
军用作战无人机未来发展研究*
2022-12-09 10:07薛德鑫徐宁骏董士军董绍阳
指挥控制与仿真 2022年6期
薛德鑫,单 涛,徐宁骏,郭 浩,董士军,董绍阳
(1. 江苏自动化研究所,江苏 连云港 222061;2. 北京理工大学,北京 100081)
无人机自20世纪60年代越南战争时期,首次被派到战场执行侦察任务,正式进入军事作战领域,其作为一种新型作战样式,开启了无人化作战先河[1],几十年来,无人机以侦察、预警、电子干扰、空地打击等“多面手”的角色出现在海湾、科索沃、阿富汗、伊拉克、土叙、纳卡等局部战争或冲突中,并取得惊人效果[2],尤其在纳卡冲突中,无人机首次作为主战装备参与作战,更是第一次将无人机协同作战从概念转化为实战,并取得卓越的战绩,充分证明了无人机作战的军事价值。可以预见,随着世界新军事革命的不断推进,无人机作战必将成为无人化作战的重要组成部分。
无人机作战能力虽已多次经过现代战争检验,但纵观现代战争中的无人机实战案例,可以发现其存在一些共性缺陷,如弱/无自主,不注重隐身,严重依赖无线电通信技术及卫星导航技术,而现代反无人机技术正是利用这些缺陷作为切入点,成为无人机在战场上的克星。随着战场环境的日益复杂化,防空反无人机技术高速深入发展以及战争由信息化向智能化的转变[3],军用作战无人机必须针对性地做出改进,才能适应未来高烈度、高技术、高电磁复杂度、威胁目标多样的战场环境。
本文以弥补无人机作战样式不足为出发点,以适应复杂的未来战场环境,应对防空反无人机技术体制为目的,结合现代及未来可预见的技术,对军用作战无人机未来发展方向与特征进行探索与思考。
1 军用无人机实战案例分析
自无人机跻身军事作战领域后,其实战案例举不胜举,但极具代表性、较经典的当属纳卡冲突及苏莱曼尼刺杀行动中的无人机作战应用。
1)纳卡冲突
纳卡冲突中参与的无人机数量多,种类全,初步体现了协同、联合的体系化作战样式,无人机首次作为主战装备并对战局起决定性作用。据阿方国防部战报数据,在冲突首个星期,阿方就已摧毁了亚方230辆坦克和装甲车、250门火炮和导弹系统、38套防空系统、10个指挥中心、7个弹药库、130辆军用车辆、1个S-300防空系统[4]。TB-2无人机回传的作战打击图如图1所示。

图1 TB-2无人机打击地面部队和“萨姆-8A”防空系统
2020年9月,阿塞拜疆与亚美尼亚爆发军事冲突,阿方一改往日地面部队长驱直入的战术,综合运用“赫尔墨斯”450型无人机、“苍鹭”无人机、“哈洛普”无人机、安-2无人机、TB-2无人机协同作战。阿方首先前出“赫尔墨斯”450和“苍鹭”无人机纵深侦察亚方防空装备布置情况,随后出动安-2无人机诱使其防空系统工作,最大程度地暴露并消耗其防空力量,然后利用多架配备反辐射导引头的“哈洛普”无人机携带炸弹,攻破亚方暴露的防空系统,在亚方大量的防空力量被摧毁后,阿方派出多架携带MAM-C和MAM-L激光半主动制导导弹的TB-2无人机纵深攻击亚方境内军火库、指挥所、军事基地,同时攻击其主战坦克、装甲车、火炮等地面装备,掌控了战场的制空权和主动权。作战流程图如图2所示。
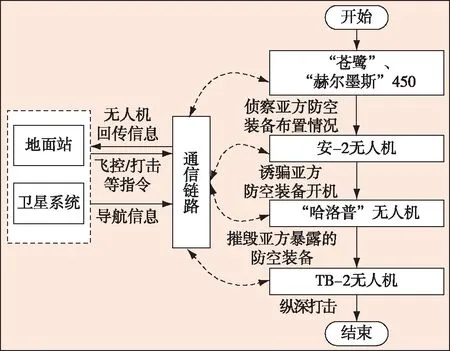
图2 阿方无人机作战流程图
2)苏莱曼尼刺杀行动
苏莱曼尼刺杀行动在短时间内完成发现、确认、发射和摧毁等一系列动作,当场击杀了有着“中东谍王”之称的苏莱曼尼,展现了极高的战术水准[5],同时也体现了世界先进的察打一体无人机的极限作战能力,从无人机作战运用层面来看,苏莱曼尼刺杀行动无疑是无人机单机执行任务的经典之作。苏莱曼尼刺杀现场如图3所示。

