
支座激励下小垂度悬索动力响应试验及数值模拟
2022-11-28 11:54王国威卢文胜
工程科学与技术 2022年6期
王国威,张 鹏,卢文胜*
(1.同济大学 土木工程防灾国家重点实验室,上海 200092;2.江西理工大学 土木与测绘工程学院,江西 赣州 341000)
索网幕墙采光顶是近年来兴起的一种建筑外围护体系,因其美观轻盈、通透性能优越,被广泛应用于多功能商业中心、体育场馆和机场航站楼等大型公共设施,如北京金成大厦[1]、联想融科资讯中心[2]和德国海尔布隆车站[3]等。其中,悬索作为此类结构的基本承力单元,具有刚度低、非线性强的特点,在风、地震及环境振动等诸多不利因素作用下,有可能发生大变形和索力突变,尤其是连接于两主体结构的采光顶悬索,在强震作用下,主体结构若发生相对位移振动,悬索会发生过度张拉或松弛现象,甚至会出现断丝破坏。因此,悬索的静动力特性和动力响应研究受到广泛关注。
国内外学者对悬索的静动力特性开展了深入的研究。Irvine等[4]根据线性理论,建立小垂跨比(小于1∶8)悬索的自由振动方程,得到综合反映悬索几何形状及材性的Irvine系数。Rega等[5]进一步考虑悬索的强非线性效应,建立了弹性悬索的大振幅自由振动偏微分方程,研究其垂跨比在较大范围内的非线性现象,并指出悬索的软、硬化行为取决于自身特性和振幅。沈世钊等[6]系统地阐述了悬索的静力解析和有限元计算方法,并通过部分算例验证方法的有效性。为考虑不同边界条件的影响,刘海涛等[7]采用多尺度法研究索–梁耦合结构的非线性行为,分析得出主共振下两者刚度比较大时,索从刚度硬化转变为软化,而梁的非线性行为消失;Zhang等[8–9]对比分析端部固定和增设弹簧的悬索结构的静动力特性,计算表明,边界约束降低会导致悬索变形增加,索力降低。
在索网幕墙采光顶等实际工程中,支承悬索的主结构质量远大于索结构本身,故主结构的运动也被视为支座激励施加于悬索端部。Perkins[10]通过对悬索平面内、外耦合模态的近似描述,检验了所提出的两自由度悬索非线性振动方程的正确性。Benedettini等[11]基于连续化理论,建立支座激励下悬索的四自由度模型,并讨论了几何性质等参数对系统动力响应的影响。Guo等[12]考虑几何非线性和索–支承耦合效应建立悬索振动简化模型,并通过数值方法进行验证。此外,在索结构振动测试方面,胡俊等[13]实测了某悬索桥的风振响应,监测数据表明,日常风环境下吊索为高频涡激振动。贺文宇等[14]以两端固定的斜索为例,通过有限差分法计算索的模态参数,探究了斜拉索倾角对索力识别精度的影响。桂成中等[15]提出一种索力增量校验系数的方法,用于评定拉索和吊杆的技术状况。悬索在随机荷载下的响应研究则较少,Georgakis等[16]基于有限元法分析了斜拉索在竖向激励下的面内、外振动位移。任淑琰等[17]采用解析方法对斜拉索在轴向随机激励下的参数振动进行分析。王波等[18]研究了斜拉索在横桥向激励下面内的耦合振动特性,结果表明,在一定的横向激励下,拉索由于耦合作用其面内振动将被激发。
