复杂建筑空间人员应急疏散的无人机引导模型研究*
2022-12-14 03:35汪京辉房志明
中国安全生产科学技术 2022年11期
吕 伟,师 远,汪京辉,房志明
(1.武汉理工大学 安全科学与应急管理学院,湖北 武汉 430070;2.武汉理工大学 中国应急管理研究中心,湖北 武汉 430070;3.上海理工大学 管理学院,上海 200093)
0 引言
随着我国城市化建设水平的不断提高,城市中大型化、复合化建筑综合体数量逐渐增加,此类建筑内部人员具有密集度高、熟悉度低等特征,一旦遭遇火灾爆炸等突发事件,人群慌乱失序容易导致应急疏散不及时、不合理和不高效,甚至造成人员伤亡。因此,紧急情况下复杂建筑空间中的应急疏散引导十分重要,如何科学、高效进行应急疏散引导,是亟需解决的问题。
针对应急疏散引导有效性和科学性,国内外学者主要探讨2类问题:一类是疏散引导效率可行性问题,通过对比火灾情况[1]、大型购物中心[2]、地下商业综合体[3]、地铁车站[4]、陌生环境[5]等多种场景中有无疏散引导时的疏散效率,得出有疏散引导的方案可实现更短的疏散时间和更均衡的出口利用,有效提升整体疏散效率;另一类是疏散引导人员设置问题,通过对引导人员数量、速度、位置等因素进行研究,发现引导员在一定程度上可以提高疏散效率,但并非越多越好,当引导员速度为行人速度的75%时,可能获得较高的疏散效率[6],并且通过引导员静态布局优化,能够确定布设引导员的最佳位置和最大数量[7],综合考虑出口通行能力和最短路径设置引导员,也可获得较高的疏散效率[8]。
在应急疏散引导途径和方式方面,除布设疏散引导员,先进的技术和系统也被尝试引入以辅助引导应急疏散。目前,主要技术有定向扬声器声音诱导[9]、机器人动态引导[10]、WiFi室内移动应用引导[11]、声学引导[12-13]、LED灯珠光学引导[14]、BIM+VR三维动态引导[15]和激光引导[16]等,为复杂建筑场景中人员疏散提供更加安全可靠的引导途径,但大部分技术尚处于实验室研究及优化阶段,需要进一步向实际工程应用迈进。