图3 苏莱曼尼刺杀现场
2020年1月3日,伊朗“圣城旅”指挥官卡西姆·苏莱曼尼在巴格达国际机场乘车准备返回官邸时,美军从卡塔尔出动一架MQ-9“死神”察打一体无人机对其进行刺杀,整个刺杀过程分为三个阶段。1)巡航锁定。由于美军已事先掌握了苏莱曼尼的行踪,MQ-9“死神”无人机早已从卡塔尔飞至巴格达上空巡航待命,他一下飞机就已经被在9 000 m高的“死神”牢牢锁定了。2)捕获跟踪。MQ-9“死神”利用先进的多光谱瞄准系统获取地面人员高清视频和图像,通过图像匹配识别,确定捕获目标。3)击杀。待苏莱曼尼车队行驶至预设刺杀区域时,远在白宫的战情办公室下达攻击命令,多枚“地狱火”从天而降并精准命中目标,完成刺杀任务。作战流程图如图4所示。
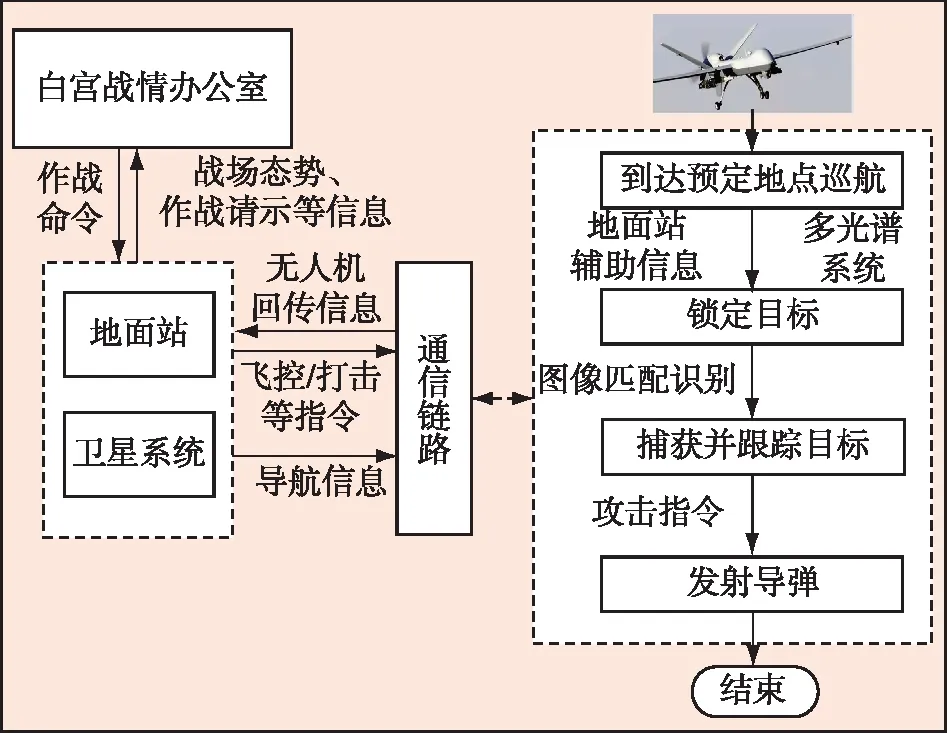
图4 MQ-9死神无人机作战流程图
从上述实战案例中,我们可以发现现代战争中无人机作战样式有如下共同特点:
1)人在回路中。受限于智能自主技术水平,现代无人机作战样式绝大多数都采用人在回路中的弱/无自主模式,即由人控制无人机完成OODA各环节。
2)不注重隐身。因无人机参与的现代战争大部分为低烈度、非对称战争,对方防空能力较弱,探测预警手段单一,所以参战的无人机极少做隐身处理。
3)高度依赖通信链路。通信链路是无人机的生命链和作战效能发挥的保障链[6],受自主能力、作战模式所限,现代无人机执行任务时,高度依赖无线电通信链路与地面站进行信息交互,从而实现诸如图像回传、指令下发等功能。
4)高度依赖卫星导航。无人机的定位导航技术有很多种,如视觉导航、惯性导航、卫星导航、多普勒导航,但受精度、体积、计算量等因素的约束,目前,世界上绝大多数高性能作战无人机基本上使用了卫星导航+其他导航的组合导航方式。
2 反无人机技术分析
事实上,随着无人机越来越多地直接介入现代战争并逐渐成为决定胜负的关键因素,世界各军事强国纷纷开始针对性地发展反无人机技术,无人机作战和反无人机作战构成矛盾体,攻防双方的技术能力此消彼长呈波浪式前进趋势,因此,从反无人机作战技术特点可以直接有效地窥见现代无人机作战样式的缺陷和不足。综合目前世界上典型的先进反无人机系统及技术,如美国的轻型防空综合系统(LMADIS)、移动式低慢无人机综合防御系统(MLIDS)、陆基防空定向能系统(GBAD),俄罗斯的“蔷薇”电子战系统、“克拉苏哈-4”电子战系统、“铠甲”系统[7],可将作战流程分为预警、识别、打击三部分,反无人机作战流程如图5所示。

图5 反无人机作战流程
从图5可以看出,反无人机技术是对标无人机作战样式特点进行探测、反制手段的适配,如利用无人机作战样式的不注重隐身,高度依赖通信链路的特点,分别采用雷达、无线电侦测及红外传感器对其进行预警探测,利用无人机作战样式的人在回路中,高度依赖通信链路,高度依赖卫星导航的特点,分别采用遥控指令欺骗、无线电干扰与导航诱偏对其进行软杀伤。具体的反无人机技术手段与无人机作战样式特点适配关系如图6所示。

图6 适配关系
依据目前及可预见未来的技术能力来看,无人机无法具备针对可见光识别的有效隐身能力,本文不做讨论;对于硬杀伤而言,由于其需要探测识别系统提供的精准目指信息,本文认为其应适配于无人机作战样式的不注重隐身及高度依赖通信链路的特点。