悬索作为采光顶的主要受力构件因支撑玻璃面板具有一定的垂度,主体结构的相对位移振动将作为支座激励导致悬索构件产生不利的变形。因此,本文主要研究支座激励下具有一定垂度悬索的动力特性和动力响应。综上,现有研究大多集中在理论分析层面,从试验角度对悬索在支座激励下的动力响应研究不足,且多数文献尚未考虑支座随机激励及垂度对悬索动力特性和响应的影响。为进一步开展支座简谐激励下悬索动力特性、响应的试验和数值分析,对比了两者结果验证数值模型的正确性,并对支座随机激励下悬索的动力响应进行了参数研究,对相邻结构间索网幕墙采光顶的设计与应用具有一定的工程参考价值。
1 支座简谐激励下悬索动力特性及响应试验
1.1 试验设计与加载
为获取悬索在支座激励下的动力特性和动力响应,在同济大学土木工程防灾国家重点实验室设计并搭建试验平台,包括试验模型、加载装置及力与位移传感器等。试件采用直径为10 mm的1×19镀锌钢绞线,跨度为7.3 m,最小破断力为69.5 kN,其中单根钢丝强度为1 320 MPa。将悬索试件一端通过耳板铰接于反力墙上,另一端同样与加载装置铰接连接,且在索上附加若干数量的配重块,由MTS作动器直接通过加载装置对悬索施加水平支座激励。
首先,建立小垂度悬索面内的无阻尼自由振动频率方程[19],其归一化后的表达式为:

式中: ωn为悬索的正对称模态频率;n为频率阶数;α=E·A/H为悬索轴向刚度与索力比,H为初始索力,E和A分 别为弹性模量和截面面积;b=w/l为悬索跨中垂度(w)与跨度(l)之比。
由表达式(1)可知, αb2可以综合考虑垂跨比、索力及材料常数对悬索振动特性的影响。因此,下文将其作为关键参数研究悬索在支座激励下的动力特性和动力响应。
为研究变形特征参数 αb2的影响,设计3组悬索试件参数( αb2= 0.04、0.08、0.19),保持跨度不变,通过调整索力及配重数改变垂跨比。悬索Ⅰ、Ⅱ等间隔布置8个配重,悬索Ⅲ等间隔布置17个配重,单个配重为24 kg,具体悬索试件参数见表1。
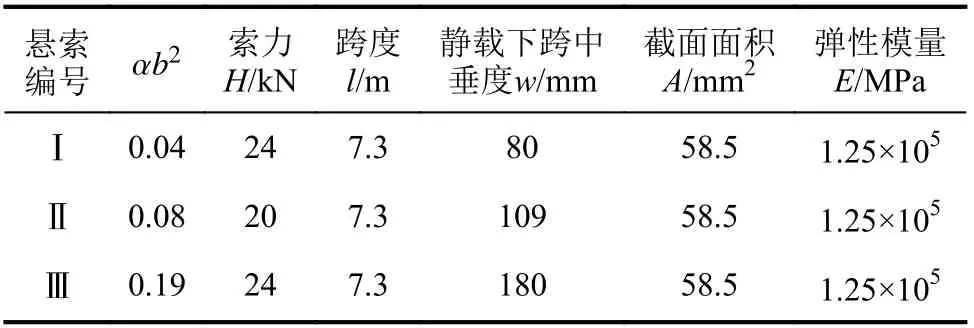
表1 悬索试件参数Tab.1 Parameters of the small-sagged cable
