
平面交叉口右转车与行人时空布局优化研究
2022-11-24 06:47鲍志强邬岚翟伟
森林工程 2022年6期
鲍志强邬岚翟伟
(南京林业大学 汽车与交通工程学院,南京 210037)
0 引言
城市交叉口作为城市道路网中重要组成部分,其交通运行状况复杂。崔鑫等[1]通过分析交叉口过街行人的穿越特性和交通行为,在元胞自动机基础上引入社会力模型,解决了行人障碍物之间的碰撞与震荡现象及行人重叠穿透现象。目前大部分城市交叉口存在大量的行人过街,导致右转车辆与行人的冲突现象比较明显,行人与右转车辆在交互过程中往往处于劣势地位,容易造成交叉口运行效率降低。大部分交叉口采用红灯允许右转(RTOR),已有研究表明,RTOR模式下的冲突要比允许右转相位(PPRT)模式下的冲突更严重,PPRT模式更适用于降低右转车与行人的冲突、提高通过效率,RTOR模式在十字交叉口处更有可能让位于PPRT模式[2-4],但目前而言RTOR还是被广泛使用于普通非渠化右转车道。
国外对于人车冲突特性研究相对较多,大多集中在时间上,针对车辆避让距离和让行交通标志的研究涉猎较少。Koh等[5]基于行人违章概率模型,发现红灯允许右转下右转车流量、行人过街距离等对行人违法过街存在严重影响;Ahmed等[6]通过收集当地数据进行分析,发现车道数、车道宽度和行人冲突对右转驾驶员的驾驶行为存在严重影响;Kaparias等[7]基于冲突时间和冲突距离等评价指标,对右转车与行人的冲突严重性进行判别,发现2个指标可以有效地反映右转车与行人的冲突严重程度,并发现右转车距人行横道距离、驾驶员反应时间是影响冲突的重要因素;Retting 等[8]研究2种限制 RTOR的警告标志对行人过街安全性的影响,发现当标志存在时,驾驶员与行人的冲突次数大大减少。
国内也多是从延误、冲突指标等方面研究人车冲突。孙重静[9]基于人车冲突指标研究,提出行人与右转车冲突风险定量评估的新方法;鲍怡婷[10]通过对右转车与行人的交互过程进行分析,划分了右转车与行人的冲突方式,对冲突严重性进行研究,建立了右转车通行仿真模型,并基于实地数据调查验证了该模型的有效性;刘晓辰[11]在观测右转车与行人交互过程的基础上,发现右转车与行人发生冲突时存在3种穿越方式,并确定了红灯禁止右转的设置条件为行人延误超过15 s;李玲[12]对右转车与过街行人的冲突进行分析,确定右转车抢行概率模型,得到过街行人等概率分布时的信号交叉口右转车辆穿越过街行人流的延误模型;马艳丽等[13]结合车辆行人相对位置、速度、加速度和车辆尺寸等信息,构建了过街行人与车辆冲突识别模型,提出了基于人-车间距的交通环境能见度测量方法。
本文主要从时间和空间2个角度出发对右转车与行人的冲突进行研究,时间依旧采用冲突指标作为评价2种模式下冲突的标准,空间主要采用让行标志的位置部署选择为主。
1 右转车辆与行人冲突特性分析
1.1 车辆右转行为方式划分
右转车辆在交叉口处的行为包括减速、停车与抢行,右转车辆一般采取以下方式进行右转:减速让行、停车让行和抢行穿越。考虑到不同交叉口是否设有右转专用道,将右转车行为影响因素进行区分:在设有RTOR(红灯允许右转)的情况下,右转专用道存在不确定性,因此假设此类的信号控制存在右转专用道,右转车辆则会受到行驶速度、可穿越间隙和信号相位等影响;在设有PPRT(允许右转相位)的情况下,一般存在右转专用道,右转车辆也会受到车辆变道、右转信号周期等影响。因此将车辆右转行为方式划分为:连续穿越、间断穿越和停车让行,如图1和表1所示。

