
无人机载LiDAR测绘技术在矿山工程管理中的应用
2022-12-17 07:59蒋礼程
世界有色金属 2022年18期
蒋礼程
(广州建通测绘地理信息技术股份有限公司,广东 广州 511300)
近些年来,在我国矿山工程的实际建设过程中,工程测绘是十分重要的一项内容,可以为矿山工程项目开展提供有力依据。然而,矿山往往位于山区,地质环境复杂,植被茂密,人烟罕至,施工的前期测绘难度较大。矿区开采过程中的,施工区陡坎深坑遍布,工程施工车辆穿梭,测绘同样面临测绘难度大、危险系数高的问题。因此,跟传统测绘方式相比,无人机机载lidar技术很好的克服了这些问题,激光脉冲的多回波特性,可穿透植被到达被植被覆盖的地表,获取植被一下地形数据,经过激光点云的分类处理得到地面点数据生成高精度DEM数据,为矿区施工管理提供有力的数据支撑。与此同时,相比传统测绘方式,机载激光lidar数据采集高效,测量点位更为密集,且精准。
1 激光雷达测绘技术概述
1.1 激光雷达测绘技术概念
对于激光雷达而言,其主要是光频波段工作的雷达,可以通过光频波段的电磁波,将探测信号向目标地点进行发射,并对比发射信号与接收到的同波信号,从而对目标的高度、距离以及方位等位置进行明确,掌握具体的运动状态信息,以此来有效识别、探测以及跟踪目标。激光雷达的组成部分具体包括激光发射机、激光接收机、信息处理系统、伺服控制系统以及操控显示终端等[1]。
1.2 激光雷达测绘技术应用原理
和普通光波相比,激光要有着更好的方向性,其单色性也相对较强,具有良好的相干性程度,可以避免受到外界环境带来的影响,而且太阳光线对其作用也相对较小,这些特性可以拓展激光的应用范围。在矿山测绘工程中对激光测量进行应用,可以使距离测量的科学性以及准确性得到提高,并确保数据结果采集具有较高的可信度,而且还有着较强的抗干扰性能。在对激光雷达技术测量进行应用时,需要采用激光器向物体外表面发射激光,部分激光会发生反射,而激光雷达当中的接收器可以全部接受该部分回波,可以通过精密仪器准确测出接收时间长短,并对激光器在物体上的发射距离进行准确计算。通过将激光雷达测绘系统在工程测绘中进行应用,可以对激光器位置的坐标信息进行获取,并通过GPS技术对各个激光点的大地坐标进行计算,使众多的激光点能够汇聚形成激光点云,对点云图像加以构成。除此之外,激光雷达测绘系统可以对同一脉冲的多次反射进行记录,在树冠最顶部打上这些激光束,剩余激光束则会向下打在树叶或者枝干上,部分甚至打在地面上,然后被返回,从而有一组多次返回和分层排列的坐标点产生。相关测绘人员可以在工程测绘中广泛应用激光雷达测绘这一特点,例如可以分类处理和滤波处理这些获得的信息,对地面高程进行获取,对树木和建筑物的高度信息进行准确获取[2]。
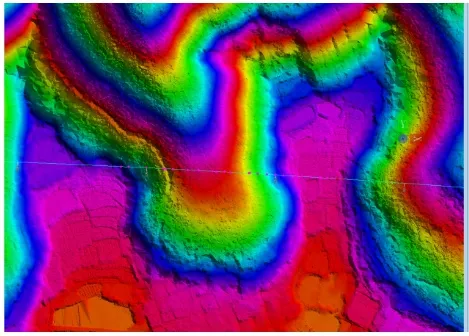
图1 点云分类后地面点模型
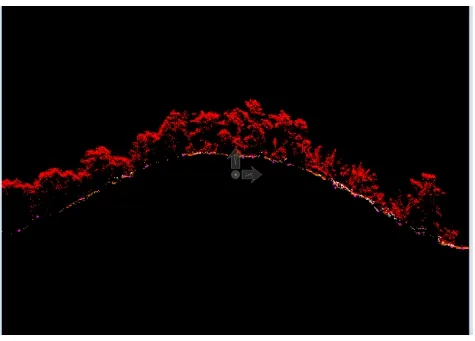
图2 点云分类后剖面图
2 激光雷达测绘技术在矿山工程测绘中的应用