支座激励方式为简谐位移荷载,荷载工况分变幅值和变频率加载,考虑MTS作动器的加载能力,两组加载工况列于表2。试验的整个加载过程为:首先,通过悬索端部张紧装置施加1 kN的初始拉力,固定限位构件以防止安装配重过程中悬索发生松弛;其次,释放限位约束,检查各传感器及采集仪工作状态,并通过作动器控制索力在预定值附近;最后,采用正弦波位移激励:Xd(t)=Dsin(2πft),使MTS作动器连续往复加载30周,两组工况的总加载时间t分别为25和60 s,加载完毕后让悬索自由振动,直至振动停止,测量悬索的频率和阻尼比。
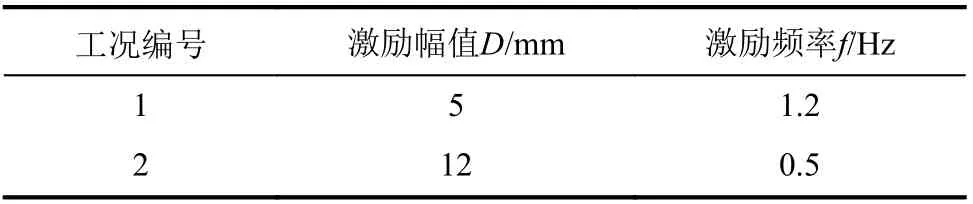
表2 试验加载工况Tab.2 Cases of the testing
试验采用力传感器和位移计2种传感器。在悬索两端分别安装一个量程为5 t的力传感器,实时量测索力大小;在悬索跨度的1/3、1/2和2/3位置处各布置一个量程为750 mm的位移计,用来测量悬索面内的竖向动位移;力传感器和位移计的采样频率均设定为50 Hz,并通过数据采集仪记录各传感器数据。在悬索下方搭设防护架以防止配重块坠落损坏试验设备,试验测点及装置示意图和加载装置现场照片如图1、2所示。

图1 试验测点及装置示意图Fig.1 Schematic diagram of test measuring points and device

图2 悬索试验装置Fig.2 Testing setup of the small-sagged cable specimen
1.2 试验结果与分析
1.2.1 悬索动力特性
图3为各悬索在自由振动阶段由位移计实测数据计算所得的基频,从图3中可以看出:随着 αb2的增加,悬索基频 ω1从2.07 Hz降低至1.90 Hz。在边界条件相同的情况下,悬索的刚度随垂跨比的增加而降低。在支座简谐激励完毕后,以悬索Ⅰ ( αb2= 0.04)和悬索Ⅲ( αb2= 0.19)为例,提取跨中自由振动曲线并计算悬索等效黏滞阻尼比ξ[20],自由衰减法计算公式如下:

图3 不同 α b2下 悬索的基频ω1Fig.3 Base frequencies of the small-sagged cable with differentαb2

式中,vr和vr+s分别为r和r+s时刻出现的相邻正波峰。
图4为悬索的自由振动曲线,随着变形特征参数αb2的增加,自由振动曲线的指数分布规律特征逐渐明显,通过指数拟合得到悬索Ⅰ与Ⅲ的阻尼比分别为1.2%、0.8%。
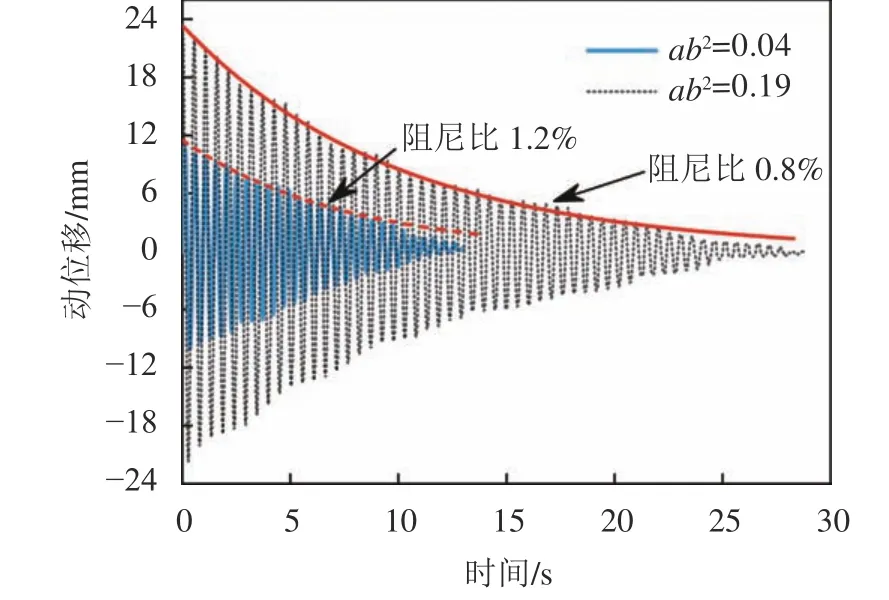
图4 悬索Ⅰ、Ⅲ的自由振动曲线Fig.4 Free vibration of the small-sagged Cable Ⅰ and Ⅲ
1.2.2 悬索动力响应