图1 车辆右转行为方式Fig.1 Right-turn behavior of vehicles
1.2 行人过街行为方式划分
行人的基本行为可以分为:前进、后退、等待、加速、减速和侧移等,行人一般采取以下方式通过人行横道:适时过街、等候过街和抢行过街。基于行人的过街方式一般会受到通行方式、过街速度、过街位置、过街相位周期以及过街方向等影响,因此将行人过街行为方式进行划分:连续过街、间断过街和等候过街。如图2和表2所示[14]。
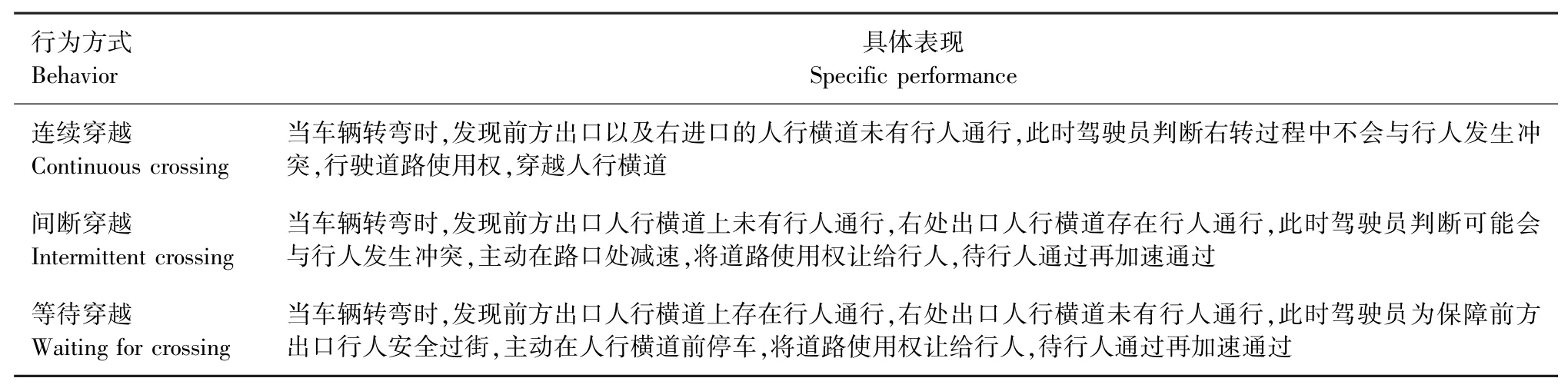
表1 车辆右转行为方式具体表现Tab.1 Specific performance of right-turning behavior mode of vehicles

