
三相容错电机系统断相故障转矩脉动抑制方法
2022-12-05 06:36何露漫崔佩娟杨玉凯郑再平
导弹与航天运载技术 2022年5期
何露漫,崔佩娟,3,傅 捷,杨玉凯,郑再平,3
(1. 北京精密机电控制设备研究所,北京,100076;2. 航天伺服驱动与传动技术实验室,北京,100076; 3. 哈尔滨工业大学,哈尔滨,150001)
0 引 言
机电作动系统因其组成简单、使用维护方便、可靠性高等特点,已广泛应用于航天与航空飞行控制领域[1]。更高可靠性、更高比功率是航天领域机电作动系统的技术发展方向,余度与容错是提升机电作动系统可靠性的主要技术途径。多余度可有效提高系统整体的可靠性,但设备的冗余也增加了系统的复杂度、体积和重量,难以实现高功率密度[2,3]。容错控制可较好兼顾系统可靠性与复杂度,在不过多增加资源的情况下,进一步提升航天飞控执行系统的性能。
目前应用较广的永磁同步电机控制技术为基于空间矢量脉宽调制(Space Vector Pulse Width Modulation,SVPWM)的矢量控制,国内外针对其断相容错控制展开了一系列研究。Bennett等对三相容错电机和多相容错电机的驱动拓扑的可靠性和功率特性进行了比较[4,5]。其中,三相四桥臂逆变器驱动拓扑复杂度低、可靠性高、输出功率较大。Wei Wang等提出了在断相前、后采用同一模型预测控制的方法[6],Bolognani等提出了基于电压前馈补偿和基于电流滞环控制器的容错控制策略[7,8],实现了断相故障前、后控制策略的切换并基本保持故障前的输出性能,但由于依赖模型参数或阈值设置,模型预测控制、电压前馈补偿和电流滞环控制均存在转矩脉动大的问题。方敏、孟云平等采用零轴补偿与零轴电流修正的方法,实现单相断路故障时的转矩脉动补偿[9,10],但故障后采用的SVPWM与正弦脉宽调制(Sinusoidal Pulse Width Modulation,SPWM)结合的方法较为复杂,且需要检测电机三相及中性点电压。本文针对已开发的三相容错电机系统,分析其断相故障前、后转矩脉动的机理,提出由SVPWM统一调制且考虑谐波抑制的前馈补偿容错控制策略,在抑制转矩脉动的同时,不增加调制的复杂性,设计并开展验证试验,验证所提控制算法的有效性。
1 三相容错电机系统
本文研究的三相容错电机系统主要包括容错电机本体、容错驱动控制器和动力电源等。
容错电机本体的定子采用集中绕组结构,转子采用表贴式永磁体结构。三相容错电机须具备物理隔离、磁隔离、热隔离及短路电流抑制的能力,因此,在定子三相之间均设置隔离小齿。驱动拓扑为三相四桥臂逆变器拓扑,定子绕组采用星型连接,与三相逆变器连接,中性点引出,与第四桥臂连接,如图1所示。