以悬索跨度1/2位置处为例,选取悬索Ⅰ和Ⅲ为研究对象,分析 αb2对支座激励下悬索动力响应及动力特性的影响,获得动力响应时程曲线,如图5所示。为便于对照,工况1和2均截取前25 s的时程曲线。由图5(a)可知:在工况1支座激励下,悬索面内动位移幅值 j∆wmaxj随 αb2的增加而增大, j ∆wmaxj增加27.7 %。相反地,动索力幅值 j∆Hmaxj随 αb2的增加而明显减小,j∆Hmaxj降 低69.1 %;当 αb2= 0.19时,除0 ~ 5 s时间段内的索力变化较大外,5 ~ 25 s时间段内, j∆Hmaxj均在1.5 kN附近波动,分析主要原因是:悬索的初始垂度较大,施加相同的支座激励,索力变化较小。由图5(b)可知,在工况2支座激励下,面内 j∆wmaxj和j∆Hmaxj的变化也表现出相同的规律,动位移幅值略有增大,但 j ∆Hmaxj降低29.4 %。
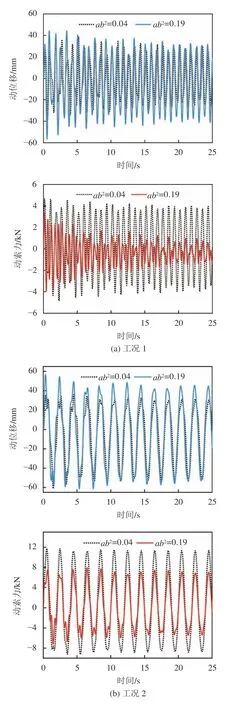
图5 不同α b2下悬索动力响应时程曲线Fig.5 Dynamic response curves of the small-sagged cable with differentαb2
2 数值模拟
2.1 数值模型建立
采用ANSYS软件建立悬索数值模型,模型尺寸(l×A)、配重块数目及弹性模量E均与试验构件相同,泊松比µ=0.3,密度取钢材材料密度ρ=7 800 kg/m3。悬索截面较小,忽略自身抗弯刚度对面内振动的影响,采用Link 10仅受拉单元模拟,通过初位移 ∆L施加初始索力,配重块采用Mass 21结构质量单元模拟,不考虑转动惯量效应。悬索模型一端(A端)为铰接约束,另一端(B端)释放X方向约束,由于主要研究悬索面内(X、Y向)的振动,故同时约束索体Z向平动位移。采用绝对位移加载,在支座位置处施加与试验相同的正弦波位移激励Xd(t),计算模型如图6所示。
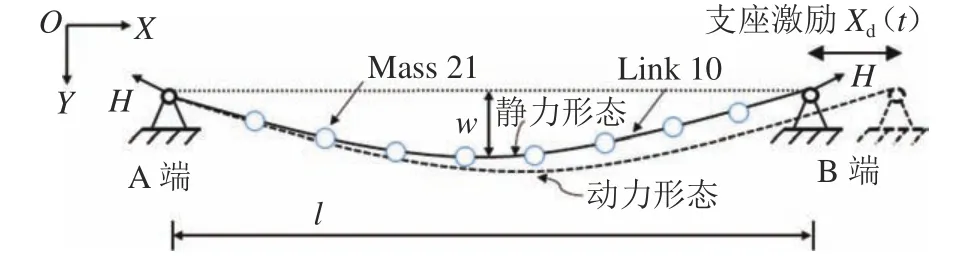
图6 支座激励下悬索振动计算模型Fig.6 Computing model of a small-sagged cable under support excitations
具体建模过程如下:
1)根据试验构件建立几何模型,定义并赋予各部分材料属性,将模型划分为50个单元,并施加初始索力及设置模型边界条件。
2)进行悬索静力计算,打开“NLGEOM”命令,考虑重力和几何非线性影响,对悬索进行找形分析,获得静载下悬索 αb2的试验和有限元对比值。
3)修正模型坐标,定义计算和扩展模态数,计算悬索的1阶频率,并与试验实测结果对比。