综上,在复杂建筑空间的人群应急疏散中采用引导策略和方法,是提升疏散效率、保障人员生命安全的重要途径,而先进技术和系统装备又是实现这种疏散引导的重要方式。考虑到无人机是1种可携带声、光及生命探测模块的自主运动智能体,可以在不确定的对象和环境条件下执行高危险任务,故利用无人机取代引导员,在复杂建筑空间中用于疏散引导被困人员疏散逃生,具有高性价比、高可行性。但由于疏散引导无人机集成复杂度高、待解决的问题繁多,目前尚无可实际应用的疏散引导无人机,此外,利用无人机进行疏散引导的研究也相对较少。
因此,本文将从理论方法层面,通过依次解决无人机全覆盖遍历建筑空间的飞行路径规划、无人机引导疏散人员寻找出口的最优路径规划、多无人机协同搜索的任务分配3个子问题,围绕无人机引导疏散的可行性和效率提升,提出1套可适用于复杂建筑空间人员应急疏散的无人机引导模型,以期为无人机实际应用于复杂建筑空间中人员应急疏散提供理论支撑。
1 复杂建筑空间中无人机空间遍历
无人机在复杂建筑环境中的空间遍历是实现被困人员搜寻的关键途径和疏散引导的重要前提,这种空间遍历要求无人机既能够对建筑空间实施全覆盖,又能够使其在遍历路径中重复折返次数尽可能少。为达到上述要求,采用无人机移动规则寻优方法,首先确定无人机在建筑环境中的移动规则,如图1(a)所示,对于当前状态下的无人机,其移动方向的可能性用8邻域元胞表示,分别用字母a~h表示,如果某元胞被障碍物占据或已经被无人机遍历,则该元胞对应移动方向删除,对于未被删除的移动方向,无人机遵循一定优先级规则进行移动。对于8邻域移动可能,无人机优先级规则数量为8领域的全排列,即8!种(40 320种),例如a>b>c>d>e>f>g>h表示其中1种移动优先级规则。为确定较优的移动优先级规则,随机生成如图1(b)~图1(d)所示3张测试地图,借助计算机程序对每张地图进行8!种移动优先级下的无人机遍历测试,记录每种优先级下无人机重复折返次数,即每一空间元胞被重复遍历次数之和,列出每张测试地图对应无人机重复折返次数最少的前2种结果,如表1所示。
选择表1中3张地图总折返次数较少的作为本文无人机空间遍历移动规则:a>b>c>h>f>g>d>e,即“左上>上>右上>左>下>左下>右>右下”,如图2(a)所示,运用此移动规则实现1个随机建筑环境中无人机空间遍历路径规划,如图2(b)所示。由图2可知,该路径重复遍历元胞次数为3次。
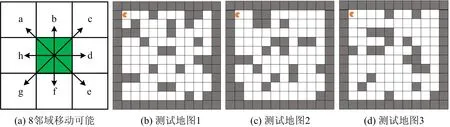
