
基于纺织材料的柔性外骨骼机器人研究现状
2022-12-05 07:59:56刘月娟傅宏俊李树锋钟智丽
毛纺科技 2022年11期
刘月娟,傅宏俊,李树锋,郭 欢,钟智丽
(1.天津工业大学 纺织科学与工程学院,天津 300387; 2.国家康复辅具研究中心 康复辅具质量检验中心,北京 100176)
脑卒中疾病是肢体残疾患者的主要病因,现已成为影响人类寿命与生活质量的头号杀手[1],这类患者普遍存在肢体运动功能障碍,康复训练是肢体残疾患者重获运动能力的重要途径[2]。然而传统的康复训练对专业医疗人员的依赖性较高,存在工作量大、治疗效率低、康复师不足等问题,这导致许多患者错失了最佳康复治疗的机会。随着近十几年机器人技术的快速发展,针对外骨骼康复机器人领域的研究逐步深入,外骨骼机器人能够帮助肢体残疾患者进行康复训练,替代专业康复师的人力看护,提高康复训练的效率[3]。除康复医疗领域外,外骨骼机器人在军事和民用方面也有广泛的用途,如提高士兵的持久作战能力,增强工人搬运能力等[4],因此外骨骼机器人具有很高的研究价值。
近年来,基于外骨骼机器人需求的研究也越来越受到重视。然而,现有的外骨骼机器人综述大多侧重于驱动和控制,较少从纺织服装领域出发,尤其缺乏纺织材料在外骨骼机器人中的应用。为此,本文在介绍刚柔性外骨骼机器人的基础上,聚焦纺织材料在外骨骼机器人上的应用进展以及外骨骼机器人新型材料的研发创新,对柔性外骨骼机器人所涉及到的纺织关键技术进行了详细的综述与分析,系统地说明纺织材料在柔性外骨骼机器人研制中的不可或缺的作用。
1 外骨骼机器人简介
外骨骼机器人是一种基于仿生学原理,通过模拟人体骨骼特征而设计的可穿戴设备[5],具有提升人体行走耐久性和协助人体康复训练等功能。根据本体材料的不同,可分为刚性外骨骼机器人和柔性外骨骼机器人。目前市场上具有代表性的外骨骼机器人大都采用刚性结构,如美国加州大学的BLEEX系列[6]、日本筑波大学的HAL系列[7]和瑞士苏黎世大学的Lokomat[8]等。刚性外骨骼机器人的优点在于其坚固耐用的结构以及力的精确传输性,但其质量较重、不易穿戴,且其安装也需要专业的培训人员,因此国内外对于外骨骼机器人的研究热点也逐渐向具有纺织材料的柔性外骨骼机器人方向转移[9]。如表1所示,与传统的刚性外骨骼机器人相比,柔性外骨骼机器人拥有更多优点[10],柔性外骨骼机器人采用柔性材料替换原本的刚性结构,其质量更轻、更灵活,并且舒适性好、助力更加自然,具有较高的研究价值。

表1 刚柔性外骨骼机器人对比
2 柔性外骨骼机器人研究现状
为了抢占国际高新技术的至高点,越来越多的国家开始关注基于纺织材料的柔性外骨骼机器人技术,并纷纷建立国家重点科研机构,如美国的革命性纤维与织物制造研究以及德国的“未来纺织”研究计划[11]。据《中国制造2025》显示,我国将大力推进智能医用及工业机器人产业的发展[12],这表明我国的可穿戴机器人技术也受到了高度重视。由于柔性外骨骼机器人自身所具有的独特优势以及广阔的应用空间,对柔性可穿戴外骨骼机器人的研究成为了当前外骨骼机器人研究的重点方向[13]。
2.1 绳驱动
绳驱动即采用鲍登线等线状或带状柔性结构,通过收缩线距传递拉力进行驱动,是柔性外骨骼机器人最为常见的一种驱动形式。