4)采用完全法瞬态动力分析,假定各阶模态阻尼比相同,将实测阻尼比 ξ转化为Rayleigh阻尼,并通过命令“ALPHAD”和“BETAD”定义阻尼系数;时间步长 ∆t=0.05 s,采用水平支座简谐激励进行模拟试验加载;最后,提取悬索响应结果曲线并与试验结果对比分析。
2.2 数值模拟与试验结果对比验证
表3给出了3组悬索试件静载下索力H、挠度b、αb2及1阶频率的对比结果。由表3可知,有限元计算结果与试验结果非常接近,对于悬索Ⅰ、Ⅱ和Ⅲ,各参数误差均在5%~12%以内。
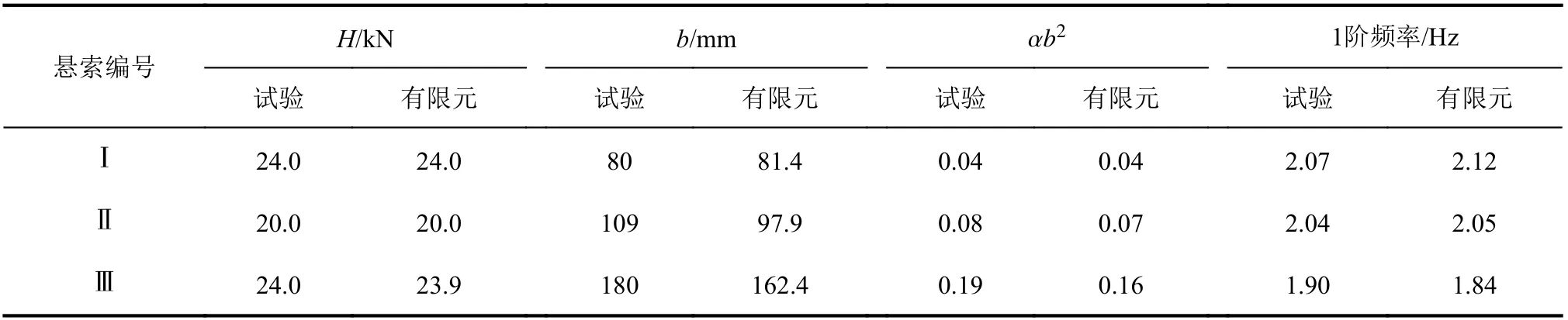
表3 静力及频率计算对比结果Tab.3 Comparison results of static and frequency calculation
以悬索Ⅱ跨度1/2位置为例,图7给出了工况1和2下动力响应试验结果和数值模拟结果的对比,由图7可知:1)悬索Ⅱ在工况1下的动位移幅值 j∆wmaxj和索力幅值 j∆Hmaxj变 化较工况2更为明显, j∆wmaxj和 j∆Hmaxj分别为44.37 mm和4.02 kN,数值模拟和试验结果在部分峰值处略有差异,但平均索力和平均位移变化幅值误差均在12 %以内,主要原因是:在高频的支座激励下,悬索上的配重块刚心与质心不完全重合,配重发生少量偏转,对刚度有一定的影响,从而导致计算与试验存在误差,但两者结果的幅值变化趋势和相位均保持同步。2)相比于工况1,工况2的位移和索力变化相对平稳,且数值模拟和试验结果吻合较好,数值模拟和试验的 j ∆wmaxj、 j ∆Hmaxj的误差分别为5.4%、6.8%。综合上述结果可知,悬索动力特性及响应试验结果与数值模拟结果均吻合较好,验证了有限元模型的准确性。
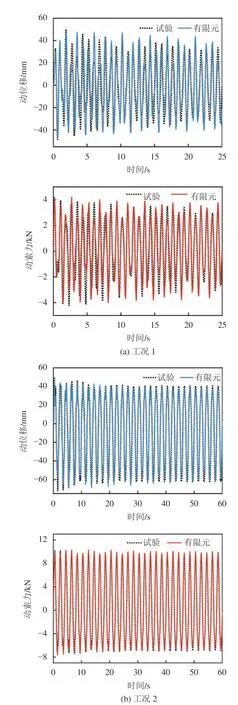
图7 悬索Ⅱ(= 0.08)试验结果与数值模拟结果对比Fig.7 Comparison of test results and numerical simulations results for Cable Ⅱ(α b2 = 0.08)
在前文验证有限元建模方法正确的前提下,以悬索Ⅰ( αb2=0.04)的有限元模型为例,令支座简谐激励频率f=2.07 Hz,研究不同阻尼比 ξ下悬索的1阶共振响应,总加载时间为15 s,获得共振响应时程曲线如图8所示。从图8可以看出:当阻尼比 ξ=0.01时,动位移和动索力呈周期性的“震荡”变化,但其幅值 j∆wmaxj和 j∆Hmaxj总体呈下降的趋势;当阻尼比 ξ= 0.20时,位移和索力变化均呈现平稳变化,j∆wmaxj、 j∆Hmaxj分别稳定在20 mm、4 kN附近。值得注意的是,随着阻尼比的增加,悬索1阶共振下位移和索力的响应均受到不同程度的控制,位移控制较索力下降明显, j∆wmaxj降 低64.0 %, j∆Hmaxj降低33.2 %。从侧面反映出,若在工程中的索网采光顶悬索端部或连接件部位布置黏滞、黏弹或摩擦阻尼器等装置,将会有效地降低悬索的位移和索力响应。