图2 行人过街行为方式Fig.2 Pedestrian crossing behavior
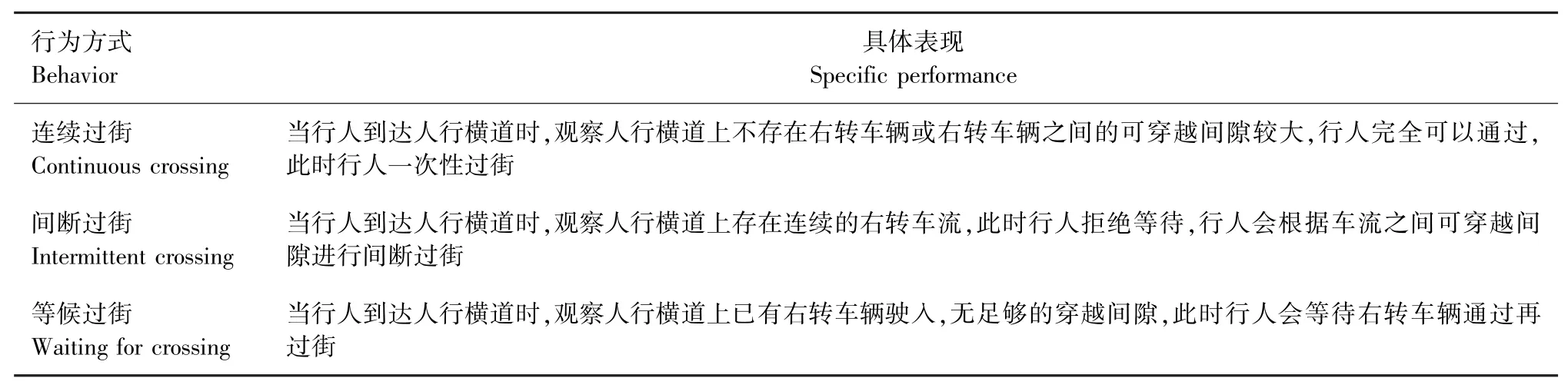
表2 行人过街行为方式具体表现Tab.2 Specific performance of pedestrian crossing behavior
1.3 右转车辆与行人冲突运行状态分析
通过对车辆右转行为和行人过街方式的划分,分析右转车与行人冲突的运行状态,对南京市6个交 叉 口 工 作 日 的7:30—8:30、9:30—10:30、17:30—18:30这3个时段进行现场调查和拍摄,记录行人过街步速、过街时间以及右转车速度等。对车辆右转行为(车辆类型以小汽车为主)和行人过街方式的数据进行分析,得出右转车辆与行人过街在冲突过程中的速度变化情况,并分别选择5 组数据,绘制图,如图3所示。
由图3可以发现,在连续过街情况下,行人速度加减情况没有明显规律,大部分行人在人行横道中段速度较高,两侧速度较低;等待过街情况下,行人过街速度由0增加,最终趋于稳定;间断过街情况下,行人的过街速度先迅速增加,待完全通过人行横道后,再减速回正常状态。连续穿越情况下,右转车车速仅在转弯时有所下降,待转弯结束时,再加速离开;等待穿越情况下,右转车车速降幅较大,右转车速度在某一时刻为0,待行人过街后,车辆加速离开;间断穿越情况下,右转车车速降幅较大,但未受到很大阻碍,待行人过街后,再加速离开。
考虑到右转车辆与行人过街具体表现速度的不同,分别从时间和空间的角度分析右转车辆与行人之间的冲突。