图1 三相四桥臂逆变器拓扑与电机结构示意 Fig.1 Sketch of Three-phase Four-leg Inverter Topology and Motor Structure
断相故障发生后,故障相桥臂的逆变器关断,第四桥臂的逆变器导通,并由已断开桥臂的调制信号控制。与其他常用拓扑相比,三相四桥臂逆变器拓扑不需要连接直流母线中点,适用于星型连接三相永磁同步电机,且电压利用率较高,所需开关器件较少。
2 三相容错电机断相故障前、后转矩脉动产生机理分析
三相永磁同步电机的转矩脉动与电机本体的转子磁极结构、齿槽效应和绕组分布形式等因素引起的气隙磁场畸变和电流高次谐波相关。针对本文研究的三相容错电机,分别分析上述因素的影响,电机主要参数如表1所示。
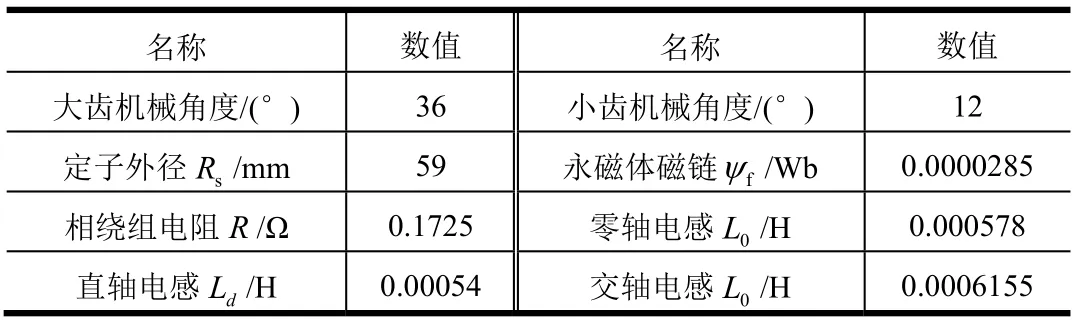
表1 电机主要设计参数 Tab.1 Main Design Parameters of Motor
2.1 转子磁极结构影响
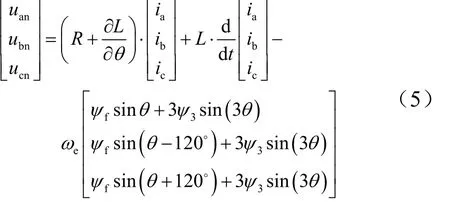
实际电机的磁极磁场并非完全正弦分布,通常还包含一系列谐波分量,因此产生的电机三相绕组的感应电动势也呈非正弦分布。本文所研究的电机受转子磁极结构的影响,绕组感应电动势存在明显谐波分量,三相反电动势电磁仿真分析结果如图2所示,经过傅里叶分析,三次谐波幅值为基波的7.2%。因此反电动势三次谐波分量不可忽略,电机的反电动势为

图2 三相容错电机的相反电动势 Fig.2 Phase Electromotive Force of Three phase Fault-tolerant Motor

式中eω为电机的电角速度;fψ和 3ψ分别为永磁体基波和三次谐波磁链;θ为转子位置。
由于电机三相绕组分布对称,故障前电机各相反电动势三次谐波与电流产生的输出转矩可以互相抵消,但发生断相故障后,由于故障相输出电流为零,即使改变两个正常相的参考电流,仍然存在二次和四次转矩谐波分量,导致输出转矩存在较大的波动。
2.2 齿槽效应影响
齿槽转矩可通过计算永磁体与定子齿和槽开口之间气隙的磁能积得到[11]:

式中B为气隙磁密;W(α)为磁能积;Tco(α)为齿槽转矩;Ls为电机轴向长度;μ0为空气磁导率;Rs和Rm分别为电机的定子半径和转子半径;F(θ,α)为气隙磁动势;Λ(θ)为气隙磁导;α为转子直轴偏移定子小齿轴线的角度。
建立该三相容错电机电磁仿真模型,结果显示在全转速范围内齿槽转矩的最大幅值为-0.06~0.055 N·m。该电机的最大转矩为2.7 N·m,齿槽转矩的占比为1.67%~2.15%。
2.3 绕组分布影响
如前所述,为提升容错电机的故障隔离性能,定子在三相绕组之间设置隔离小齿结构,该小齿角度的取值会直接影响绕组分布效应。绕组系数可表示为