作为柔性外骨骼机器人领域的领军团队,哈佛大学Wyss实验室在2014年设计了一款多关节柔性外骨骼机器人[14],如图1(a)所示。该装置由电动机和鲍登线驱动,绑缚系统采用舒适性好的弹性纺织品作为绑缚带,使套装在没有被电动机驱动的情况下,也能通过弹性纺织带进行助力。2015年,该团队研制了一套辅助髋关节运动的便携式柔性外骨骼机器人[15],如图1(b)所示。这套柔性外骨骼机器人的特点是采用织带作为执行机构,将织带缠绕在电动机的线轮上以拉动下肢运动,织带可以为大腿提供高达150 N的力,有利于髋关节伸展。

图1 哈佛大学的绳驱动柔性外骨骼机器人
2015年,瑞士苏黎世联邦理工学院的感觉运动系统实验室设计了一款柔性外骨骼机器人系统[16],该系统可帮助下肢残疾患者恢复行走能力,如图2(a)所示。研究人员使用锦纶及其他材质的织带连接髋关节和膝关节,并使用传感器和鲍登线分别作为监测器和执行器,验证了利用关节协同作用的多关节防护服可用于腿部功能的康复。2017年,该团队设计了一款基于纺织品的新版柔性下肢外骨骼机器人Myosuit[17],如图2(b)所示,Myosuit 的质量为4.09 kg,可续航4 h,整体采用3层结构设计,即服装层、韧带层和力量层。该装置类似于一条裤子,腰带和大腿袖口均由非弹性锦纶织物制成,由多层聚酰胺和锦纶/涤纶层压板加固,可用于调节关节周围的力,使柔性外骨骼机器人在没有刚性框架的情况下依然可以保持结构的稳定。

图2 瑞士苏黎世联邦理工学院的柔性外骨骼机器人
2017年,中科院深圳先进技术研究院的吴新宇团队采用纺织材料设计了一款基于柔性传动的全身型助力外骨骼机器人服[18],如图3所示。这款柔性外骨骼机器人的质量约4 kg,具有10个自由度,采用钢丝绳作为柔性传输介质,研究人员还为这款外骨骼机器人设计了部分被动关节,提出了一种仅使用关节角度传感器、足底压力传感器和倾斜传感器的全身外骨骼机器人步态相位识别新方法,通过进行平地行走、上下坡以及搬运实验,证实了该系统具有良好的助力效果。

图3 中科院深圳先进技术研究院的柔性外骨骼机器人
2021年,北京工业大学李剑锋团队发明了一款穿戴式柔性下肢外骨骼机器人助力服[19],如图4所示。研究人员在研制织物外衣的基础上,对助力系统的控制与步态预测进行了详细研究。表面采用弹性面料以提高助力外衣的穿戴舒适性,同时,外衣上设计了韧性较强的开口环包裹于外侧,开口环采用锦纶材质,并用魔术贴收紧固定于腿部和腰部。该系统具有良好的穿戴舒适性,符合功能外衣的设计要求。
根据《膝关节功能评价标准》[3]中的相关内容对两组的康复效果进行评估:(1)优:,关节活动度超过100°。(2)良:关节活动度为81°~100°。(3)中:关节活动度为51°~80°。(4)差:关节活动度小于50°。

图4 北京工业大学的柔性外骨骼机器人
除此之外,韩国首尔国立大学开发了一款膝关节柔性外骨骼机器人助力服[20],用于克服老年人或残疾人因身体虚弱带来的不便,它由柔性纺织材料制成的连接布带组成,通过电动机牵引钢丝绳,将辅助力沿助力服传递至膝关节。澳大利亚国防部制备了一款军用被动柔性外骨骼机器人OX[21],该装置由纺织材料和2条鲍登线组成,制作成本低,质量小于3 kg,可将士兵2/3的负荷分散转移,从而减轻士兵负重。天津工业大学王子帅等[22-23]设计了一款柔性可穿戴助力行走外骨骼机器人,创新性地提出选用一种由3层织物组成的潜水料作为服装的主体面料,通过对3种潜水料的性能进行测试,得出一种由丁苯橡胶和氯丁橡胶混合制成的潜水料(SCR),其更适合作为柔性外骨骼机器人服装的非直接受力面料。此外,还有欧盟的XoSoft研究计划、哥伦比亚大学的C-ALEX、麻省理工学院的踝关节助力外骨骼机器人、日本松下电器的交叉线助力服[24-25]等相关外骨骼机器人产品的研究。