综上分析,反无人机技术作为无人机作战强劲的对手,其发展的核心技术及指导思想就是以无人机作战样式特点为切入点,正如纳卡冲突后期,阿方所向披靡的TB-2无人机遭遇俄“克拉苏哈-4”电子反无人机作战系统,“克拉苏哈-4”对其实施通信链路及导航信息干扰,成功击落9架TB-2无人机。再如2018年,伊朗的反无人机系统利用导航诱偏方式,将MQ-9“死神”无人机诱偏到地面“没收”,此前,伊朗用同样的方法捕获了美国MQ-1“捕食者”无人机及RQ-170“哨兵”无人机,因此,上文中无人机作战样式的共同特点亦为其“软肋”。
3 军用作战无人机未来发展重点
从美国的“第三次抵消战略”突出发展的能力可以看出,未来战争将呈现三个发展方向[8]。1)战场物理空间呈分布式一体化发展,具有作战单元多,作战环境复杂,多域联合立体化等特点,将迫使参战方耗费大量ISR资源及时间进行感知与规划;2)作战时间进程向快速化发展,具有高烈度、高实时等特点,以赛博空间为代表的网络信息电子电磁一体化作战,要求参战方具有高OODA循环速度,具备强抗干扰能力[9-10];3)作战技术应用趋于智能化发展,具有感知智能化、判断智能化、决策智能化、打击智能化等特点,要求参战方必须从作战体系到装备、作战策略到行动等每个环节都尽可能地智能化,以满足未来战争的战略平衡的需要。
随着大数据、云计算、人工智能等技术的发展以及世界各国对制空权的日益重视,未来防空反无人机体系必定会推陈出新,必然向构建多手段、多层次、立体化联合智能自主防御体系方向发展[11],通过提高多源探测能力,提高多手段复合拦截能力及建立高效智能指挥体系,实现信息全源化,探测全域化,决策智能化,打击全向化的能力,极大地缩短OODA环路周期,从而降低无人机破防概率[12]。
因此,军用作战无人机为顺应新军事革命发展及未来战场作战需求,必然要进行适应性发展与优化,然而,在面对未来环境高复杂,博弈强对抗,响应高实时,边界不确定的智能化战争,依靠传统技术难以对现有问题做出改善[13],必须结合人工智能、数据融合、创新材料等高新技术。
欧洲宇航防务集团曾提出,“如果出现一种武器可以在前期侦察探测,中期跟踪寻的,最后摧毁目标,整个过程完全实现自主化,那便可以在与指挥端失联的情况下继续自主完成攻击,大大提高作战能力[14]”。根据微处理器摩尔定律可知,未来无人机将具备超越人脑水平的数据存储与处理能力,届时能更好地结合人工智能算法。可以预见,未来将通过人工智能技术赋能无人机作战OODA各环节,驱动各环节高效运行[15]。未来无人机将奉行“以快吃慢”的法则,在高烈度、高实时的战场占据主动权,摆脱通信链路控制,解决人在环路中模式存在的抗干扰诱骗能力差,识别不准等问题;结合人工智能、数据融合等技术使无人机具备自主目标识别、自主规划路径、自主避障等能力,实现卫星拒止环境下的无人机的精确自主导航飞行,从而适应高动态、高复杂度、不透明的任务环境[16-17];结合材料、结构等技术研究发展高性能隐身无人机,实现对雷达、红外等主被动探测手段的隐身功能,同时兼顾气动、结构等方面性能的最优化,使其具备高水平战技指标,遂行完成高难度任务。
3.1 高性能隐身
无人机的隐身性对提高其战场生存能力至关重要。现代无人机隐身技术都是以特定探测器为对象的单项隐身技术的物理叠加[18],经常将雷达隐身设计和红外隐身设计分开进行。雷达隐身设计的主要目的是减少雷达散射面积,主要技术包括外形隐身技术及材料隐身技术,外形隐身技术通过合适的外形设计,整体上降低雷达回波幅度或将雷达回波主要能量集中在重点方向,材料隐身技术通过使用雷达吸波材料,可将入射的电磁波吸收或散射衰减掉,从而减少雷达散射面积;红外隐身设计的主要目的是降低无人机红外辐射特性,主要技术包括降低机体表面温度及红外发射率,通常采用涡轮风扇发动机减少散热,在高温部件表面涂覆专用涂料以降低红外发射率,合理设计机身外形来遮挡排气系统的高温热壁,遮挡二元喷管和喷流这两个高温系统等。现代无人机隐身技术代表性产物有美国X-47B无人机、法国“神经元”无人机、英国“雷神”无人机、以色列“哈比”-2无人机等。