式中kNVe为绕组系数;β为隔离小齿角度;kyVe为磁动势短距系数;kqVe为分布系数;Ve为谐波次数,Ve=2k+ 1,k= 0,1,2…。
绕组系数与隔离小齿角度关系如图3所示,为使绕组系数最大,三相隔离小齿的角度设计为12°,此时绕组系数为1,其基波磁动势短距系数与分布系数均为1。
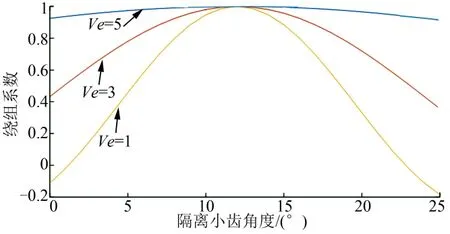
图3 绕组系数与隔离小齿角度关系 Fig.3 Relationship between Winding Coefficient and Angle of Isolation Tooth
综合以上分析,本文研究的电机齿槽转矩在电磁转矩中的占比较小,且无绕组分布因素引起的转矩脉动,但存在较大的反电动势三次谐波,在发生断相故障后将引起较大的转矩谐波分量,是故障后转矩脉动产生的主要原因。
3 控制策略
3.1 考虑三次谐波的三相永磁同步电机模型
考虑反电动势三次谐波项,电机的电压为
式中uan,ubn,ucn为三相电压;ia,ib,ic为三相电流;R为相绕组电阻;L为相电感。发生断相故障后,故障相电流为0,电机模型为

式中uxn,uyn为正常相电压;ix,iy为正常相电流;Lf为断相故障后剩余两相的电机电感。
3.2 考虑谐波抑制的断相故障容错控制策略
为实现电机在断相故障后保持正常运行时的性能,在隔离故障相后,通过改变剩余两个正常相电流的参考控制量,使其幅值增大为原来的3倍,相位差变为60°,从而实现电机在故障后的转矩不变。
假设A相断路,由于A相逆变器关断,故usa=0,usn等于正常运行时的usa。对比图4中逆变器端的电压usa,usb,usc和电机端的电压ua,ub,uc:

逆变器端的电压usa,usb,usc和电机端的电压ua,ub,uc均可通过同一坐标变换转换到d-q坐标系下。因此,通过前馈电压补偿d-q轴参考电压ud*,uq*和ud**=ud、uq* *=uq的差值,即可补偿usn=un和ua的差值uan,从而实现电机的断相容错。由于ia=0,故障相电压方程为

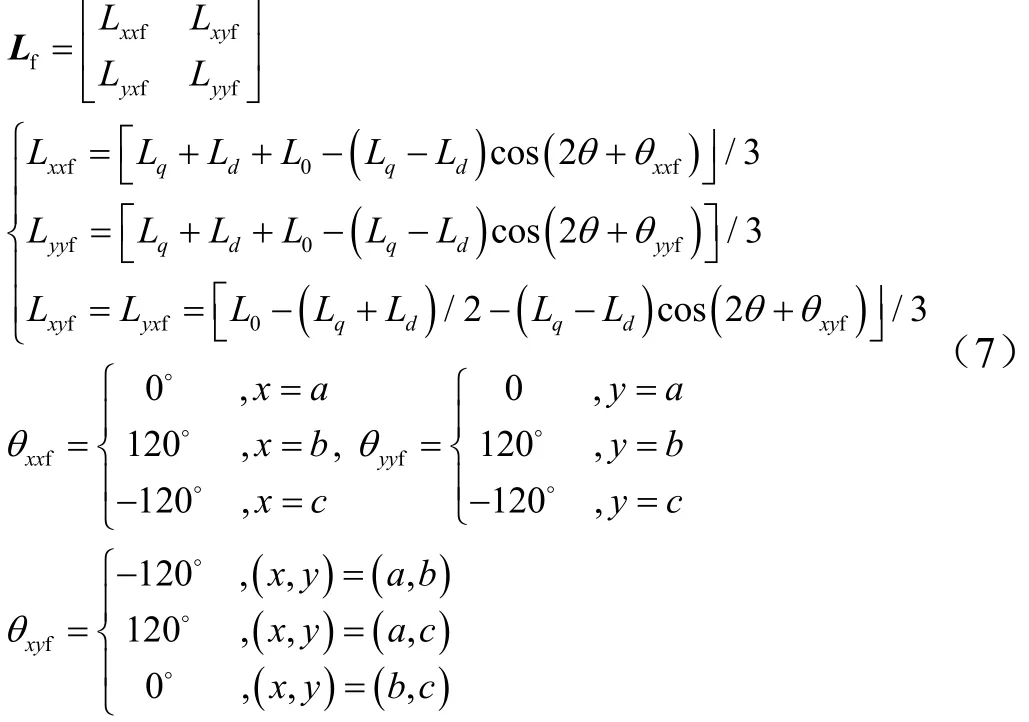
式中Lab和Lac为互感,可由式(7)得到。
通过坐标变换,可以得到usn=un和ua的差值uan,并转化为d-q轴的前馈补偿电压udf和uqf:
考虑反电动势三次谐波的前馈补偿可以实现输出转矩的基波在断相故障前后保持稳定,但是对断相故障后转矩脉动的抑制作用较小,前馈补偿后电机的输出转矩仍存在较大波动。
将前馈补偿后电机正常相的电流、反电动势代入电机的转矩方程,断相故障后电机的转矩为