绳驱动作为柔性外骨骼机器人的主流驱动方式,多采用鲍登线通过收缩线距模拟肌肉运动以施加辅助力,具有柔性强、体积小、便携性好等优点。鲍登线由线管(外鞘)和钢丝绳组成,可以进行较大程度的准柔性弯折,方便实现助力载荷的远程传递,因此被很多柔性外骨骼机器人系统所采用,其缺点在于:钢丝绳和线管之间摩擦所产生的力学损耗较大,布线弯折较多时尤其明显;整体质量较重,不利于柔性外骨骼机器人系统的轻量化;钢丝绳、塑料外鞘等的特性决定了挠性结构较大,穿戴、行走舒适性欠佳。因此,选用优化的柔性材料与结构实现外骨骼机器人更为舒适、有效的驱动力传递是目前绳驱动柔性外骨骼机器人研究的关键问题。未来可探索运用纺织结构、复合材料等对鲍登线系统进行优化,如采用柔性更好的绳、带等结构代替钢丝绳,并优化外鞘材质与性能,使鲍登线系统在穿戴舒适性、安全性以及传力高效性等方面得以提升。
2.2 气动肌肉驱动
气动肌肉驱动是柔性外骨骼机器人的另一种主要驱动方式,指通过外部气压去改变人工肌肉的形态,使其模拟人体肌肉的收缩以实现驱动关节的运动。近年来,气动肌肉驱动因其质轻、柔顺以及安全性好的特点逐渐被许多研究机构关注。
哈佛大学Wyss实验室在2013年便开发了一款气动肌肉驱动的柔性外骨骼机器人[26],这款柔性外骨骼机器人被称为第1代Soft Exosuit,如图5所示。该装置的绑缚系统由多条布带组成,采用定制的McKibben型气动人工肌肉驱动,固定在外衣的结点处,通过拉放结点为下肢关节助力,该装置的总体质量约为10.6 kg,但是由于受到气动肌肉行程大小以及穿戴舒适性等因素的限制,该装置的助力效果并不理想。
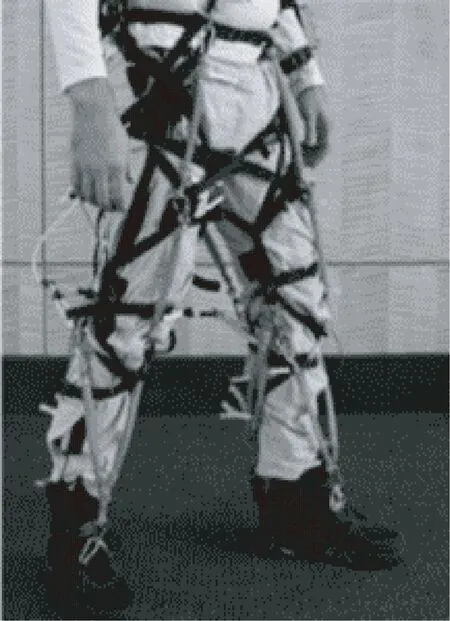
图5 哈佛大学的第1代Soft Exosuit
2013年,日本中央大学为有轻微步态障碍的人员研制了一款可穿戴助力行走外骨骼机器人[27],如图6所示。它以直纤维气动人造肌肉为驱动模块,通过收缩从腹部到膝盖的人工肌肉,帮助穿戴者双腿向前、向上摆动,从而实现髋关节屈伸,该装置具有较好的辅助人体运动效果。

图6 日本中央大学的柔性外骨骼机器人
国内外其他科研机构也一直致力于具有纺织材料的气动肌肉驱动柔性外骨骼机器人研发创新。2014年,卡内基梅龙大学设计了一款由弹性人造肌肉致动器和软织物套筒组成的柔性外骨骼机器人[28],用于主动协助膝盖支撑运动,由织物制成的裤袖减轻了设备的质量,使其更易于佩戴,该设备能够为膝盖伸展和弯曲提供动力。2017年,美国亚利桑那州立大学提出了一种用于膝关节康复的充气外骨骼机器人防护服[29]。该装置使用可热封热塑性聚氨酯制成的软充气执行器,使外骨骼机器人在步态周期中为膝盖伸展提供扭矩帮助。此外,还有密歇根大学的踝关节柔性外骨骼机器人、布鲁塞尔自由大学的KNEXO、根特大学的助力外骨骼机器人以及北卡罗来纳大学的气动助力外骨骼机器人系统等[10]。