单项隐身技术通常不能应对除特定探测器外的其他威胁,难以应对日益高精度化、智能化、多元化的探测手段,且往往要在气动、结构等多方面进行协调折中,从而影响无人机性能。因此,对无人机隐身技术提出了更高的要求,随之涌现了一些新型隐身技术,其中,等离子体隐身技术以其独有的优势迅速成为该领域重要发展方向。
等离子体由大量正电离子、自由电子、中性原子组成,整体呈中性,但有较强导电性。该技术采用等离子体发生器或放射性同位素,使得机体表面形成一层等离子云,由外部发射的探测电磁波及内部辐射的红外电磁波到达等离子云层,等离子云层将电磁波的一部分吸收,另一部分改变传播方向散射,这一方面可以降低机体的雷达、红外探测特性从而实现隐身,另一方面可以对敌探测系统起欺骗诱导作用。该技术无须改变无人机气动外形设计,从而最大程度地保证了无人机的性能。目前,俄罗斯在该技术方面处于世界领先地位,其第三代等离子产品已经应用于“米格”-1.44隐身战机,该产品可在4~4 GHz频率范围内使飞机雷达散射截面减小99%[19]。
3.2 自主导航
目前,军用作战无人机采用的导航技术主要是惯性导航、卫星导航、多普勒导航、地图匹配导航及地磁导航。由于各种导航技术各有利弊,现有军用作战无人机导航大多融合多种导航技术,利用它们的互补特性来形成更高性能的组合导航。考虑未来高电磁复杂度、高电通对抗条件的战场环境,卫星导航易受干扰、欺骗,有源导航易被侦察反制,无人机必须在不依赖外界卫星导航信息和保持对外电磁静默的情况下,实现高精度的导航,快速准确地到达预定作战区域。
因此,需开展包括视觉导航、天文导航、惯性导航、地图匹配导航及地磁导航等自主、隐蔽、抗干扰、静默无源的全源组合导航技术的研究。鉴于传统导航定位技术在精度、环境适应性、体积、计算量等方面存在的问题,还需积极发展新型高性能、轻小化导航技术,比如基于MEMS、半球谐振陀螺的惯性导航、数据库匹配导航、仿生导航、量子无源导航等,并立足于实战应用,通过深度强化对各种战场环境、不同运动状态的学习,有效提取全作战过程时空的高级特征,避免进入局部最优状态[20-21],实现基于深度强化学习的离散动作空间的自适应切换与快速重构的组合导航系统,以确保无人机面对不同环境时,能实时自主做出最优的导航组合策略,保证其自主导航的鲁棒性和精确性;结合深度学习与数据融合技术,实现动态时变战场环境及障碍物的实时感知,统筹全局与局部路径规划方法,研究基于导航信息、环境类型、障碍物类型的自适应路径规划技术,完成复杂环境下面临动态/静态/远/近等多种障碍物的实时避障及合理路径规划功能,从而解决无人机自主飞行的三个基本问题,即“我的周围环境怎么样”“我在哪里”“我下一步该怎么做”[22-23]。
3.3 OODA环路自主
OODA环路自主化的目的是结合人工智能技术赋能OODA环路节点,提高人在回路中模式的效率,缩短其循环周期,以适应高烈度、强对抗的作战需求,本文将OODA环路划分为自主目标识别判断(即感知和判断)和自主攻击(即决策和行动)。