图1 无人机空间遍历移动规则寻优测试地图Fig.1 Test map for optimization of UAV space traversal movement rules
无人机在进行空间遍历移动时,当周边邻域全部被障碍物占据或已经被遍历时,根据移动规则,将无法继续行进,即无人机进入空间遍历“盲区”,如图3(a)所示。为解决这一问题,制定并采用“盲区策略”:一旦进入空间遍历“盲区”,无人机将返回距离最近的上一个多选择点,在该点该变方向继续空间遍历,在返回上一个多选择点时,可穿越已经遍历过的区域。考虑到无人机从“盲区”到其最近的上一个多选择点之间的路径有多种可能,采用广度优先算法找到最短路径,返回后继续重新遍历。该策略过程如图3所示,图中×和O分别表示实体障碍物和已经遍历的区域。
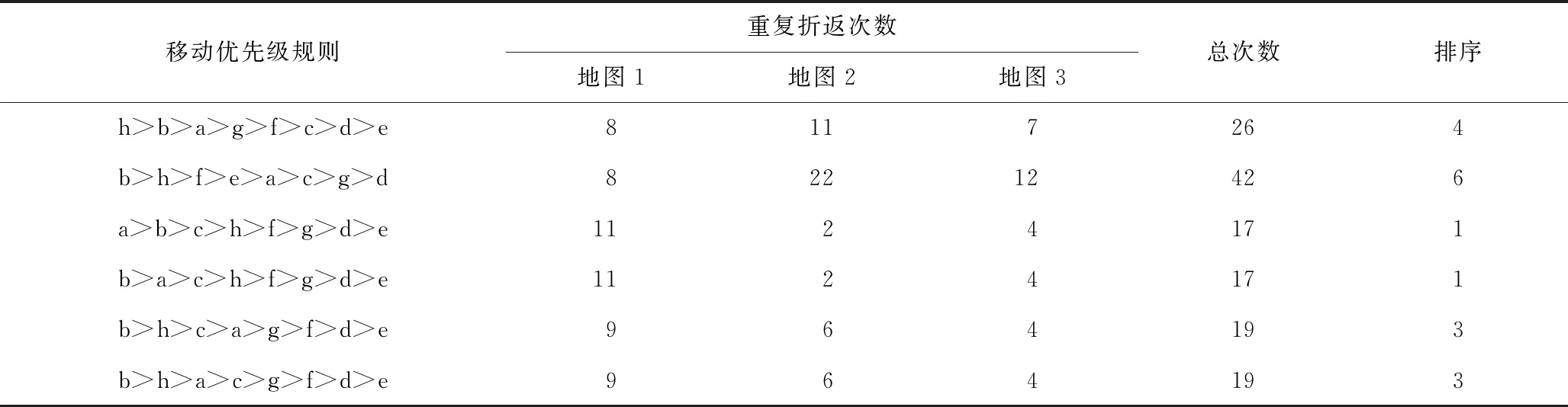
表1 无人机空间遍历移动规则寻优测试结果Table 1 Test results for optimization of UAV space traversal movement rules
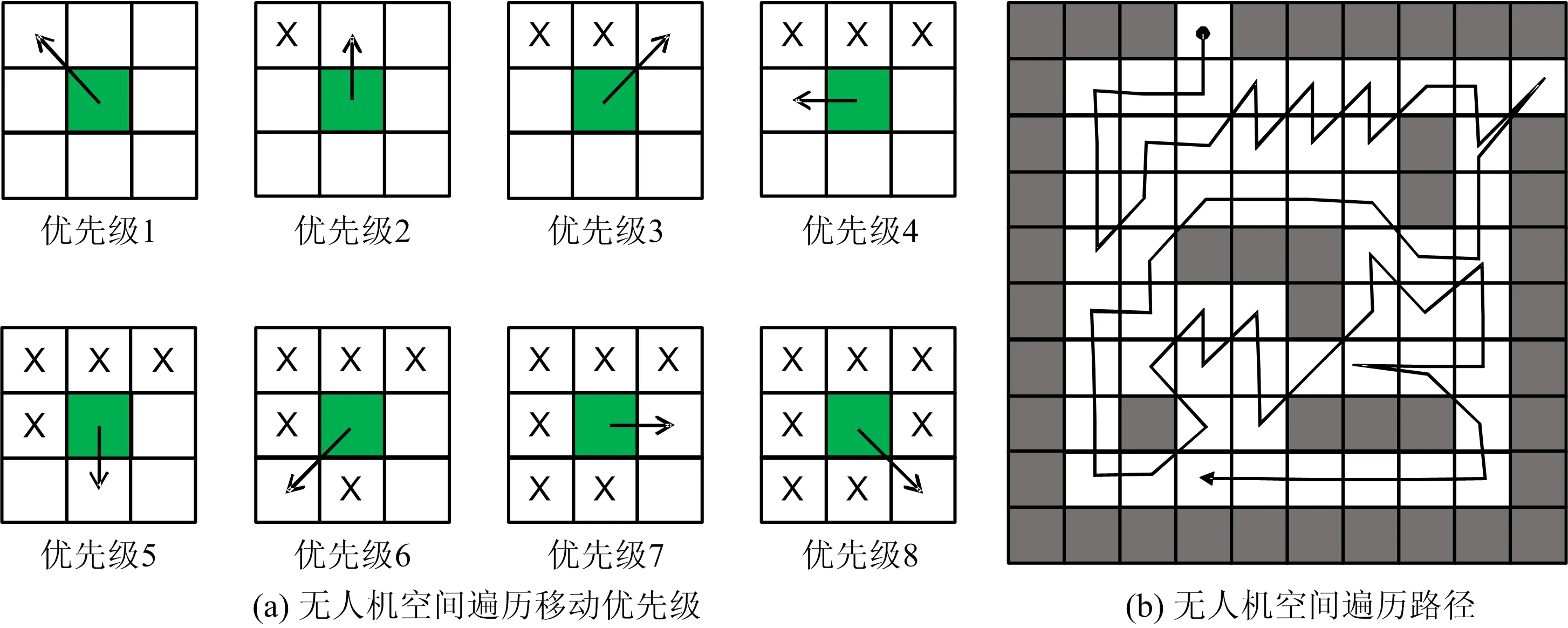
图2 无人机空间遍历移动规则及空间遍历路径规划Fig.2 UAV space traversal movement rules and space traversal path planning
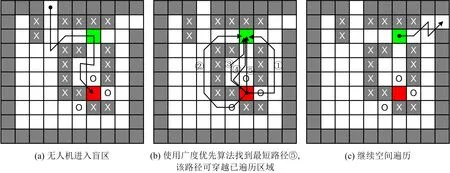
图3 无人机空间遍历“盲区”策略示意Fig.3 Schematic diagram for “blind area” strategy of UAV space traversal
2 复杂建筑空间中无人机引导疏散路径规划
当无人机在遍历过程中发现被困人员时,需要立即引导被困人员尽快撤离并抵达安全出口。对于路径寻优问题,不仅要考虑路径的快捷性,更要考虑路径的安全性,特别是当建筑中存在烟、火、毒等灾害因素时,最快捷的路径可能会因不安全而被舍弃。在路径规划问题中,快捷和安全相当于2个优化目标,快捷性可由路径长度表征,安全性则可由威胁疏散的灾害因素表征,为便于问题求解,将二者进行统一。为此,本文提出“当量长度”概念,表征被困人员到达安全出口的难易程度,核心思想则是将影响疏散路径的灾害因素转化为其作用路径长度的权重,将安全维度转化为长度维度。