与绳驱动相比,气动肌肉驱动的柔性外骨骼机器人质量相对更轻并且具有更高的功率密度,其工作模式也更接近实际肌肉,目前我国科研单位对于气动肌肉柔性外骨骼机器人的研究主要着重于医疗康复领域。气动肌肉的驱动过程具有高度非线性和时变性,导致其难以达到较高的控制精度,这也是目前对于气动肌肉柔性外骨骼机器人研究的重点和难点。此外,气体压强的变化、器件之间的摩擦以及气动肌肉的形状等对气动肌肉驱动的柔性外骨骼机器人的控制精度都有影响。因此,合理地利用纺织材料的优势改善气动肌肉性能以提高柔性外骨骼机器人的控制精度是气动肌肉驱动柔性外骨骼机器人未来的发展方向。
2.3 其他驱动
采用电动机直驱的柔性外骨骼机器人通常需要借助柔性材料以提高外骨骼机器人的穿戴舒适性。2021年,东华大学刘建辉[31]研制了一款下肢可穿戴外骨骼机器人,如图7所示,该系统的骨架采用铝合金材质。为了提高外骨骼机器人与人体间的界面舒适性,研究者通过织物的基本参数测试和织物拉伸性能测试,对绑缚系统的面料进行了选择,用选好的织带和硅胶制作出一种防滑的绑缚系统,并将该系统用于柔性外骨骼机器人装备上,该防滑绑缚系统的人机界面舒适性明显提高。

图7 东华大学的可穿戴外骨骼机器人
在运用弹性纺织面料作为柔性外骨骼机器人驱动方面,2019年,西安工程大学陈炳基[32]开发了一款依靠弹性面料助力的柔性下肢外骨骼机器人,结合人体工效学绘制了助力服的结构图,并通过织物性能测试选择织物,采用立体裁剪的方法制作出原型样衣。该助力服装采用纺织材料,传力系统采用了弹性纺织材料。在正常步态周期内,该系统装置的助力效果数可达0.276 7。
3 新型纺织材料在外骨骼机器人上的应用
目前国内外科研人员在对可穿戴外骨骼机器人的研究过程中,除了使用锦纶织带、涤纶织带等现有传统纺织材料外,还开始对外骨骼机器人可用的新型纺织材料进行研发创新,以下为国内外相关机构在可穿戴外骨骼机器人新型纺织材料方面的研究成果。
美国北卡罗来纳州立大学研发了一种类似包芯纱的混合纤维,该纤维的外层采用具有弹性的氢化苯乙烯-丁二烯嵌段共聚物(SEBS),中心为镓金属,这种纤维可以在大应变下消散能量,可将其应用于外骨骼机器人领域[33]。瑞士洛桑联邦理工学院研制了一款可以改变刚度的织带[34],它能够快速从柔软和可拉伸状态转换为僵硬和不可拉伸状态,有助于满足柔性外骨骼机器人在强度、安全度以及舒适性方面的共同需求。日本北海道大学开发了一种“自生长”凝胶材料,这种材料可以通过有效的机械性转导来应对重复的机械应力,为开发用于柔性外骨骼机器人和其他智能设备的自生长水凝胶材料提供了思路[35]。
碳纤维复合材料是实现外骨骼机器人轻量化和高性能化的首选材料[36]。在传统的刚性外骨骼机器人领域有着广泛的应用。上海傅里叶智能科技有限公司研制了一款医疗康复用下肢外骨骼机器人Fourier X1[37],如图8所示,该装置在基于人体工程学设计的基础上,大量使用碳纤维复合材料,使外骨骼机器人在负重感降低的情况下,整体结构刚度明显提升。

图8 上海傅里叶公司的Fourier X1