为抑制故障后产生的转矩二次和四次谐波,注入三次谐波电流,使其与反电动势产生的转矩谐波抵消T2f、T4f。设注入电流为

联立方程,可以得到A相断路时,三次注入电流:

通过坐标变换,可以得到d、q轴的注入电流:

此时,由式(14)可知,d、q轴的参考电流不再是直流量,而是带有二次和四次正弦谐波分量的交流量,通过PI控制器无法很好地跟踪。因此,采用PI控制器与谐振控制器并联(即比例谐振控制器)的方式,分别跟踪d、q轴参考电流的直流量、二次、四次谐波分量。A相发生断相故障后,考虑谐波抑制的容错控制策略的整体框图如图4所示。

图4 容错控制策略原理 Fig.4 Fault Tolerant Control Strategy
4 试验验证
4.1 试验方案设计
试验装置如图5所示。通过测功机给三相容错电机施加机械负载,计算机向容错伺服控制驱动器发送指令信号,并由驱动器转化为驱动信号,驱动伺服电机按给定转速转动,伺服电机自带的旋转变压器将电机的位置信号反馈给伺服控制驱动器,并通过传感器将电流等输出信号采集并传输到计算机端。
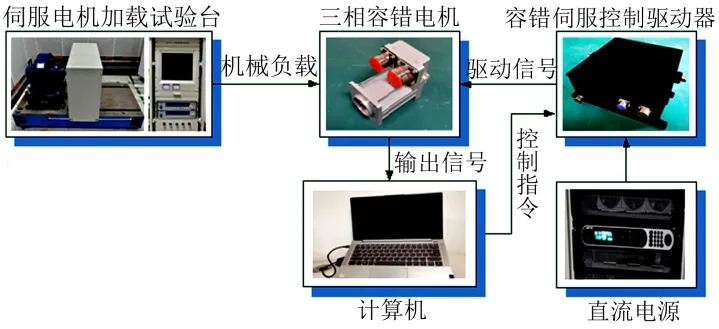
图5 试验装置示意 Fig.5 Schematic of Experimental Devices
4.2 转矩脉动产生机理验证试验研究
在空载的条件下测试三相容错电机在不同转速下的相反电动势,分析试验结果显示三次相反电动势在全速区间的占比为5.16%~6.19%且随转速升高而增大,是故障后转矩脉动产生的主要因素。对比电磁仿真与实测数据,发现理论分析与试验结果吻合度较好,空载反电动势和谐波成分对比分析如图6、图7所示(图7柱状图中左、右两条柱形分别代表实测值与仿真值)。
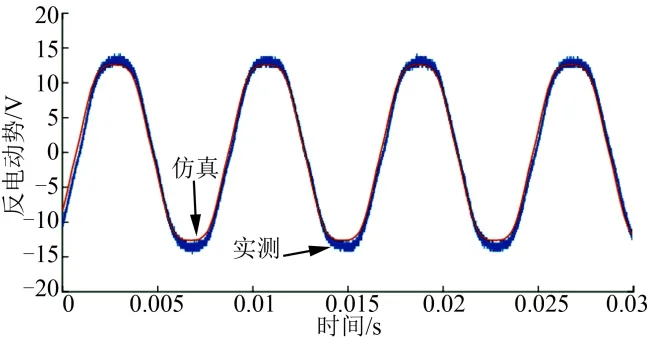
图6 空载反电动势 Fig.6 Idling Electromotive Force

