肩关节前方不稳肩胛盂与肱骨头骨缺损的CT测量研究进展
2022-11-23 09:48:36邓海权李书振李百川孙建超孙可
中国运动医学杂志 2022年9期
邓海权 李书振 李百川 孙建超 孙可
广西医学科学院,广西壮族自治区人民医院,关节·运动医学外科(南宁 530021)
影响肩关节前方不稳的手术效果有两个关键因素,第一是准确的肩胛盂(Bankart损伤)及肱骨头(Hill-Sachs损伤)的骨缺损值测量,第二是根据骨缺损值进行牢固可靠的软组织或骨性固定手术。在关节镜应用于肩关节前方不稳手术治疗的早期,手术医生并未充分认识到肩胛盂及肱骨头骨缺损的重要性,大多数手术以软组织修复为主(如软组织Bankart修复、前方关节囊紧缩),但是随后不少研究发现关节镜软组织修复存在较高的复发率(7%~49%不等),有学者因此提出关节镜不适宜应用于肩关节前方不稳的手术治疗[1-5]。2000年Burkhart及De Beer通过随访观察194例进行软组织Bankart修复的肩关节前方不稳的患者,发现术前存在明显肩胛盂或肱骨头骨缺损的病人术后复发率高达67%,而没有明显骨缺损的病人复发率仅4%,他们指出对于没有明显骨缺损的患者关节镜Bankart修复和开放Bankart修复效果相当,而存在明显骨缺损的患者则应该选择开放Latarjet等骨性固定手术[6]。由此掀起了对肩关节骨性缺损测量研究的热潮。根据不同的测量原理,目前已有十余种测量肩胛盂及肱骨头骨缺损的方法,但是每一种方法都有理论上的优势和缺陷,临床实际应用情况也繁简不一,所以针对肩关节前方不稳目前尚无统一的骨缺损测量方法[7-9]。由于三维CT在显示骨性结构上比X线、磁共振成像(magnetic resonance imaging,MRI)有明显优势,目前大部分方法是基于三维CT的骨缺损测量[10-12]。根据上述现状,本文通过在Pubmed、Europe PMC、Cochrane、中国知网数据库检索1990年1月至2022年6月发表的有关肩关节前方不稳的文献,重点梳理总结在肩关节前方不稳中采用三维CT测量肩胛盂及肱骨头骨缺损的方法,为进一步优化测量方案、指导临床术式选择提供依据。
1 肩胛盂骨缺损的测量
1.1 线性测量方案
此类方案主要通过三维CT构建肩胛盂正面位(en face view),测量缺损骨块的宽度、长度及肩胛盂的半径、纵轴长度等线性指标,经过一系列的计算,得出缺损骨块占肩胛盂下方圆的面积比例,进而指导手术方式。基于此类理论的方法大多比较容易应用,但也存在一定的系统性缺陷。
1.1.1 缺损骨块宽度比盂下方圆直径
该方法是肩关节前方不稳骨缺损测量里最为经典也是使用最多的方案,也被称为“直径法(diameter method)”、“线性法(linear method)”、“肩胛盂指数(glenoid index)”等。该方法由镜下使用探钩测量肩胛盂下方骨缺损演变而来。早期Burkhart等[13]发现肩胛盂中下部近似正圆形,其圆心位于裸点(bare spot)附近,在镜下使用有刻度的探钩分别测量盂后缘到裸点的距离d1、缺损前缘到裸点的距离d2,可以得到骨缺损比值随后Chuang等[14]对该方案进行了优化,将其应用于三维CT上,以便更好地在术前进行术式规划。该方案要求有双侧肩胛盂的三维CT数据(图1,i),去除肱骨头遮挡,把肩胛盂调至正面位,先测量健侧肩胛盂的纵轴长度H1(盂最上缘至盂最下缘)、盂下方横轴长度W1(下方盂垂直于纵轴的最宽横径),得出两线交点O1及其所代表的下方圆半径R1。接着测量患侧盂的纵轴长度H2,根据比例计算出患侧盂受损前的横轴长度患侧盂下方圆半径R2=然后在患侧盂纵轴最下缘往上标记出等于R2距离的点,此点即为患侧盂下方圆圆心O2,经O2做纵轴的垂线即得损伤后下方盂的横轴长度W2,肩胛盂指数’,骨缺损比值一般认为骨缺损比值q大于20%~25%就可能出现软组织Bankart修复术失败,需要进行骨性固定手术。由于Chuang的测量方法需要用到双侧肩关节CT数据,且需计算多次,临床使用过程中有学者不断简化该测量方案[15,16],最终演变为在患侧盂下方根据后缘及下缘残余盂画出最拟合的正圆(best-fit circle)后只测量缺损骨块宽度d及