美国仿生控股有限公司(Ekso Bionic)研发了一款兼顾安全性和轻量化要求的可穿戴外骨骼机器人Ekso[37],如图9所示,该装置的关键部位由碳纤维复合材料、钛合金等多种轻量化材料组成,降低了外骨骼机器人装备的整体质量。目前,碳纤维复合材料在柔性外骨骼机器人系统中应用的公开报道尚不多见。但本文分析认为,碳纤维复合材料在柔性外骨骼机器人领域同样不可或缺,且一般是作为关键辅助材料使用,如用来制备某些关键部件实现轻量化与高性能化;在特定位置实现柔性结构的增强与挺括;电源、控制原件等的挂载、背负及防护系统,其制备过程中也会大量应用到碳纤维复合材料。

图9 美国仿生控股有限公司的Ekso
虽然目前国内外科研机构在可穿戴外骨骼机器人新型材料的研发上已经取得了一定的研究成果,但仍然无法满足人们对外骨骼机器人的不同功能需求。在新型纺织材料的研发过程中,可以从纺织材料自身性能的改善、多种纺织材料的复合、纺织材料的结构优化设计等方面出发,不断提升新型纺织材料的物理和化学性能,满足可穿戴外骨骼机器人质轻、高强、舒适性好等需求。新型纺织材料在外骨骼机器人领域具有极大的应用前景,新型纺织材料的研发是柔性外骨骼机器人性能获得突破的关键,也是未来柔性外骨骼机器人在纺织领域的主要发展方向。
4 关键技术分析
穿戴者与外骨骼机器人系统的关联如图10所示。从控制系统集成的思想来看,可将控制系统分为感知、传递、执行3个层面,控制系统接收穿戴者的运动信号,然后将指令传递给外骨骼机器人,外骨骼机器人上的绑缚系统带动穿戴者的肢体进行助力。尽管各类柔性外骨骼机器人的功能各不相同,但其总体的技术性能都大同小异。以下将围绕人体运动信息检测技术、绑缚系统的安全性与舒适性研究、功能性纺织技术等方面对与纺织相关的柔性外骨骼机器人关键技术进行分析。
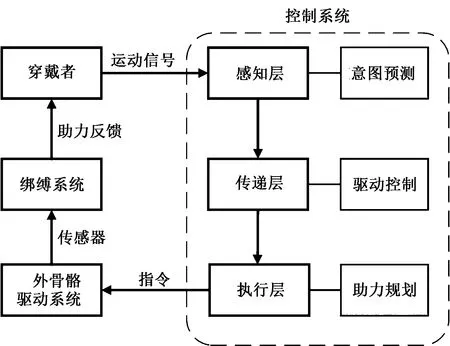
图10 穿戴者与外骨骼机器人系统的关联
4.1 人体运动信息检测技术
人体运动信息的检测是柔性外骨骼机器人系统在精确时间对需要助力关节提供恰当辅助力的关键,精确的检测技术可以避免出现人机系统不匹配的现象,提升穿戴者与柔性外骨骼机器人之间的同步速度。现有的人体运动信息检测技术有EMG表面肌电技术、EEG脑电信息检测技术、足底压力感知技术以及惯性传感技术等[24]。为了准确收集人体的运动信息、感知人体的运动变化,柔性外骨骼机器人的人体运动信息检测系统可与贴合人体的纺织材料结合形成新型的软传感系统,以便将传感器集成到柔性外骨骼机器人装备中。
4.2 绑缚系统的安全性与舒适性
作为柔性外骨骼机器人的重要组成部分,绑缚系统不仅是人机交互的物理界面,同时还关系到柔性外骨骼机器人的穿戴舒适性。常见的绑缚形式一般采用魔术贴绑带或弹力绑带,但是这种绑缚形式在行走过程中难以提供稳定的预紧力,易产生不适感,甚至会对人体造成损伤[38],如图11所示。为了提高绑缚系统的安全性和舒适性,绑缚系统的设计应从选择织物材料出发,合理控制绑缚压力,包括采用拉伸性能好的柔性亲肤面料作为与人体直接接触的面料,在压力集中的部位增加面料的厚度或选用减压性好的填充材料,选用由锦纶、涤纶、氨纶等纤维组成的具有良好耐磨性和弹性的面料,并根据面料性能分别用于绑缚系统的不同部位上[39]。除此之外,绑缚系统的设计应满足穿脱方便的基本要求,尽量精简绑缚构件,减少穿脱时间。

图11 绑缚系统的安全性与舒适性
4.3 功能性纺织技术