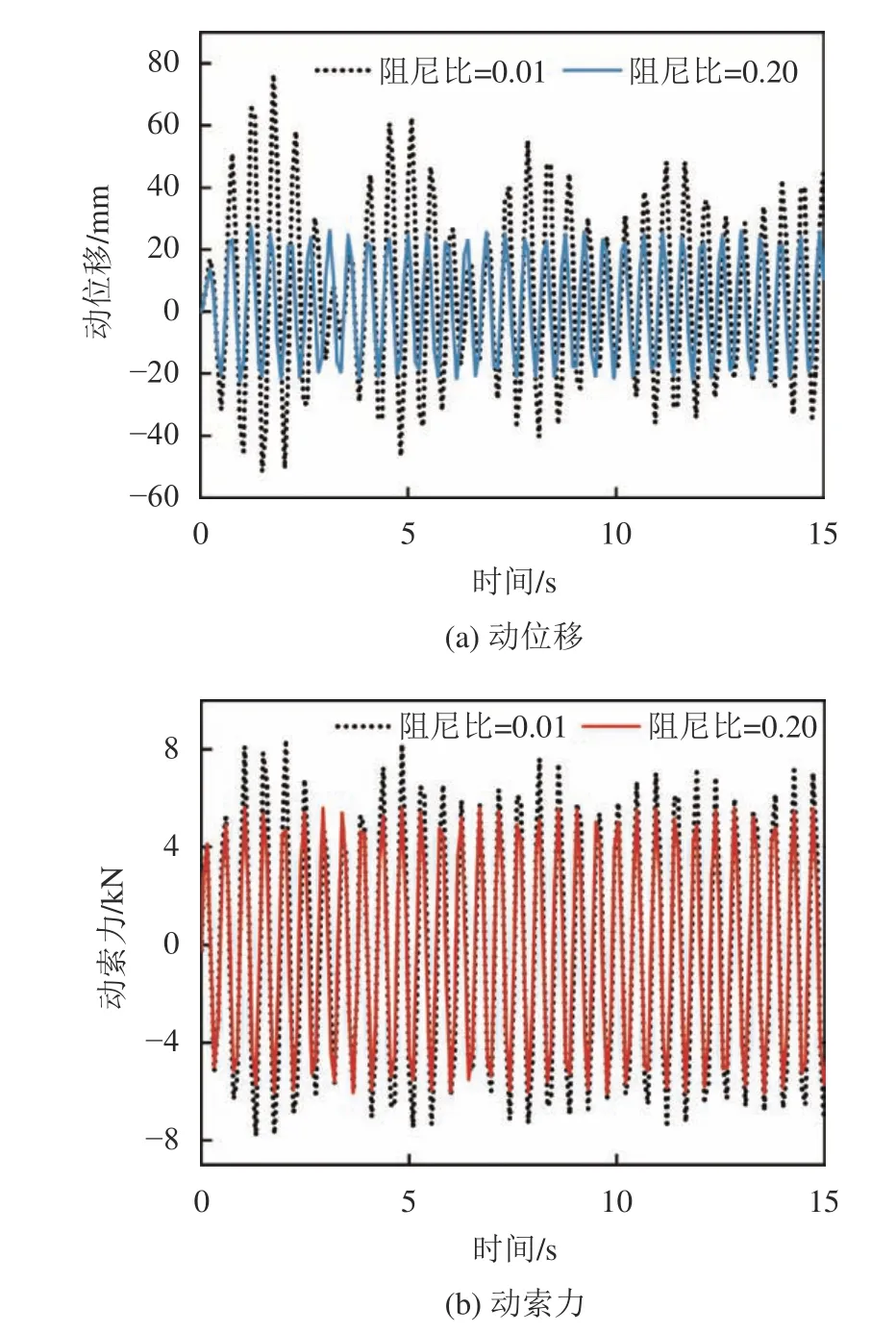
图8 不同阻尼比 ξ下悬索1阶共振响应时程曲线(α b2=0.04)Fig.8 First-order resonance responses of the small-sagged cable with different ξ (α b2=0.04)
3 支座随机激励下悬索动力响应分析
风、地震及环境振动等属于非确定性作用,均具有一定的随机性,因此,研究悬索在随机激励下的动力响应具有重要的现实意义。为讨论悬索在支座随机激励下的动力响应,在前文工作的基础上,以理想高斯白噪声模拟随机环境激励,分析悬索控制参数 αb2、阻尼比 ξ和激励强度S0对悬索随机动力响应的影响。
基于有限元法将悬索离散,对于阻尼较小的悬索结构,由振型j产生的响应与振型k的响应近似满足统计独立[6],则位移响应谱密度Sui(ω)可表示为:
式中,SF j(ω)为 激励的谱密度函数, ω为激励圆频率,ωj为 悬索第j振型圆频率, ϕij为第i自由度的第j振型值,J为振型总数,为传递函数的模。对式(3)进行积分求和,可得位移响应均方差:

随机激励下悬索第e个单元的索力响应 ∆Te为:


采用均值为0、激励强度为S0的理想高斯白噪声D(t)作为支座水平激励,其自相关函数可表示为:E[D(t)D(t+τ)]=2πS0δ(τ), 其中, δ (τ)为Dirac–δ函数,τ为时间间隔,E[·]为 [·]的期望。以试验中悬索Ⅰ的几何和材料参数为例,在ANSYS中建立支座随机激励下悬索的数值模型,并进行随机振动计算(PSD功率谱密度分析)。主要建模过程如下:
1)悬索几何建模、单元类型、单元划分及边界约束与简谐激励相同,将初始索力H直接施加在释放X方向自由度的索端支座处。
2)静力计算完毕后,定义计算模态和扩展模态,同时令“ELCALC = YES”计算应力结果。
3)采用位移谱作为水平支座激励,由于软件输入的要求,将双边谱转换为单边谱进行加载,定义计算频率范围为0.1~10.0 Hz,激励强度S0为0.01~0.20 m2/(rad·s−1)。
4)在PSD分析过程中,支座激励的缩放系数取为1,采用自动时间步,阻尼比 ξ通过命令“DMPRAT”施加,采用“PSDCOM”命令计算悬索位移及索力响应的均方差(1σ),即位于–1σ~1σ区间发生概率为68.3 %的结果量。