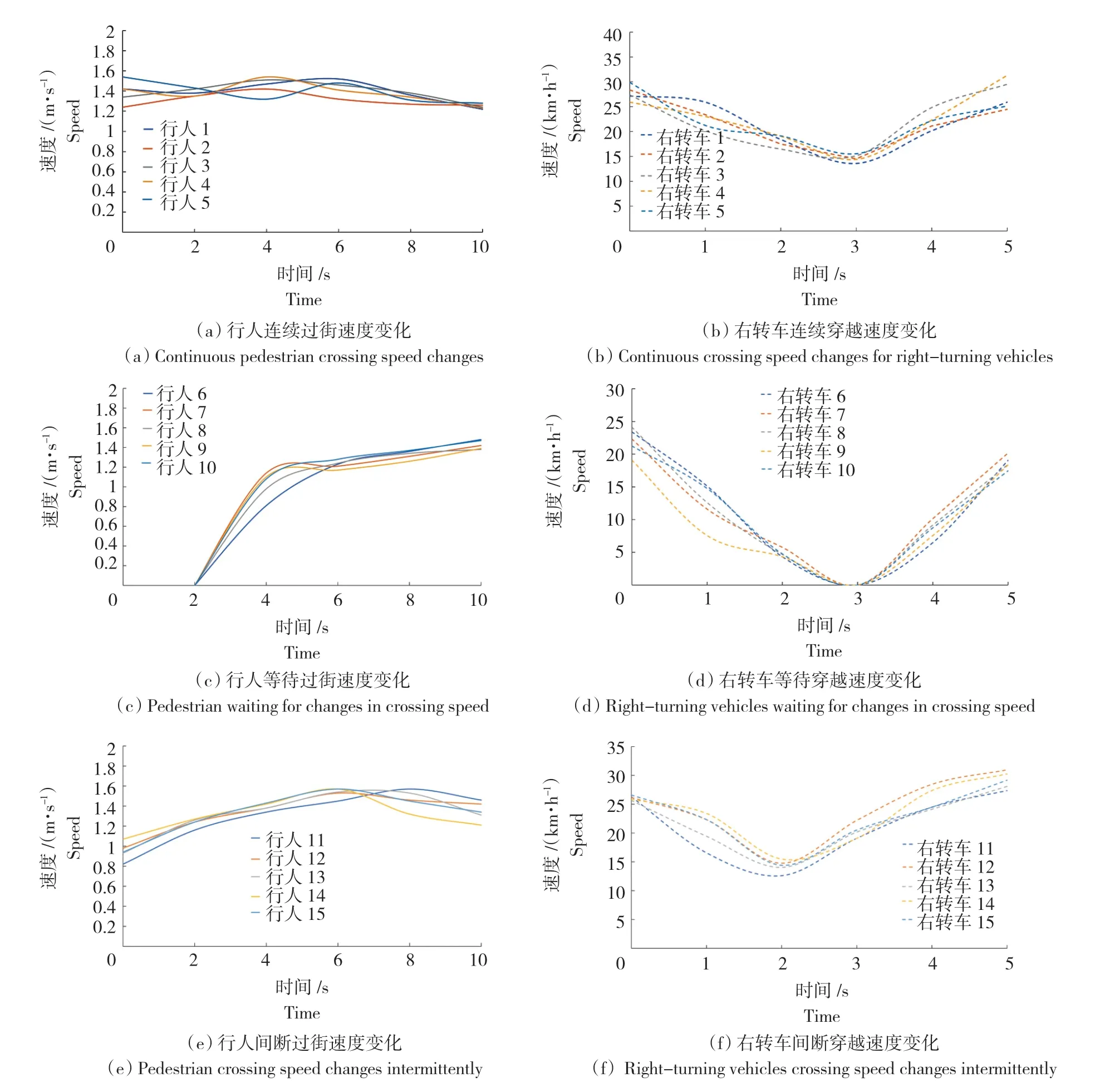
图3 行人与右转车过街速度变化Fig.3 Pedestrian and right turn vehicles crossing speed changes
1.3.1 时间分离-右转车流信号设置(1)设有RTOR(红灯允许右转)
右转车与行人的冲突是影响交叉口运行效率的重要因素,在允许RTOR的信号交叉口,不管采用二相位还是四相位,右转车与不同方向的行人都会发生冲突。图4便是右转机动车与行人可能发生的冲突区域,根据人行横道的位置可以进一步对冲突进行归类。
由图4可以发现,机动车进入交叉口与行人之间的冲突可以归纳为Ⅰ类冲突,离开交叉口与行人的冲突归纳为O类冲突。
(2)设有PPRT(允许右转相位)
在允许PPRT的信号交叉口,采用二相位和四相位,机动车与行人只可能在离开交叉口的人行横道上发生冲突,如图5所示。
由图5可以看出,在交叉口处设置右转相位以后,二相位与四相位的右转车与行人之间的冲突基本发生在离开交叉口的位置,可将其都归纳为O类冲突。但就发生的冲突面积而言,二相位的冲突面积要大于四相位[15]。
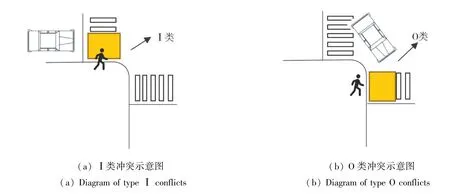
图4 RTOR模式下右转车与行人冲突区域Fig.4 Conflict area between right-turning vehicles and pedestrians in RTOR mode