1)自主目标识别判断。自主目标识别判断是无人机遂行自主攻击、毁伤评估等后续动作的前提和基础。未来战争中,随着目标隐身性能、机动性能和干扰场景复杂度不断提高,导致目标数据具有稀疏性、不确定性、多变性等特点[24],因此,对目标探测识别提出了更高要求。传统目标识别方法一般针对特定的目标和环境,采用人工识别或者基于人工标定目标特征的机器识别,存在识别目标特征信息维度低,实时信息处理能力不足,应用场景单一,泛化性能不足等缺点,且面对弱隐目标时,单一传感器无法客观准确地提取目标特征。因此,需攻克基于多探测信息融合的弱监督深度学习的自主目标识别技术,研究基于复杂战场环境的三维场景孪生建模及图像仿射变换、裁剪与拼接的样本增广技术及样本动态可扩充模型,构建场景丰富、多视角、高维度的目标样本,为基于弱监督深度学习算法模型的目标识别能力训练和增量推理学习提供充足的数据支撑;研究多源异构信息数据质量定准、信息相似性计算、信息多义性处理、信息关联处理技术[25-26],结合深度学习与数据融合技术,深度挖掘多源异构信息的有效特征信息,实现面向低特征目标的多维/多源异构信息融合的自主目标识别能力[27];结合深度学习与专家知识系统,实现目标行为自主理解与判断、战场态势判断,支撑后续自主打击决策生成环节;研究轻量化算法模型,减少计算复杂度及所需资源,实现理论向实践的转换,缩短OODA环路中的感知判断时间。
2)自主攻击。受伦理、人道主义等约束,至今,真正意义上“人在环路外”的完全自主的攻击型武器系统是不存在的,大多数作战无人机都需要在操作员的控制下实施攻击任务,按照机器人不能剥夺人的生命权的原则[28-29],应保证人在作战过程中的主体地位,体现人对无人机的绝对控制能力,其中最主要的就是将开火“扳机”掌握在人手里。因此,无人机的“自主攻击”决策应该完全符合人的意识,需要研究基于专家知识系统的智能自主攻击,模仿人类整体决策功能。虽然单纯的专业知识在具有较强的相关线索性及较好的状态区分度的作战环境中可以产生有效的决策[30],但在复杂的非结构化战场环境中,将不可避免地产生模糊性、滞后性、偏差性。因此,需要对基于专家知识系统的攻击规则、条件等进行提炼、赋值,形成改进知识,在满足约束条件时快速形成攻击决策,并根据时变作战环境进行动态实时决策重构,以确保无人机在非结构化作战环境中自主做出的攻击决策具备实时性、可预测性、可解释性。同时,应突破基于深度学习的智能飞控技术,无人机能实现根据战场环境、目标态势、攻击决策等进行多控制模式在线切换重构的能力,使其遂行决策自主化、控制智能化的自主攻击任务,缩短OODA环路中的决策和行动时间。
4 结束语
在新军事革命背景下,战争形态由信息化向智能化、无人化转变,因此,智能无人化作战将成为未来战争的主要形式,而无人机作战作为无人化作战主要形式之一,势必在未来军事发展中占有举足轻重的位置。本文检索研究大量文献,通过分析发现现代无人机作战样式的不足,通过对标未来战争特别是防空行动中反无人机技术发展方向,对军用作战无人机的隐身、自主导航、OODA环路自主方面提出建议,希望为军用作战无人机及其作战样式的后续发展提供参考。
猜你喜欢
天然气与石油(2022年4期)2022-09-21
天然气与石油(2021年5期)2021-11-06
科学24小时(2021年9期)2021-09-07
戏曲研究(2021年4期)2021-06-05
化工管理(2021年7期)2021-05-13
天然气与石油(2021年1期)2021-03-08
价值工程(2019年15期)2019-07-17
科学与财富(2018年34期)2018-01-15
课堂内外(初中版)(2015年9期)2015-09-10
红领巾·探索(2015年5期)2015-05-27
