,并且几乎不存在延迟,适合进行视频和图像数据的传输,但光波在海水中会产生散射效应和吸收效应,尤其浑浊度高的海水造成的散射更为严重,而且自然光的辐射也会使得光信号产生较高的信噪比,因此可见光通信适用于水下近距离的高带宽数据传输[11]。
有线光缆通信带宽高、抗干扰能力强,但使用范围受限,同时布设和运维成本高,一般仅在海底的数据骨干网中使用。
1.5 感知层
感知层位于系统的最末端,包括水文、气象、生物、生态等环境数据的感知,以及水下视频影像信息的采集等。随着电化学技术的发展,除pH值、溶解氧、温度、盐度一些常见的水质参数外,更多复杂的水质参数也可以通过传感器实时获取。被标记的海洋生物、水下巡查、生物采样、水产捕捞作业等也是感知层的一部分。多种方式的水下数据获取和水下作业实现了对水下环境的多方位感知和探测。
2 网络架构
由于海洋牧场具有水下、海上跨空间、跨介质的特点,所以UIoT框架下海洋牧场网络技术架构主要通过水下无线传感网(Underwater Wireless Sensor Networks,UWSN)结合海上MESH网络(Wireless Mesh Networks,WMN)优化构建。介于海洋的特殊环境,网络的优化目标是实现高生命周期、低能耗、高效率、高服务质量(Quality of Service,QoS)。
2.1 水下无线传感网
UWSN是由多个轻量级的网络传感节点形成的多跳的自组织网络,其轻量级主要体现在低功耗,计算简单。节点按照功能可分为两类:簇头节点和监测节点。簇头节点将数据发间接或直接将数据发送至水面的汇聚节点。水下的网络节点需要靠电池供电,更换维护电池的成本较高,因此提高水下网络的生命周期是尤为重要。提高网络生命周期的方式有多种:(1)优化水下多跳网络的路由,避免热点节点的产生,从而导致热点节点能量过快耗尽;(2)优化水声通信设备的发射功率。过高的发射功率虽然可以提高传输距离,但也可能会对其他网络节点产生干扰,因此设计优化发射功率的控制算法也是研究热点;(3)优化设备睡眠机制:对采集的历史数据进行分析,建立数据模型,预判数据趋势,可提高睡眠频次,减少数据采集频次。从而减少能耗[12]。
由于UWSN主要依靠的是声通信,不仅存在低带宽、高延迟的问题,还存在与海洋哺乳动物共享频谱的问题。这需要在保障通信质量的同时,避免声信号对海洋哺乳动物带来危害。网络节点配有被动探测装置,可对哺乳动物进行定位探测,当通信网中存在哺乳动物时,需要有效地进行发射功率控制,提高频带的利用率,避免对哺乳动物产生干扰和伤害。