令疏散路径上第i个路径节点元胞在受到第j种灾害影响因素时的路径长度权重系数为Kij,如式(1)所示:
Kij=Ti_R/Tij_R
(1)
式中:Ti_R表示正常情况下疏散者穿过第i个路径节点元胞所需时间,s;Tij_R表示第i个路径节点元胞在第j种灾害因素影响下,疏散者穿过该节点元胞所需时间,s。由于受灾害因素影响时,人员需更快离开受灾害因素影响的元胞,故Ti_R>Tij_R,Kij>1。
令疏散路径OD的“当量长度”为LOD,计算如式(2)所示:
(2)
式中:δi为受灾影响判定量,若第i个路径节点元胞受到灾害因素影响,则δi=1;li表示第i个路径节点元胞的实际长度,为1个标准长度单位1;n为路径OD上的元胞总数量;i=1,2,…,n,为路径起点元胞致终点元胞的顺序编号;j=1,2,…,m,表示对应的m种灾害影响因素编号。
灾害因素影响下的疏散路径“当量长度”示例如图4所示。图4中显示由同一起点至同一终点间的3条路径r1,r2,r3,其中,路径r1,r3分别途径8,4个元胞,且这2条路径并未受其他因素影响,则路径r1,r3的路径长度和“当量长度”相同,分别为8,4;而对于路径r2,虽然其路径长度为4,但由于途径的第2个元胞是火灾烟区,受烟气温度和烟气毒性2种因素影响,这2种因素的路径长度系数分别为K21=1.8,K22=3,根据“当量长度”定义,路径r2的“当量长度”为6。因此,最佳疏散路径为r3。
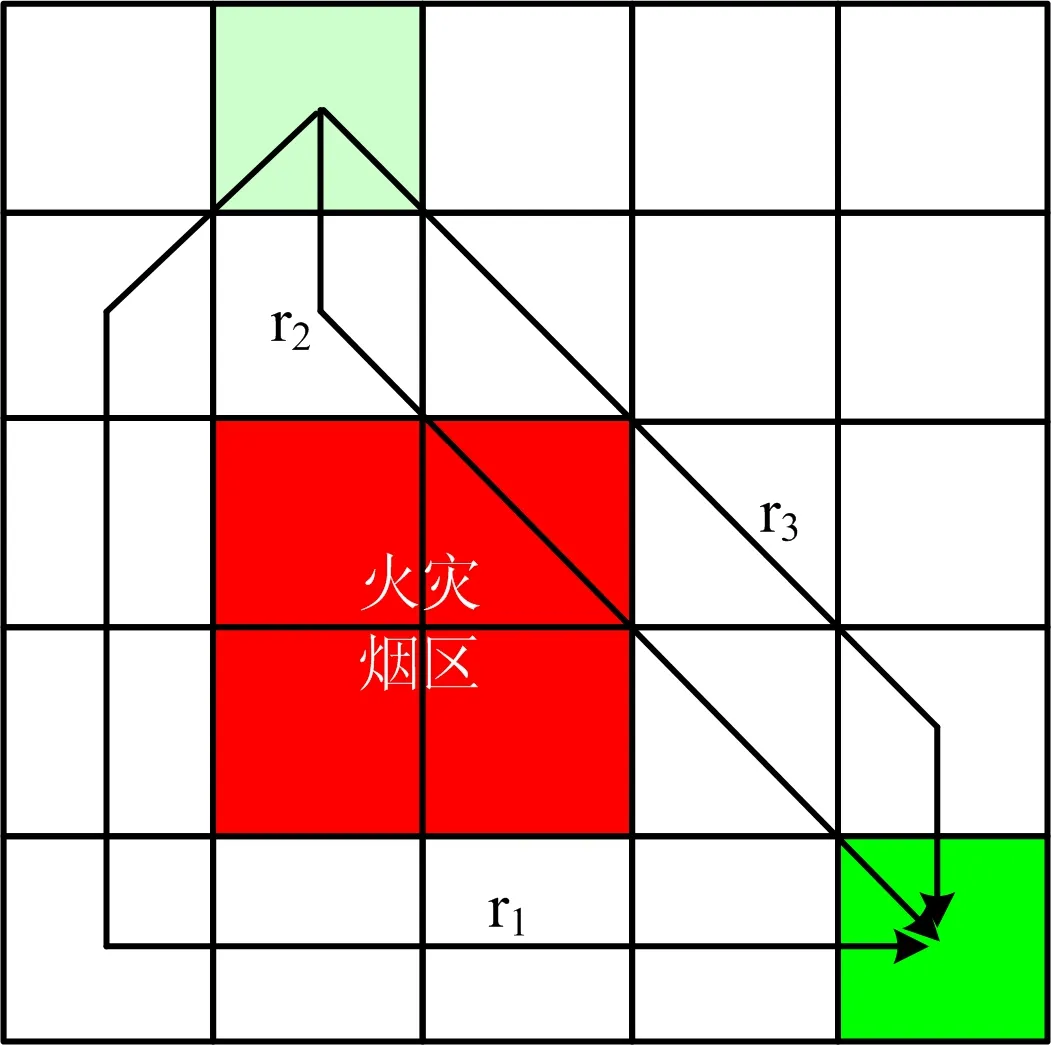
图4 灾害因素影响下的疏散路径“当量长度”示例Fig.4 Example of evacuation path “equivalent length” under influence of disaster factors
针对引导被困人员找寻出口的最优路径规划问题,本文选择引入基于遗传-蚁群算法设计最优路线。运用遗传算法的快速全局搜索能力,对蚁群算法初期所需信息素进行快速处理,利用蚁群算法的正反馈机制,快速找出可行路径,缩短搜索时间。具体包括以下6个步骤:
1)将建筑空间平面离散化为元胞节点,并将元胞编码为k(k=1,2,…,M,M为空间划分元胞总量),设元胞k自身路径“当量长度”为Lk。