针对数字矿山进行分析,其主要在矿山工程管理过程中应用数字化,可以合理开采和优化利用矿山资源,从而使矿山开采对环境造成的污染问题得到减少。结合当前情况进行分析,我国在资源开采过程中还存在相关问题,普遍存在过度开采以及浪费等现象,这也导致我国矿产资源出现严重短缺问题。为了使此现状得到改善,使资源浪费和污染问题得到减少,需要有效创建数字矿山。为了能够充分实现矿山工程的数字化管理,需要对激光雷达测绘技术进行有效应用。具体而言,通过对激光雷达测绘技术进行应用,可以准确测绘矿山地形地貌信息,对3D矿山模型加以构建,以此来为矿山规划提供科学合理的技术保障。除此之外,通过对3D矿山模型进行应用,可以在矿山突发性事故出现时,快速找到爆发点,使宝贵时间得到节省。而且还可以采取有效措施,使相关事故损失得到减少,有效控制矿山事故风险[3]。
以某地花岗岩采石场项目为例,我们按季度为该矿场进行激光点云数据采集,经过相邻两期数据比对,从而有效掌握矿场采挖进度,避免过渡开采,违规开采等,为矿产数字化管理提供精准的数据依据。
项目实施过程我们首先在已有资料的基础上对测区进行踏勘,踏勘已有控制点的可利用情况,并且进行参考面的布设和测量工作。根据测区地形地貌情况和项目要求设计航摄方案,使用无人机搭载机载LIDAR航摄仪进行航空摄影测量,获取测区的影像数据和激光点云数据,通过内业处理软件,对激光点云数据进行分类,基于分类点云数据及原始影像数据制作数字正射影像图(DOM)、数字高程模型(DEM)。
2.1 数据采集
本次项目采用的飞行平台为无人机激光雷达系统CW-30L为油动垂直起降固定翼无人机。CW-30L具备垂直起降,全自主起降、精准导航的功能,其最大载荷能力6kg,满载满油情况下,续航1小时,与此同时CW-30L的巡航飞行速度可达到100km/h,效率更高。
采用的设备为纵横公司的CW-30L无人机搭载RIEGL VUX-1LR激光雷达系统,飞机为垂直起降固定翼无人机。惯导系统为诺瓦泰KVH1750光纤惯导,该惯导采样频率为200Hz;激光扫描仪的型号为RIEGL VUX-1LR,最大脉冲频率为820kHz,扫描角度可自由调节,本次使用扫描角度为90°。
本次项目我们针对测区情况及技术要求,使用脉冲频率为600KHz,飞行高度为200m,设计点密度为17点/m²。
2.2 激光点云分类
在数据获取后,首先需要对点云数据进行预处理。点云数据预处理是由原始激光数据经过解算,对其平面和高程进行校正,得到精度符合要求的初步点云成果。主要包含POS数据处理、激光雷达数据预处理。
POS数据处理准备所需数据:基站数据(Base.txt)、移动站数据(GNSS.txt)、惯导数据(IMU.txt)、中继站数据(CORS.dat)。
POS数据处理:在IE中新建工程,分别将已转换后基站数据、移动站数据、惯导数据添加进工程,并填写好基站坐标。使用TC紧耦合解算方式,设备数据文件里自带惯导类型、设备杆臂值、旋转角,可直接进行组合解算。
激光雷达数据预处理,通过JoLiDAR预处理软件将获取到的三维激光点云原始数据与经过后差分解算后的POS数据进行融合处理,将其处理成通用las格式的点云数据,同时在该软件中可进行坐标转换,可将输出数据转成所需的目标坐标系,以便进行后续的数据进一步处理和数据分析。
点云数据经过对平面和高程进行校正后,通过自动处理及人工交互处理方式进行精细分类,分别提取地面点和非地面点的步骤。具体如以下几个步骤
(1)数据分块
读取不同航带的机载激光雷达点云数据,按成图比例尺等技术要求对点云数据进行分块,一般可以按照矩形分块,每一个分块为一个数据处理单元。