图7 谐波成分对比 Fig.7 Harmonic Component Comparison
4.3 转矩脉动抑制策略验证试验研究
在400 转/min、1000 转/min、1500 转/min转速下,分别进行三相容错电机断相故障前馈补偿容错控制和考虑谐波抑制的前馈补偿容错控制对比试验,各工况下的转矩脉动率如表2所示。

表2 各工况下电机的转矩脉动率 Tab.2 Torque Ripple Rate of Motor under Different Operating Conditions
从试验结果可以看出:采用考虑三次反电动势谐波抑制的容错控制策略后,转矩脉动率有明显的降低,且在相同转速下,抑制效果随着负载转矩的增大更为明显。以400 转/min为例,施加不同负载,前馈补偿和考虑谐波抑制的前馈补偿两种容错控制策略下的转矩波形如图8所示,相比于传统的容错控制策略,断相故障模式下考虑谐波抑制的前馈补偿策略转矩脉动率下降了42.80%~47.29%。
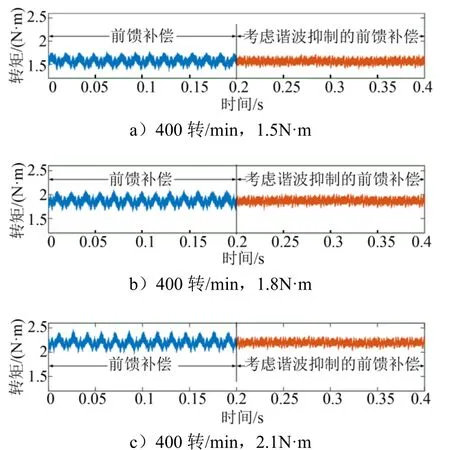
图8 400转/min下两种控制策略的转矩对比 Fig.8 Torque Comparison of Two Control Strategies at 400 r/min
5 结 论
本文在分析三相容错电机系统断相故障前、后转矩脉动产生机理的基础上,提出了考虑三次谐波反电动势的前馈补偿断相容错控制策略,并进行了多种工况的实验验证。结果表明:
a)针对电机系统断相故障,所提控制策略相较于单一采用前馈补偿,对转矩脉动具有明显的抑制效果,例如转速1500 转/min、转矩1.5 N·m工况下,转矩脉动率由20.05%下降至13.12%,有益于容错机电作动系统故障发生后输出品质的提升。
b)所研究的电机系统中,因电机本体结构而产生的反电动势三次谐波分量幅值为基波的5.16%~6.19%(全速区间),是电机断相故障后转矩脉动产生的主要原因,并呈随转速升高而增大的规律,电磁仿真分析与试验结果吻合度较高。
猜你喜欢
微电机(2022年8期)2022-10-12
中国特种设备安全(2022年3期)2022-07-08
微特电机(2021年11期)2021-11-16
防爆电机(2020年5期)2020-12-14
防爆电机(2020年3期)2020-11-06
哈尔滨铁道科技(2020年4期)2020-07-22
郑州大学学报(工学版)(2020年2期)2020-06-16
汽车电器(2019年2期)2019-03-22
电子制作(2019年23期)2019-02-23
舰船科学技术(2015年8期)2015-02-27