2)设火灾初始位置为w,每个地点初始信息素数值为0。根据遗传算法求解最优种群,根据适应度函数生成初始种群,对得到的种群进行选择、复制、交叉、变异操作,生成下一代种群,重复此操作,得到最优种群,作为蚁群算法的初始种群信息素。
3)设Ant(x,k)为蚂蚁x在元胞k上,蚂蚁的信息素浓度为τ,蚂蚁在移动中根据各地点的启发式信息和“当量长度”信息决定移动方向,计算蚂蚁x从元胞k移动到元胞k′的概率Px(k,k′),如式(3)所示:
(3)
式中:Psum(k)为所有经过元胞k的蚂蚁所留下的信息素总值;η(k,k′)为启发函数,可结合式(2)得出η(k,k′)=1/Lkk′;α为信息启发算子;β为期望启发因子。
4)采用Ant-Cycle模型更新信息素,如式(4)~(5)所示:
(4)
τi′=τi′+Δτii′
(5)
式中:Q为蚂蚁行走单位长度所释放的信息素强度,为设定好的固定常量;蚂蚁行走过程中,在行走距离上均匀释放信息素,当蚂蚁从元胞i行走到i′时,元胞i′的信息素浓度增加1个Δτ,Δτ与元胞i和i′间的“当量长度”Lii′成反比。
5)每次搜索后,路径上的信息素会进行整体更新,下一波蚂蚁经过时,会按照信息素浓度较高的规则选择路径较短的路口而放弃长路径,循环往复,“当量长度”越短的路径信息素浓度越高,蚂蚁在正反馈机制作用下找到最优路径。
6)当搜寻次数为N时,结束搜寻路径,输出此时保存的最优路径信息,算法结束。
为验证遗传-蚁群算法在火灾时期路径规划的可行性,建立 20×20的元胞空间表示建筑环境,其中灰色表示障碍物,橙色表示受火灾影响,以颜色深浅划分4个等级,即火灾的不同严重程度,其对应路径长度权重系数分别设定为2,3,4,5,数值越大表示火灾越严重,越不适宜穿越。设定蚁群算法参数为蚁群数量N=50,信息启发算子α=1,期望启发因子β=5;遗传算法参数为初始种群G=50,最大迭代次数Gmax=80,交叉概率pc=0.7,变异概率pm=0.08。运用Phpstorm编译程序将所基于遗传-蚁群算法的无人机引导疏散与被困人员自行逃离路径进行仿真计算并比较,如图5所示,黑色线路为算法给出的无人机引导疏散路径,蓝色曲线表示人员自行疏散路径。由图5可知,本文构建算法可实现最大限度的灾害规避,同时疏散路径“当量长度”也远小于自行逃离情况,路径规划效果良好。