3.1 参数 αb2对悬索位移及索力响应的影响
首先,研究参数 αb2对支座随机激励下悬索动力响应的影响,计算不同 αb2下的悬索位移和索力响应,结果如图9所示。
图9(a)、(b)为3组 αb2的悬索跨中1/2位置处的位移、索力响应谱,可以发现,两者结果符合正态分布。由于 αb2与结构特性直接相关,随着 αb2的增加,悬索动力响应谱幅值出现左移,说明结构频率逐渐降低,这也与图3中试验的实测结果相一致。在相同的激励强度S0和阻尼比 ξ下,悬索动力响应随 αb2的增加而显著加大,位移响应谱幅值增加了3倍,索力响应谱幅值甚至增加了20倍。图9(c)为悬索响应的均方差与 αb2的 关系,可知: αb2从0.04增加至1.0的过程中,位移和索力的均方差呈上升趋势,但增加的幅度随 αb2的增加而逐渐降低;当 αb2= 1.0时,悬索的位移均方差为0.339 m,增加了3.3倍,索力均方差为2.1 kN,增加了3.17倍。该规律反映出 αb2较大的悬索,其位移和索力响应对支座的随机激励更加敏感。
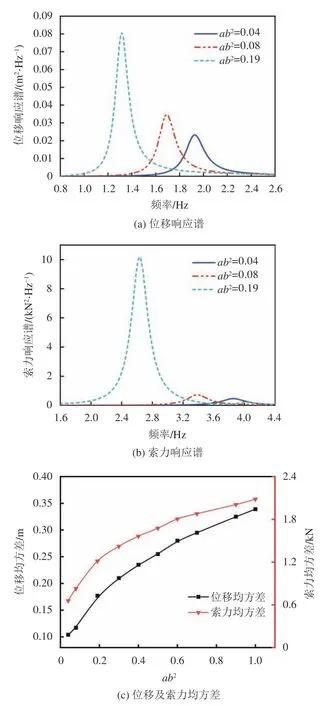
图9 不同α b2下 悬索的位移、索力响应(S0=0.01, ξ=0.05)Fig.9 Responses of the small-sagged cable with different αb2 (S0=0.01, ξ=0.05)
3.2 阻尼比ξ 对悬索位移及索力响应的影响
取不同的悬索阻尼比ξ,分析其对悬索位移及索力响应的影响。不同ξ 下悬索的动力响应谱如图10(a)、(b)所示,可知:当ξ=0.01时,位移和索力响应谱幅值最大,分别为0.58 m2/Hz和11.55 kN2/Hz;当 ξ=0.05时,位移和索力响应谱幅值已降低至0.02 m2/Hz和0.47 kN2/Hz。对比两组结果,可以发现,悬索位移和索力响应已被显著抑制。从图10(c)悬索响应的均方差曲线也能看出,位移和索力均方差随着阻尼比ξ的增加而降低,当ξ= 0.20时,两者分别减小68.1 %和75.3 %;另外,两者曲线下降趋势逐渐变缓,表明当ξ<0.10时,位移和索力响应对阻尼比的变化敏感性较高,增加 ξ带来的抑制效果显著。上述规律与支座简谐激励下悬索1阶共振响应随阻尼比 ξ的变化相同,也进一步说明增加悬索系统阻尼将明显降低位移和索力响应。
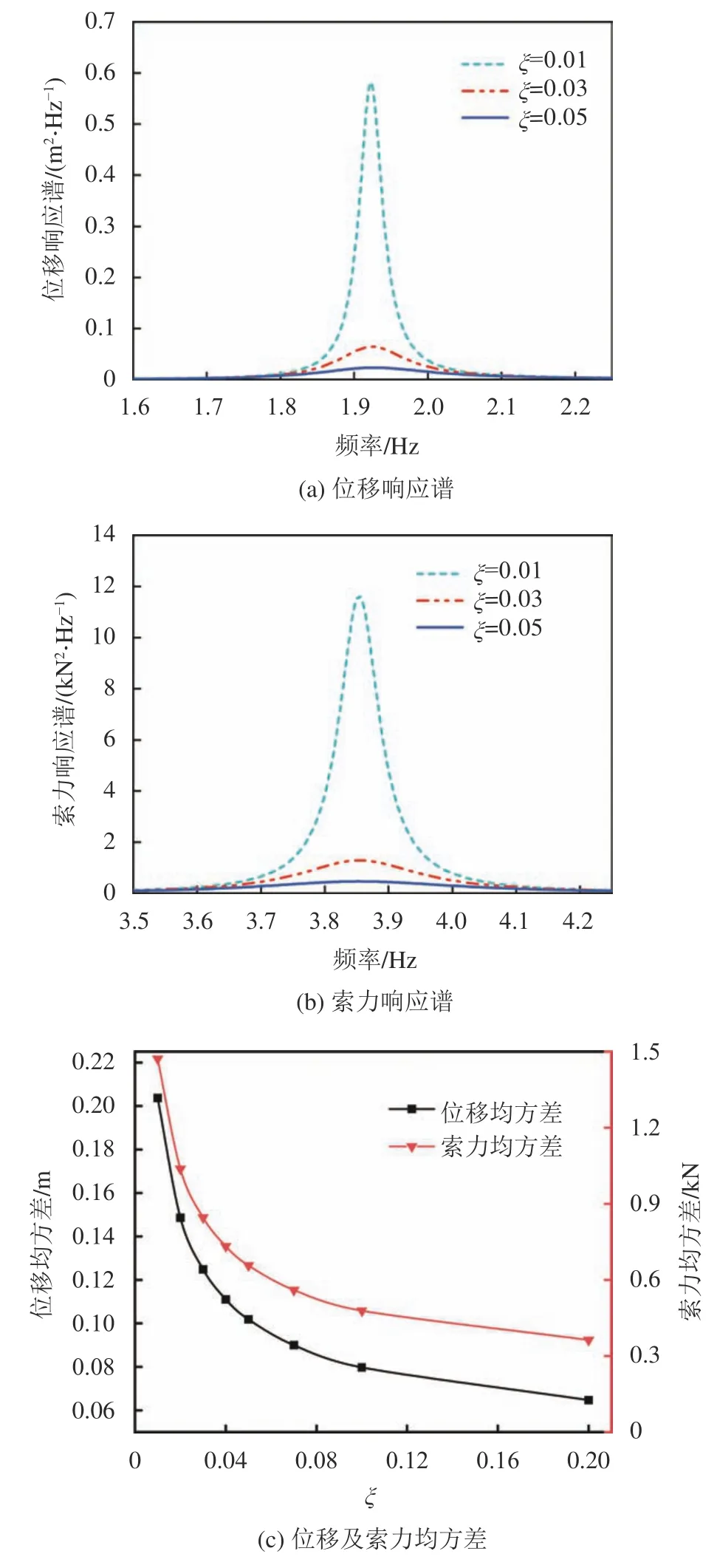
图10 不同 ξ下悬索的位移、索力响应(S0=0.01, α b2=0.04)Fig.10 Responses of the small-sagged cable with different ξ (S0=0.01, α b2=0.04)