图5 PPRT下右转车与行人冲突区域Fig.5 Conflict area between right-turning vehicles and pedestrians in PPRT mode
1.3.2 空间分离-设施布局规划
(1)让行标志位置与交通岛设置(不完全分离)
通过增设交通岛,可以让右转车辆提前右转,减少右转车辆在交叉口处与行人发生冲突,但并没有实现与行人完全分离;通过确定让行标志的不同位置,可以让驾驶员提前采取减速措施,为不完全分离提供保障措施。
(2)立体过街设施设置(完全分离)
采用立体过街设施,比如地下通道或人行天桥,可以从空间上彻底分离人车,消除冲突。但此方法只适用于交叉口范围较大,范围较小的交叉口采用不完全分离更合适[16]。
2 右转车辆与行人时空布局模型
2.1 右转车辆与行人时间冲突概率模型
(1)设有RTOR情况下的冲突概率
假设P(1)为右转车根据行人间隙采取间断穿越的概率;P(2)为右转车采取等待让行的概率;P(3)为右转车接受行人间隙采取连续穿越的概率。若行人过街服从泊松分布,行人过街的时间间隔服从负指数分布,可接受穿越间隙出现的概率表示为

式中:f(t)为可接受不同穿越间隙t的概率;λ为到达率。
一般右转车采取间断穿越会与行人发生冲突,间隔会小于临界时间Δt,则右转车采取间断穿越的概率为

式中:Δt为临界冲突时间;λp为行人的到达率。
若右转车采取停车让行,则右转车不可接受穿越间隙的概率

式中:t1为t<Δt的穿越间隙;λc为行人的到达率。
则右转车接受行人间隙发生冲突的概率:

结合上式,可以得出设有RTOR情况下的冲突概率

式中,P为右转车与行人发生冲突的概率。
(2)设有PPRT情况下的冲突概率
PPRT与RTOR不同,采取PPRT的交叉口右转车与同进口道的行人从时间上分离,不存在冲突;与出口道的行人会产生类似RTOR的冲突。对比于二相位和四相位,设有PPRT四相位的冲突概率与RTOR相同,二相位的冲突区域较大,其中还包括右转与左转车的合流冲突概率

式中,λl和λr分别表示左转和右转车流的到达率。
结合设有RTOR情况下的冲突概率,得出设有PPRT情况下的冲突概率

进一步分析,采取RTOR和PPRT的交叉口,在行人绿灯亮起时,行人群体过街,右转车停车让行,不会产生冲突;当行人绿灯快结束的时候,人流不再聚集,右转车会根据合适的间隙进行穿越,容易发生交通冲突,则此时的右转车与行人的冲突数可以表示为

式中:N为右转车与行人冲突次数;C为信号周期;gi为行人绿灯时间;α为行人过街比例;PR/P为不同情况下的冲突概率。
2.2 右转车辆与行人空间布局优化模型
在交叉口处,驾驶员可以通过有效地部署让行标志来控制速度。换句话说,通过合理设置让行标志,驱动程序可以获得更多的信息效益。因此,信息效益可以作为一个量化指标[12],并结合影响指数和右转交通量对让行标志的位置进行部署,根据传统的信息效益最大化模型,对模型进行改进

式中:F为信息效益;fr为右转交通流量,qr为影响指数;zr为是否设置让行标志。
其中影响指数qr考虑车速、车道宽度和视距与事故率的关系。
(1)右转车速的影响指数
根据道路通行手册中城市道路通行能力,依据不同速度的通行能力对速度进行修正。

表3 城市道路通行能力Tab.3 Urban road traffic capacity
假设调查得到的右转车流速度保持在30 km/h,依据Iv=Q30/Qv对数据进行拟合

式中:Iv为右转车速影响指数;v为右转车速度;Qv为不同速度通行能力。
(2)车道宽度的影响指数
一般车道越宽,车辆行驶速度越快。车道宽度的大小对通行能力具有一定的影响,此研究车道宽度取3.5 m,则车道宽度的影响指数公式为

式中:Ih为车道宽度的影响指数;h为右转专用道的宽度。
(3)视距的影响指数
以90°作为交叉衡量角度,考察不同交叉角度与车辆行驶距离的关系,依据Id=S90/Sσ对数据进行拟合