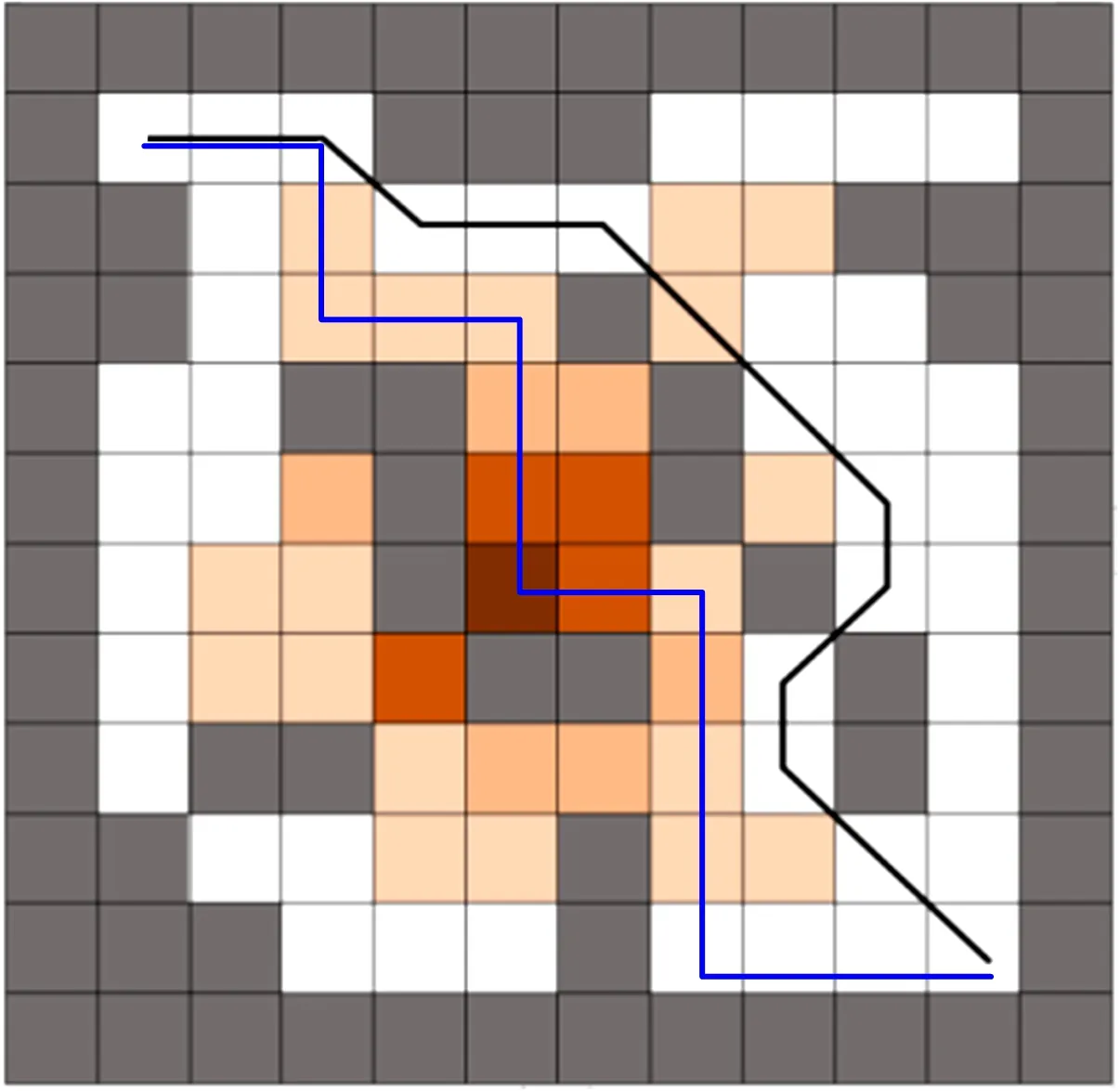
图5 基于遗传-蚁群算法的无人机引导疏散路径规划Fig.5 UAV-guided evacuation path planning based on genetic and ant colony algorithm
3 复杂建筑空间中多无人机协同搜索引导任务分配
对于大尺度的建筑空间,单无人机完成整个空间遍历会很耗时,容易贻误搜索和引导被困人员疏散的最佳时机,考虑到单无人机往往无法独立完成大尺度空间的遍历和引导任务,为提高应急救援效率,可以考虑多无人机协同工作,由多个无人机分别在建筑空间的不同区域同时进行各区域内的空间遍历和疏散引导。
实现多无人机协同搜索引导的核心问题是对建筑空间进行合理地区域划分,进而根据区域数量确定协同无人机数量。由于现实建筑平面空间多由障碍物和空区域共同构成,而多个障碍物的存在必然会增加单个无人机空间遍历的复杂度和转弯折返次数,因此,本文提出基于“障碍物空间场域”的建筑空间区域划分方法,具体包括以下3个步骤:
1)将建筑空间平面离散化为元胞节点,定义2类元胞即障碍物元胞Ci,j和空区域元胞Ck,其中,i表示障碍物编码,j表示障碍物中元胞编码,如图6所示。
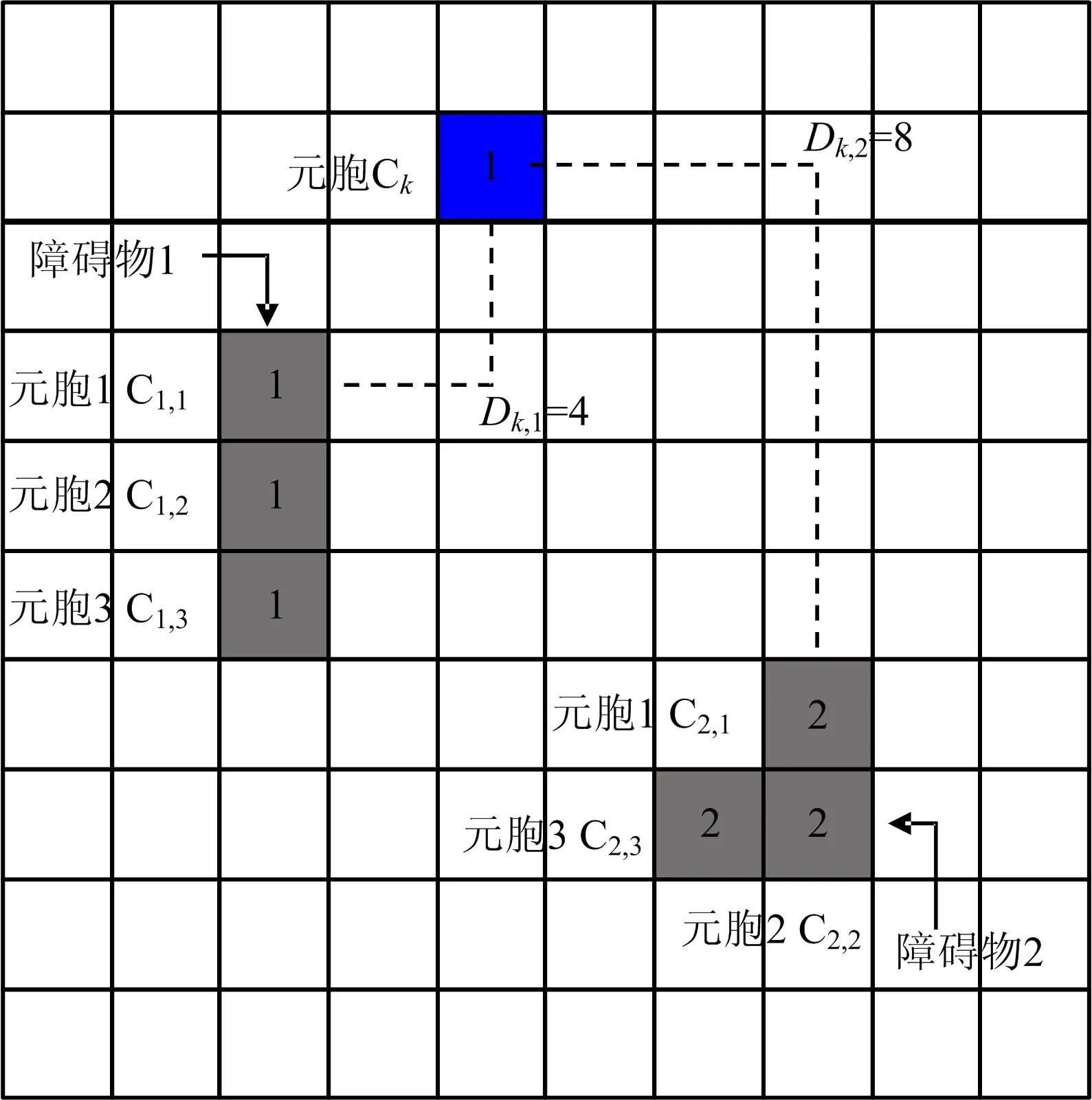
图6 建筑空间元胞归属区域划分示意Fig.6 Schematic diagram for attributed region division of building space cells
2)计算任意空元胞Ck与各障碍物之间的曼哈顿距离Dk,i,如式(6)所示:
(6)
3)比较空元胞Ck与各障碍物之间曼哈顿距离Dk,i的最小值,判定空元胞Ck属于最小值对应的“障碍物空间场域”,并用对应障碍物编码i表示场域值Vk,如式(7)所示:
(7)