UWSN的协议栈分为5层:应用层、传输层、网络层、数据链路层、物理层。其中与陆上的无线网络最大不同之处是数据链路层中的介质访问控制(Media Access Control,MAC)。显然,由于水下声通信的带宽、延迟等限制,无法直接采用电磁波为介质的MAC层协议。水声通信的传播速率一般在1 500 m/s左右,所以提高MAC层性能是重要的研究方向,性能的提高主要体现在降低资源开销,减少信道占用时间,提高网络数据的吞吐量,提高信道负载的适应能力,应对网络负载的变化,对应调整适合的传输模式。目前提出的水下MAC协议类型分为非竞争型、竞争型。非竞争MAC协议通过将时间间隙、频带、代码进行合理分配,一般通过码分多址(Code Division Multiple Access,CDMA)技术扩展码实现内部通信,并使用时分多址(Time Division Multiple Access,TDMA)技术实现通信调度,用频分多址(Frequency Division Multiple Access,FDMA)信道的高效利用;竞争性MAC协议是不同的节点根据实际通信需求来抢占信道,这种协议显然在少量节点时,可以进行高质量通信,但节点较多的网络时,容易产生堵塞和资源浪费[13-14]。
2.2 海面MESH网络
MESH网络具有较强的自组织性和灵活性,陆地上已有广泛的应用,海面上的MESH网络主要是由灯塔节点、母船、工程平台等设备构成。与UWSN不同的是,水面网络设施配置和性能更高,可通过太阳能等多手段供电,节点均具备多模式通信,除了与水下节点通过声、光、有缆通信外,水面节点之间直接通过无线电通信。各节点均装有GPS,可直接进行定位。MESH网络是Ad-hoc网络的特例,其扩展性强、可变拓扑、便于维护的特性非常适用于海上通信。可以不受节点的位置、数量变化的影响,自动建立连接,同时可以与空中卫星、岸基基站建立链路,接入INTERNET。
3 设备架构
典型智慧海洋牧场设备由水下、海面、空中、岸基等设备组成(见图1)。
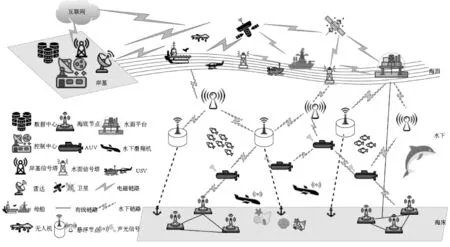
图1 系统设备构成
3.1 水下设备