式中:Id为视距的影响指数;α为交叉口角度;Sσ为不同角度右转车行驶距离。

结合上式,信息效益最大化模型可以表示为
3 模型的验证
3.1 右转车与行人时间冲突指标分析
为探究2种情况下右转车与行人的冲突情况,基于南京市交叉口右转交通量和行人过街流量调查,利用Vissim对右转车与行人进行仿真,设置行人过街服从泊松分布,行人过街的时间间隔服从负指数分布,将仿真结果导入SSAM模型当中得出右转车与行人冲突分析指标。SSAM 主要采用的冲突分析指标有: 冲突时间( Time to Conflict,TTC) 、遭遇时间( Position Encroachment Time,PET) 、初始减速度(DR) 、最大速度(MaxS) 和相对速度(DeltaS)。本文主要采取TTC和PET[17]。
表4 2种模式下右转车与行人冲突Tab.4 Conflicts between right turns and pedestrians in two modes
由表4可知,PPRT情况下的右转车与行人冲突要优于RTOR情况下的冲突,这是由于PPRT的冲突区域只存在O类冲突,而RTOR的冲突区域包含Ⅰ类和O类2种,在没有右转信号相位的情况下,右转车会随时采取右转措施,右转车在右转的过程中会经历2个人行横道:出口道和进口道。不论是出口道还是进口道采取行人放行,都有可能会与不受相位控制的右转车发生冲突。
3.2 让行标志的空间部署
在空间分离部分可以采用遗传算法求解信息效益最大化模型,模型优化的主要对象是让行标志,在遗传算法的设计中,适应度可以代表目标函数值,适应度越大,信息效益越明显,让行标志的位置则最佳[18]。
由图6可知,遗传算法通过采用浮点运算代替定点运算,定义染色体的长度替代让行标志的位置,将目标函数作为适应度来处理,基于种群收敛速度对其进行随机初始化处理,操作过程采用2点交叉实现交叉操作,以一定概率选择交叉点,交换一组染色体基因,最后产生结果。
建立交叉口模拟道路网络,显示让行标志的部署情况,选择6个位置作为让行标志的备选地点,每个标志之间的间隔为25 m为研究对象,假设右转车辆前方人行横道有行人过街,如图7所示。

图6 遗传算法流程图Fig.6 Flow chart of genetic algorithm
图7 空间模拟网络Fig.7 Spatial simulation network
由表5结果表明,空间不分离的交叉口解码的染色体结果是[110001],这意味着选择位置1、2、6可以作为让行标志的部署位置;空间不完全分离的交叉口解码的染色体结果是[011001],这里并没有考虑位置1的让行标志,因此位置输出结果为0,依据输出结果可以确定2、3、6可以作为让行标志的部署位置。同时不完全分离的适应度明显要高于不分离,说明交叉口处采用交通岛渠化能够有效限制右转车辆减速,从而帮助右转车辆在到达人行横道处时减少与行人发生冲突。
表5 遗传结果输出Tab. 5 Output of Genetic algorithm
4 结论
本文建立交叉口右转车辆与行人时空模型,旨在从时间和空间的角度研究右转车辆和行人的冲突特性。时间角度分析RTOR和PPRT模式下的冲突概率,确定了PPRT模式下的右转车辆与行人冲突要优于RTOR模式;空间角度根据右转车速、车道宽度、视距建立信息效益最大化模型,利用遗传算法进行求解。结果表明,交叉口处采用右转相位以及交通岛渠化能够减少右转车与行人的冲突,让行标志的优化设置也可为驾驶员是否采取减速措施提供更多信息。
猜你喜欢
现代青年·精英版(2022年3期)2022-04-06
建材发展导向(2021年19期)2021-12-06
意林(2021年5期)2021-04-18
中国人民公安大学学报(自然科学版)(2020年4期)2021-01-07
扬子江(2019年1期)2019-03-08
小天使·一年级语数英综合(2017年6期)2017-06-07
汽车与安全(2016年5期)2016-12-01
中国房地产业(2016年2期)2016-03-01
汽车文摘(2015年11期)2015-12-02
系统工程学报(2015年3期)2015-02-28