(2)噪声点滤除
噪声点主要包括明显低于地面的点(极低点)或点群、明显高于地物的点(极高点)或点群,以及其他在一定空间范围内分布异常的点或点群。
为减少噪声点对后期数据处理的影响,应利用自动算法或人工编辑方法将噪声点从点云中滤除。对于极低点或点群、极高点或点群,可在大范围内进行集中滤除。对于其他分布异常的点或点群,在噪声点滤除过程中应重点与植被点进行区分。
(3)航带重叠区处理
为减少航带重叠区冗余数据对后期数据处理的影响,参照航迹文件,宜滤除航带重叠区的冗余数据。
(4)分类编辑
通过宏命令,结合地形地貌设置好合适的参数后,不断地建立地表三角模型来分类地面点与非地面点。用已经选择好的最低点作为初始地面点构建TIN模型。在这个初始地面模型中,大部分的点都是在地面以下的,只有其中相对较高的一些点可能能接触到初始地面。然后通过不停地迭代加入新激光点来抬高扩建地面模型,不断加入的新点使得模型逐渐趋近地表一些,最终得到一个近似地面模型,从而实现地面点与非地面点的分离。
(5)人工编辑检查
人工编辑检查是对宏命令运行后的地面点、非地面点进行检查。分类宏的分类效果受地形的起伏、地形的复杂程度、植被的密疏情况、宏参数的设置等因素影响,造成某些区域的分类效果较差,对这些区域,需要重新设置宏参数过滤或者手工编辑,将分类错误的点归入正确的层。经过编辑检查后,才是分类后的成果分类点云。
2.3 数字正射影像 (DOM)制作
将原始航片通过外方位元素投影至分类点云制作的高精度DEM上进行逐个像元的微分纠正和投影差改正后,再进行匀色、镶嵌编辑,即可形成数字正射影像图。
(1)导出各像片的外方位元素
利用航摄数据预处理阶段解算的航迹文件,导出各张像片的初始外方位元素X、Y、Z、Omega、Phi、Kappa。
(2)空中三角测量
本项目采用带高精度惯导系统的航摄仪进行作业,可精准记录各像片的外方位元素,可实现无像控参与下空中三角测量。将影像初始外方位元素导入专业空中三角测量软件,空中三角测量计算结束后,利用平面精度验证点检核DOM成果,判断其精度是否满足要求。
(3)影像匀色
对影像进行色彩、曝光度和饱和度等的调整和匀色处理。匀色处理应缩小影像间的色调差异,使色调均匀、地物层次分明、避免较大反差,避免地物色彩失真。对影像模糊、拉花、错位、扭曲、变形等问题及现象,查找原因并进行处理。
(4)镶嵌
使用影像处理软件对影像进行拼接,修改镶嵌线。使镶嵌线拼接线不通过建筑物、桥梁等。须在图象重叠处仔细挑选,以使色调变化和看得见拼接线减到最少,镶嵌线的编辑要注意细节。
编辑过程尽可能遵循如下原则:
镶嵌线尽可能顺着线状地物走,镶嵌线的两侧难免会有色差等情况,线状地物便于后期影像处理软件的处理。
为保证重要地物的完整性,尽可能绕开像高压线塔、通信塔等重要地物。
镶嵌线的选择,需尽量绕过建筑和山地,保留更多地面信息。
为获得较好的效果,镶嵌线尽量走直线,或平滑的曲线,避免取小角度折线。
2.4 数字高程模型(DEM)制作
基于不规则三角网原理,利用前面点云分类后得到的地面点数据,将地面点通过不规则三角网或格网等构建DEM。主要步骤如下。
(1)数据预处理
将航线和点云数据导入TerraSolid软件,裁剪航线,点云分块。