在柔性外骨骼机器人系统的设计中,既要满足柔韧性和灵活性好,又要与不同穿戴者的服装兼容,并且还应具备不同穿戴者所需的功能。为了实现这些需求,从纺织角度出发,主要有纤维性能增强和功能性材料植入2种途径。纤维性能增强方面,运用碳纤维蜂窝内芯减重增强工艺,将碳纤维与蜂窝板的结构相融合,完成质轻和高强的结合,强化外骨骼机器人的连接刚度[40];运用锦纶功能改性增强工艺,根据使用需求在锦纶中加入玻璃纤维、碳纤维等材料,改善锦纶物理机械性能。功能性材料植入方面,主要包括电子器件编织植入技术、调温材料植入技术以及液态护甲植入技术。电子器件编织植入技术是指将电子器件通过编织的方式整合到织物中,以实现柔性外骨骼机器人所需的特定功能;调温材料植入技术是指将具有温度调节功能的相变材料整理到面料表面或填充到中空纤维中,相变材料可以根据人体温度变化吸收或释放能量,使柔性外骨骼机器人服装内维持一个相对稳定的温度;液态护甲植入可用于单兵作战的柔性外骨骼机器人中,使用的材料是通过纳米技术转化的液态硅(STF),这种材料制成的液态护甲质量轻、防护性好,在正常情况下如液体般自由流动,当被利刃或枪弹击中时会迅速变硬以阻挡枪弹穿透,保护士兵的生命安全[41]。目前科研人员对于纺织领域的纤维性能增强技术和功能性材料植入技术研究广泛,但将这2种技术运用到柔性外骨骼机器人上的研究少之又少,未来需要科研人员充分运用纤维性能增强和功能性材料植入技术,设计出满足不同功能需求的柔性外骨骼机器人。
4.4 其 他
除上述3种与纺织相关的关键技术以外,柔性外骨骼机器人的关键技术还包括柔性驱动与控制技术、安全性与可靠性设计、人机柔性匹配技术以及助力效能评估等。在研究以上技术时,为了提高柔性外骨骼机器人的助力效率与灵活性,选择合适的柔性材料并合理布局柔性材料是柔性外骨骼机器人系统研究的关键所在,也是当前柔性外骨骼机器人领域研究的难题[13]。
5 结束语
随着机器人行业的不断发展,传统的刚性外骨骼机器人早已不能满足人们的需求,具有质量轻、安全性好、穿戴舒适特点的柔性外骨骼机器人已成为可穿戴机器人行业的发展趋势。本文在总结刚柔性外骨骼机器人优缺点的基础上,详细介绍了涉及纺织材料的柔性外骨骼机器人国内外研究现状,总结了新型纺织材料在外骨骼机器人上的应用,最后对柔性外骨骼机器人中与纺织相关的关键技术进行综述与分析,有助于相关研究人员更加深刻地理解纺织材料在柔性外骨骼机器人研制中的重要性,未来借助纺织材料制备的柔性外骨骼机器人将具有广阔的应用前景。
猜你喜欢
军事文摘(2024年6期)2024-02-29 09:59:38
英语世界(2022年9期)2022-10-18 01:11:18
机械工业标准化与质量(2022年9期)2022-09-30 07:22:08
石油沥青(2021年5期)2021-12-02 03:21:18
小哥白尼(野生动物)(2021年12期)2021-03-29 01:15:34
文化创新比较研究(2020年7期)2021-01-13 09:10:48
高师理科学刊(2020年2期)2020-11-26 06:01:16
金桥(2020年9期)2020-10-27 01:59:44
中学生数理化(高中版.高考理化)(2020年3期)2020-05-30 12:26:32
商周刊(2017年17期)2017-09-08 13:08:58