根据步骤1)~步骤3),对建筑空间中的空区域元胞进行划分,结果如图7(a)所示,建筑平面空间中有3个障碍物,该平面空间对应地被划分成“障碍物空间场域”值为1,2,3的3个分区,任一分区中的任意空元胞在物理距离上只与该分区内的障碍物最近,无人机将能够以分区内障碍物为参照系进行辐射式空间遍历,对空间的参照记忆量和逻辑操作量也会有效降低。基于图7(a)空间分区,可以在各分区中至少布置1架无人机进行协同空间遍历搜索,如图7(b)所示。在遍历过程中,任一无人机一旦发现被困人员,则暂停当前遍历,规划最优路径并引导人员完成疏散,再返回自己所在分区的遍历暂停点继续遍历剩余空间,直至搜索并引导所有被困人员完成疏散。
4 复杂建筑空间中人员疏散的无人机引导仿真实验
集成上述3种方法,对发生火灾后多无人机搜救火场被困人员的场景进行仿真实验研究。为检验本文构建无人机引导模型的有效性,分别开展没有无人机引导疏散场景、单无人机引导疏散场景和多无人机协同引导疏散场景的仿真实验对比分析。对于没有无人机场景,被困人员需自行寻找出口,移动规则为先找到最近的墙壁或障碍物,然后沿墙壁或障碍物移动寻找出口,若移动遍历完某一墙壁或障碍物,则再移动至另一较近的墙壁或障碍物,依此类推,直至找到出口;对于有无人机场景,无人机先通过遍历算法寻找其负责区域的被困人员,在找到被困人员后,基于遗传-蚁群算法的路径规划算法,引导被困人员从最优路径抵达出口。构建20×20的网格仿真实验空间并开展仿真实验,如图8所示,图中灰色格子代表障碍物,★代表被困人员所在位置,不同深浅的橙色表示火灾影响区域,其覆盖的格子颜色越深,危险程度越大,路径长度权重系数分别为2,3,4,5,其他颜色表示各无人机的任务区域,折线为仿真实验得到的无人机路径。
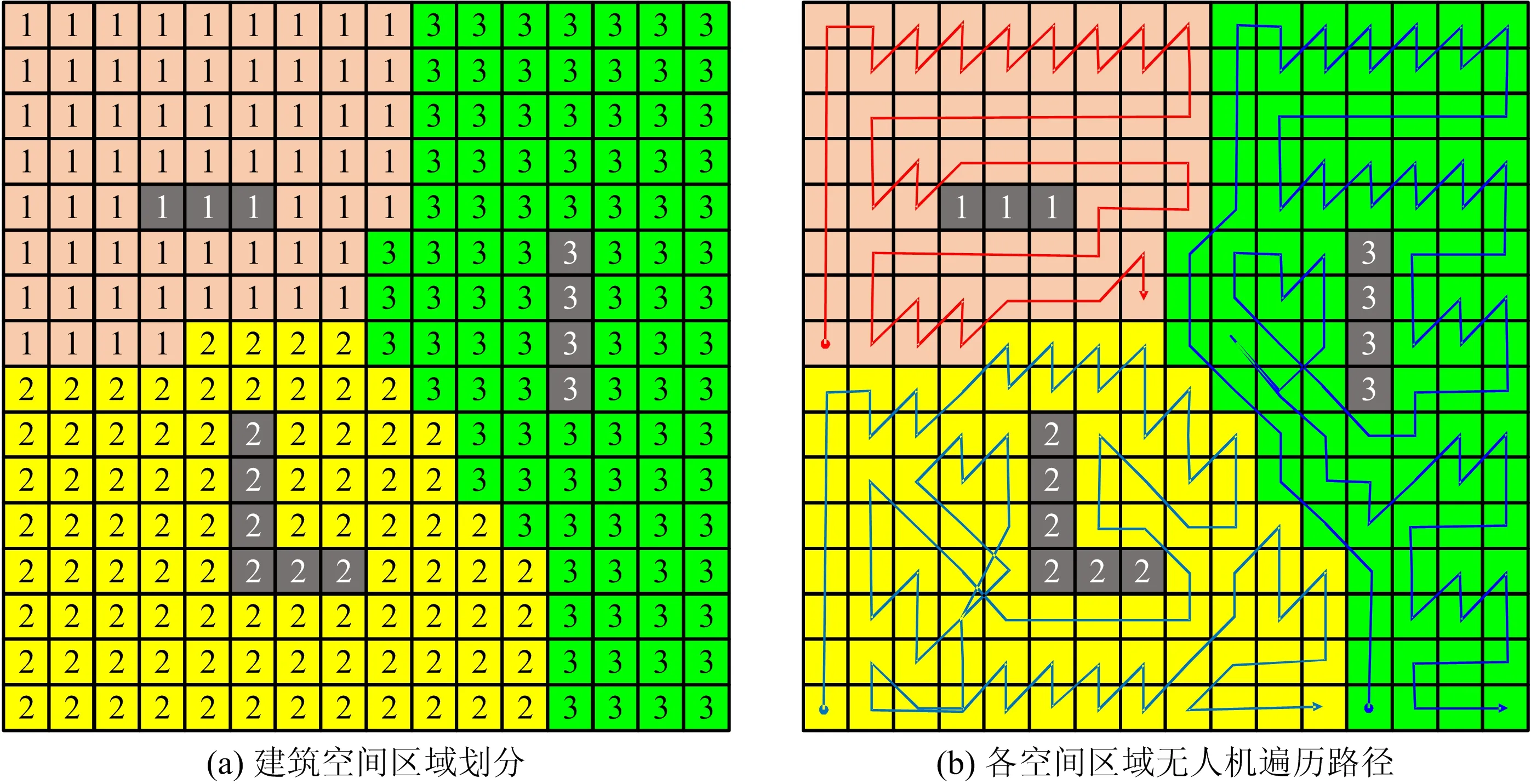
图7 多无人机协同引导疏散的空间划分与路径规划Fig.7 Spatial division and path planning of multi-UAV collaboration guiding evacuation

图8 无人机搜救火场被困人员仿真实验结果Fig.8 Simulation experiment results for UAV searching and rescuing of fire trapped personnel