在海床上固定的位置布设有传感节点阵列(见图1),搜集海底数据:包括水质数据、影像数据等。传感节点之间视距离和地形情况通过有线或无线方式进行连接,最终将数据汇总给簇头节点,数据由簇头节点传输到下一跳,由于海底设备的能源紧缺,充电和维护成本较高,因此水下节点的分簇以及簇头节点的选择、更替都有相应的研究。海底传感器阵列唯一与外界通信的节点就是簇头节点,簇头节点将数据发送给无人潜航器等机动设备或者直接传输给下一跳网络节点。对于浅海而言,在进行某一特定深度监测时,一般采取水下锚定结合浮漂悬浮的方式,锚点通过缆线连接到浮漂上,浮漂上配有传感器。由于水下海流的作用力,浮漂的位置会产生一定范围的偏移,因此,这种方式并不能做到精准水下坐标点的监测。为了减少漂移范围,可使用海面浮漂结合海底锚定的方式,一般只应用于浅海(见图2)。
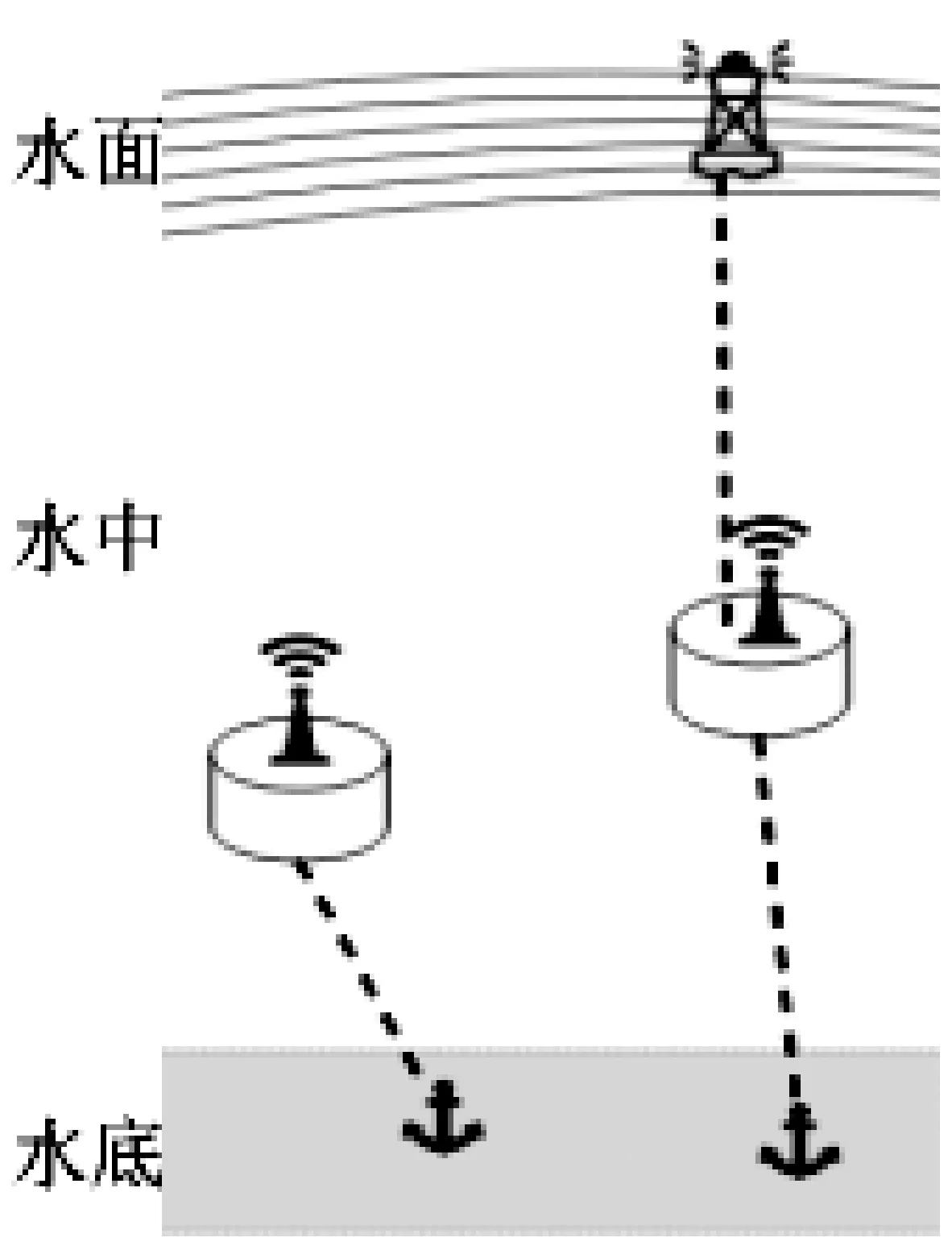
图2 节点的锚定
为了提高时效性、节约能耗,提升水下网络寿命,常采用AUV辅助的方式进行数据的采集。AUV具备多模通信手段,通过声通信进行控制信息和指令的收发,对数据采集的目标节点进行遍历,在遍历的过程中进行近距离的光通信完成数据的传输,而后返回水面汇聚节点交付数据。水下滑翔机也是水下数据采集的一种机动手段,其更多的是借助海流、利用净浮力和姿态角的调整获得推动力,具备能耗低、续航力强、维护成本低等优点。同样作为无人水下自动航行设备,AUV对比水下滑翔机,在功能全面性、运动的灵活性上更强,但其对应的各种成本也更高。在海洋牧场中,海底底波生长的海参、鲍鱼、扇贝等海产品的捕捞均通过人工潜水作业或大型机械翻底设备完成,人工潜水的方式会带来人身安全和身体健康的问题,机械翻底的方式会对底质的生态环境产生破坏。水下机器人(AUV的功能扩展)的出现,可以解决以上两个问题,目前水下机器人针对运动缓慢的海产品抓取,已经取得了一定实验进展,国家自然基金委、大连市政府、鹏程实验室自2017年起,每年都举办全国水下机器人大赛,各参赛队伍在目标识别、协同抓取、自主抓取方面都取得了一定的成绩,水下机器人取代人工采捕指日可待。
3.2 海面设备
海面包括母船、无人艇(Unmanned Surface Vessel,USV)、遥控无人潜水器(Remote Operated Vehicle,ROV)、工程平台、信号塔等(见图1)。由于陆上的无线电磁通信无法穿透水面,直接与水下设备通信,所以,海面设备主要起到了网络中继的作用以及作为水下数据传输的汇聚节点,向岸基控制中心进行存储转发。海面设备中的大型舰船、工程作业平台在能量、计算资源配备上更具优势,也可充当边缘计算的节点。USV、水面信号塔、ROV为相对轻量级的小型设备,USV可更机动灵活的完成水面巡逻、采样和水文数据的采集等任务。ROV采用人为遥控的方式,进行水面和水下任务的执行,包括设备的检查、探测、采样等需要通过人工干预的更精细的任务,也是其他航行器在功能上的补充。水面各设备节点之间均采用无线电通信,将搜集到的数据传送给岸基指挥中心。