3.3 激励强度S0对悬索位移及索力响应的影响
若支座所受的随机环境激励强度S0发生改变,系统的动力响应也将随之变化。计算不同激励强度S0下的悬索动力响应,如图11所示。
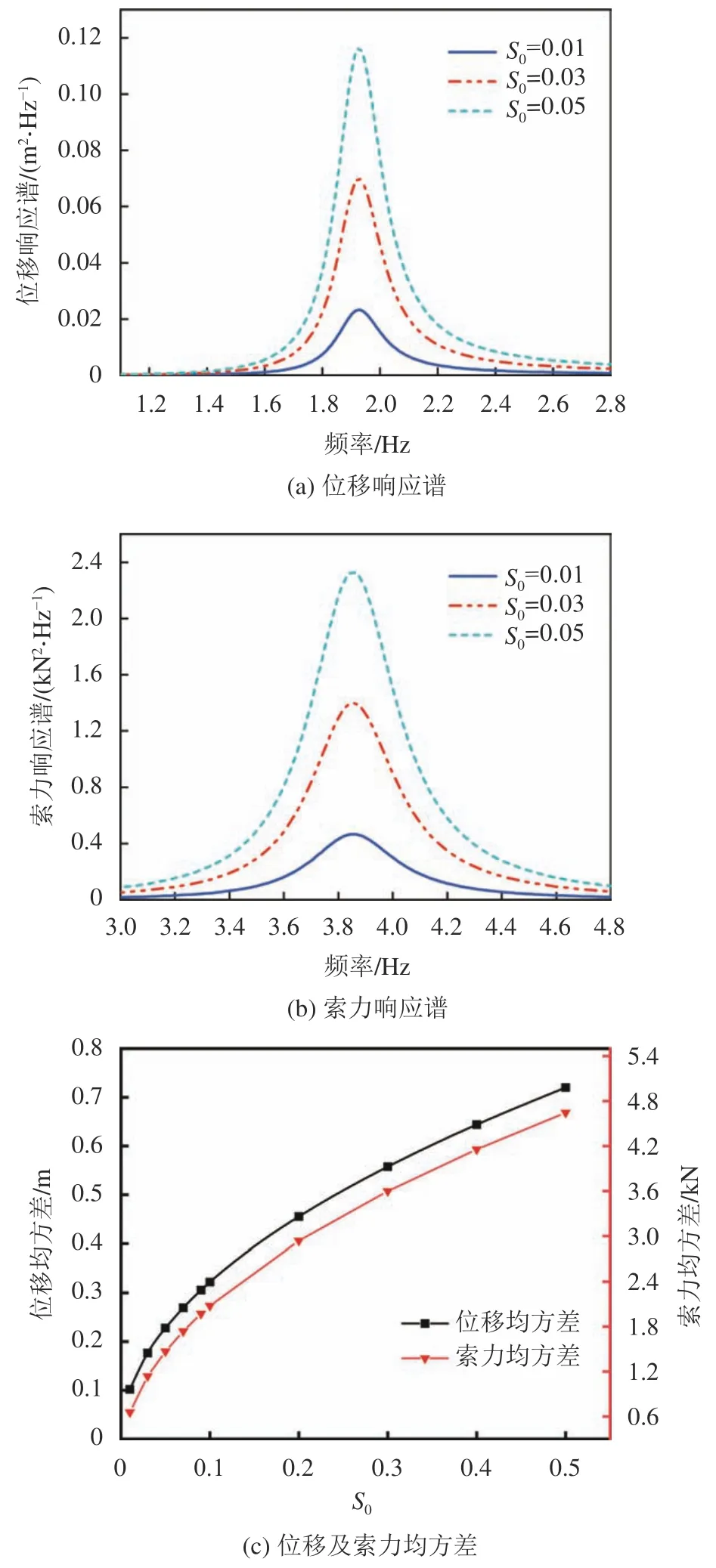
图11 不同S0下悬索的位移、索力响应( ξ =0.05, α b2=0.04)Fig.11 Responses of the small-sagged cable with different S0 ( ξ =0.05, α b2=0.04)
图11表 明,在 相 同 的 αb2和 阻 尼 比 ξ 下,、及位移、索力均方差均随S0的增加而增大;对应的增加了7.1倍,增加了6.9倍,响应均方差曲线斜率逐渐减小,但总体呈上升趋势。
4 结 论
本文首先进行了悬索在支座简谐激励下动力特性及响应的试验和数值模拟研究,对比两者结果验证模型的正确性;其次,通过数值方法计算悬索在支座随机荷载激励下的动力响应,并分析响应谱及均方差随 αb2、 阻尼比 ξ和激励强度S0关键参数的变化规律,得到的主要结论如下:
1)设计并开展悬索在支座简谐激励下的动力响应试验,分析不同 αb2下悬索动力响应的变化:在两组工况下,悬索动位移随 αb2的增加而小幅增加;相反地,动索力随 αb2的增加而明显增大。结果表明,相同的支座简谐激励下,相比于位移响应,索力响应对悬索的关键参数 αb2更加敏感。
2)建立悬索试件有限元模型,模型结果与悬索自由振动试验实测频率、静载下实测垂跨比及各工况下悬索试件动力响应试验结果吻合较好,从而验证了有限元模型的正确性。
3)对支座简谐激励下悬索的1阶共振响应进行有限元计算,结果表明,悬索动位移受阻尼比 ξ的影响更大,且时程响应变化平稳。
4)在支座随机激励下,通过数值方法讨论了 αb2、ξ和S0对悬索位移及索力响应的影响。计算表明,两种响应谱值和均方差均随参数 αb2、激励强度S0的增加而增大,随阻尼比 ξ的增加而减小,且变化幅度逐渐降低,说明3种参数对悬索动力响应的影响会逐步减弱。
猜你喜欢
工业安全与环保(2022年3期)2022-03-21
能源研究与利用(2022年1期)2022-03-03
科学技术与工程(2022年5期)2022-02-28
铁道建筑(2021年9期)2021-10-14
地震研究(2021年1期)2021-04-13
建材与装饰(2020年12期)2020-05-11
建材发展导向(2019年10期)2019-08-24
城市道桥与防洪(2019年5期)2019-06-26
振动与冲击(2019年4期)2019-02-22
中国塑料(2015年11期)2015-10-14