表2给出3种仿真实验场景计算结果的对比数据,在相同环境下人员自行逃离,由于信息素不足,人员在搜索时容易陷入盲目期,人员容易陷入火场,增加被困人员的危险系数,降低疏散效率;单无人机场景中,无人机运用遗传-蚁群算法可以保持寻优路径高效求解运算,在考虑安全前提下以最快速度引导被困人员逃离火场,相较自行逃离,疏散时间减少约200%;多无人机场景中,4台无人机总体疏散时间相较于单无人机缩短7.39倍,相较于自行逃离更缩短14.59倍。同时,在疏散路径长度和当量长度上,多无人机协同显著优于单无人机,单无人机又显著优于没有无人机。仿真结果表明,本文提出的多无人机协同引导模型在建筑火灾应急救援中,可快速精准地搜索到最佳路径,使被困人员快速安全地逃离火场。
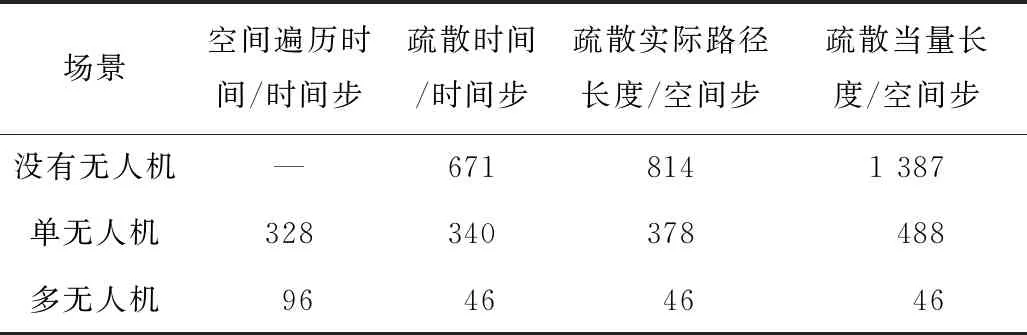
表2 仿真实验结果对比Table 2 Comparison of simulation experiment results
5 结论
1)基于对40 320种移动规则的对比测试,发现“左上>上>右上>左>下>左下>右>右下”移动规则法能够有效改善无人机空间遍历路径转弯次数多、重复率过高的问题。
2)无人机空间遍历“盲区”策略能够避免无人机陷入“盲区”,保证无人机遍历业务的连续性。
3)基于遗传-蚁群算法的路径规划算法,可有效避免单纯蚁群算法在求解时陷入局部最优,同时又能够保证求解后期速度的稳定性。
4)基于“障碍物空间场域”的建筑空间区域划分方法,可有效实现多无人机的空间任务分配,提高无人机协同搜救效率。
5)本文所构建的无人机引导模型从理论上探讨利用无人机进行复杂建筑空间人员应急疏散引导的可能性,但仍需进一步研究相关技术的优化和论证无人机的可靠性、可用性、维修性和安全性问题,为无人机引导人员疏散真正应用于应急实践提供科学支撑。
猜你喜欢
舰船科学技术(2022年20期)2022-11-28
小学生学习指导(低年级)(2020年10期)2020-11-26
数学小灵通(1-2年级)(2020年9期)2020-10-27
动漫界·幼教365(中班)(2020年3期)2020-04-20
铁道通信信号(2020年9期)2020-02-06
创新作文(1-2年级)(2019年4期)2019-10-15
智富时代(2018年5期)2018-07-18
智富时代(2018年5期)2018-07-18
作文大王·低年级(2017年11期)2017-12-05
小学生学习指导(低年级)(2017年12期)2017-11-22