3.3 空中设备
空中设备主要有无人驾驶飞机(Unmanned Aerial Vehicle,UAV)、卫星构成。UAV可通过摄像头进行海面的影像采集,并通过影像分析,进行鱼群识别、漂浮的藻类识别等,获取鱼类活动和海洋环境的有效信息。UAV可通过无线电通信将数据传送到水面节点,并可在母船上进行维护和续航。卫星设备也是空中设备的重要组成部分,如图3所示。高轨卫星和中低轨卫星,形成了卫星网络。高轨通信卫星轨道高度高、对地视场大,少量的高轨卫星即可实现全球覆盖。一颗高轨卫星即可组织起一个区域的网络,但其传输时延较高。低轨卫星不仅可以实现通信功能,还可以实现遥感影像拍摄和导航功能,由于其处于1 000~1 400 Km的低空,所以其传输时延也较低,相对较低的成本可以形成大规模的组网,保证了通信的可靠性,即使个别卫星出现故障不会对整个系统造成影响。卫星与岸基、水面、空中等网络节点直接通信,实现了地球表面网络的无死角覆盖。
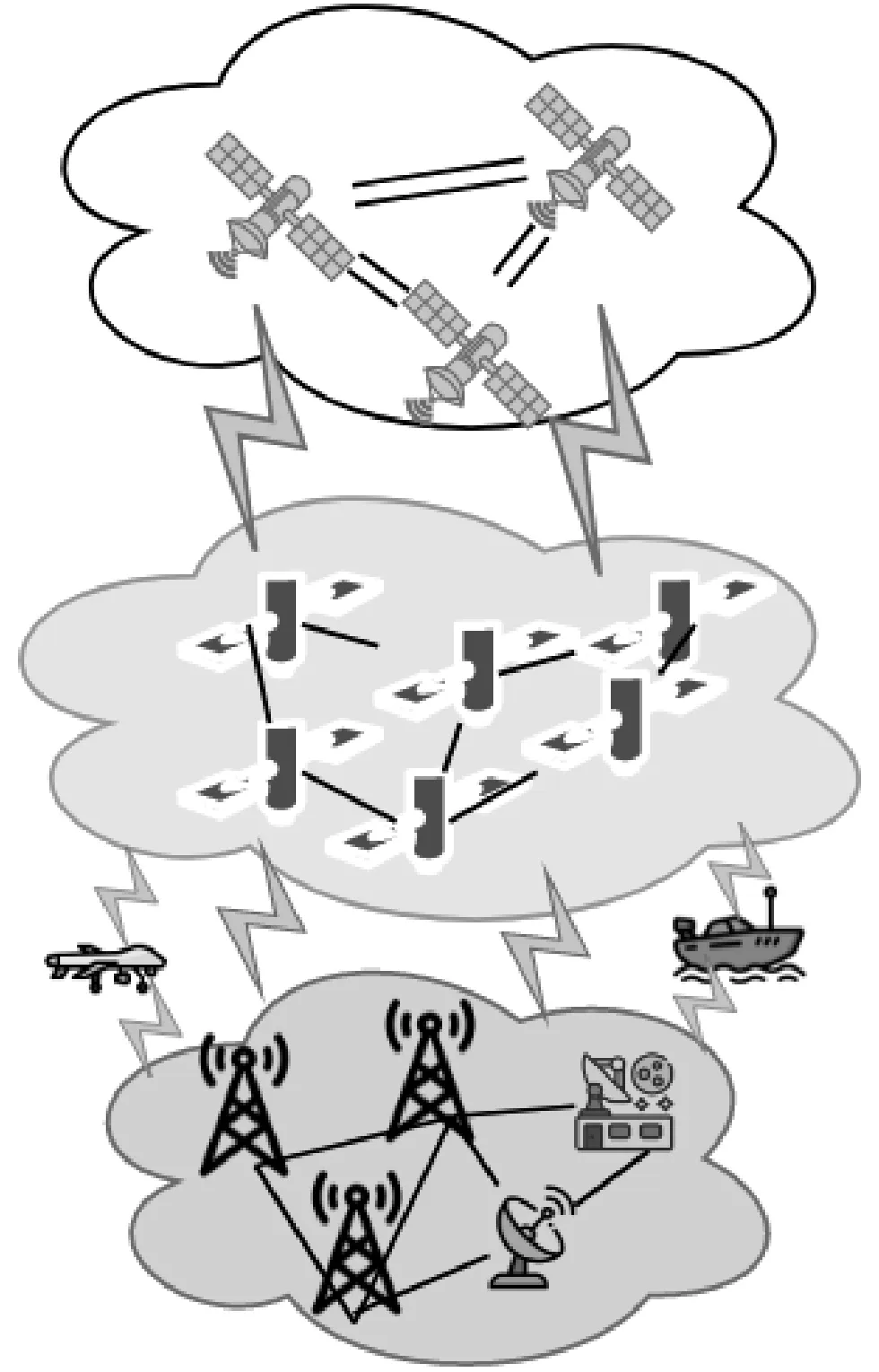
图3 卫星网络通信
3.4 岸基设备
岸基主要由雷达站、信号塔、指挥控制中心、数据中心构成。雷达负责海空目标的检测,信号塔进行无线电信号的收发。海上和空中的数据由信号塔接收传送到数据中心,控制中心可通过各类应用调取数据中心的数据进行前台的显示,管理人员进行数据的分析做出决策,可随时将控制信息通过信号塔发送给海面或空中节点,转发给目标设备。
4 结语
本文对基于水下物联网技术框架的智慧型海洋牧场的建设进行了讨论,提出了建设方案的技术框架,以及系统建设的设备构成和空间部署。随着水下通信网络研究的进步,实现天、地、海洋网络通信一体化、促进物联网的发展是第六代移动通信技术(6G)的重要目标。以水下物联网为核心技术的智慧型海洋牧场建设,是海洋牧场建设发展的必然趋势。海洋渔业是人类最早的开发和利用海洋的经济产业,水下物联网技术的发展必将会为海洋渔业的产业升级带来新机遇。
猜你喜欢
机械工业标准化与质量(2022年6期)2022-08-12
国际眼科杂志(2021年9期)2021-09-15
装备制造技术(2020年2期)2020-12-14
海峡姐妹(2020年6期)2020-07-25
儿童故事画报·智力大王(2015年12期)2016-01-23
中国卫生(2015年12期)2015-11-10
中国工程咨询(2013年1期)2013-02-13