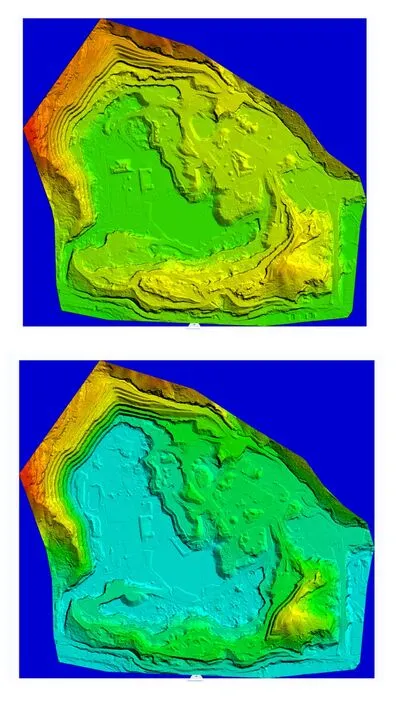
图3 前后两期DEM对比
(2)地面模型关键点提取
利用精分类后的地面点来提取航带间重叠的模型关键点,通过对关键点构建不规则三角网,并对其进行内插处理后,再实现格网对栅格数据的转变,从而得到地面数字高程模型(DEM)。由于DEM是按照比例尺要求进行分幅的规格进行处理并生成的,因此必须对接边的区域进行检查必要时进行相应的编辑。将相邻图幅的DEM通过卷帘的方法检查,检查地面要素是否正确接边,如图幅间接边精度不符合要求,应该检查手工分类过程中是否存在点云分类错误的情况,并进行相应的修改。修改调整后再重新生成DEM并检查接边,以此反复调整,直到达到DEM接边精度要求为止。
2.5 数据成果分析
本次项目实施过程中,我们在质量控制方面严格把控,实行各级责任制。
加强测绘产品的质量控制,实行二级检查一级验收制度。作业完成后,作业人员对完成的成果资料进行了严格的自检和互检,对出手的资料质量负责。根据作业组上交的成果成图资料,项目部对成果进行过程检查。对测量资料进行100%的室内检查。
本项目完成过程检查后,负责质量控制的成员对全部成果进行最终检查。对所有相关成图资料进行100%的内业审查,完成检查后,对成果资料质量情况做最终评定。对不符合技术要求的测绘成果,各级质检人员根据所存在的问题的性质和对质量影响的大小及时反馈并提出整改意见。
经过机载激光点云数据内业处理及层层质量检查后的成果,结合两期高精度DEM数据融合对比,得到精准的矿产开采量,叠加数字线划图得到地质图成果。经过与测区测设的控制点进行比对,平面中误差小于0.3m,高程中误差小于0.1m。满足项目精度要求。

图4 地形地质图
与此同时,成果数据与设计红线叠加,并结合成果剖面数据进行数据分析,可以准确反应矿产开采情况,可根据剖面图可直观的掌握矿产开采情况以及判断是否依照设计进行规范开采。本次项目结果显示,矿产开挖依照设计进行开采,未发现超越设计红线的情况。
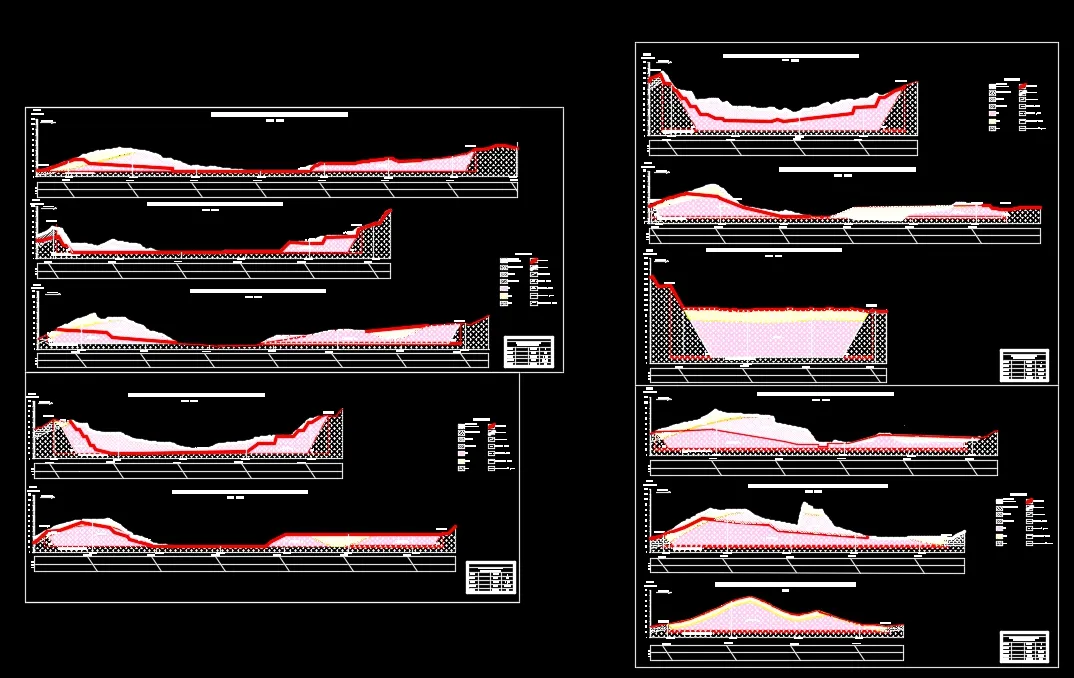
图5 剖面图
同时对成果数据进行资源量分析,矿产资源量的估算及分布得到更为精准直观的呈现,从而更为准确的掌握资源量分布情况。

图6 资源量分布平面图
3 结束语
综上所述,通过将激光雷达测绘技术在矿山工程测绘中进行应用,一方面可以使测绘工作质量和效率得到提高,另一方面还可以弥补传统测绘技术应用中的不足,促进我国工程测绘的快速发展。对此,在矿山工程测绘过程中,相关测绘人员需要对激光雷达测绘技术进行有效应用,明确该项技术的应用原理、分类,掌握关键技术,从而使测绘工作的精准度与效率得到提高,推动我国测绘行业的健康发展。
猜你喜欢
房地产导刊(2022年10期)2022-10-18
农业工程学报(2022年4期)2022-04-24
建材发展导向(2021年22期)2022-01-18
资源信息与工程(2021年5期)2022-01-15
汽车观察(2021年8期)2021-09-01
神剑(2021年3期)2021-08-14
昆钢科技(2021年2期)2021-07-22
当代工人·精品C(2020年1期)2020-05-20
阳光(2020年5期)2020-05-06
铁道通信信号(2020年10期)2020-02-07