下方圆直径D,骨缺损比值(图1,ii)。该简化方案测量次数少,计算简便,且能够和镜下探钩测量数据相对比,临床使用率比较高。但由于该方案需要在缺损盂下方画圆并量出缺损宽度,圆的大小及位置会受残余盂的形态和测量者的主观经验影响,缺损宽度也会受圆直径及盂形态影响,测量结果较易产生波动和误差[17,18]。有学者发现如果盂前方骨缺损不规则,残余盂呈凸出或凹陷形态时,直径法测量的数据容易偏小或偏大,分别测量缺损缘2、3、4、5点钟(以右肩为例)的长度取平均值再使用直径法可以减少这类误差[19]。
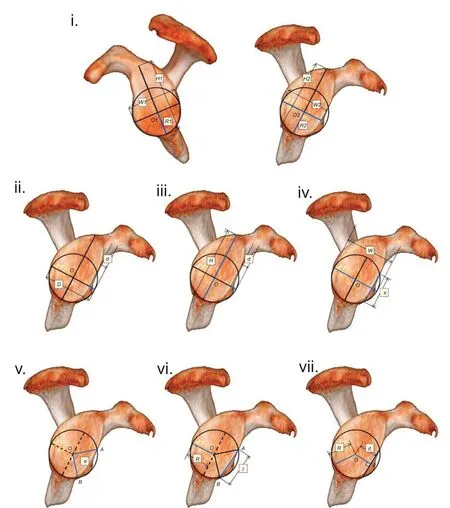
图1 肩胛盂骨缺损的常见线性测量方案
1.1.2缺损骨块宽度比盂纵轴长度
Itoi等[20]通过在肩胛盂尸体标本上逐步增加盂的缺损程度评估盂的稳定性(图1,iii),发现当前下方肩胛盂缺损骨块宽度d达到或超过盂纵轴长度H的21%时(即肩胛盂软组织修复后的稳定性出现明显下降。Yamamoto等[21,22]把盂缺损放到盂的前缘进行了类似的生物力学实验,发现时盂的稳定性会出现明显下降。由于盂的纵轴基本不受缺损骨块的影响,这个测量方案使用盂的纵轴长度做为骨缺损比值的分母可以使测量更为直接且误差更小,但这个方法只在生物力学实验中有使用,临床应用报道得少。
1.1.3 盂缺损缘长度比盂下方圆直径
该方法由Gerber和Nyffeler首次提出,所以也被称为“Gerber法”、“X指数(X index)”[23,24]。Gerber法测量肩胛盂缺损缘的长度x和盂下方圆最大前后径长度w(图1,iv),对两者数值进行比较来判断选择何种术式。他们通过生物力学实验发现,如果盂缺损缘的长度x超过盂下方圆最大前后径长度w的一半时(即x≥0.5w),肩胛盂会丢失前脱位阻挡力30%以上,不再适宜使用软组织修复手术[23]。Gerber法偏重根据测量结果指导临床术式的选择,对于在阈值以上或以下的结果没有太多的关注,所以在临床应用时较为简便,但后期数据分析时会有一部分的信息丢失[25]。另外Gerber等当初在进行生物力学实验时盂缺损缘是位于盂的前下方,盂缺损缘长度x对盂前后径w没有太多影响,而后续的研究发现临床上大部分前方不稳的骨缺损位于盂正前方,盂缺损缘与盂纵轴平行,这样就会影响盂前后径w的直接测量[26]。可以通过在肩胛盂下方画正圆再测量直径[27],也可以通过一定的公式从盂纵轴长度求出盂下方圆直径[28,29]。
1.1.4 弧角度法
在肩胛盂下方圆的范围里,盂缺损缘相当于圆的一条弦,盂骨量缺失会造成弦长度的改变,对应的弧长度和圆心角也会发生改变,即每一个特定的圆心角可以对应特定缺损缘长度及缺损范围。Dumont等[30]基于这个原理提出了弧角度法(图1,v),他们在盂下方画出拟合圆后经圆心分别连接盂缺损缘的最上端和最下端,两线夹角α即为缺损缘对应的特定圆心角,再根据下方拟合圆的三角函数关系求出骨缺损比值q=(式中α使用弧度制)。为了临床使用方便,Dumont等[30]还在文献中绘制了特定角度对应盂缺损面积的百分数,如弧度角α为60°、90°、120°时对应缺损面积q为2.88%、9.08%、19.55%。这个方案的计算结果是缺损圆弧面积,较直径法更接近实际缺损情况,且使用起来也较为简便,对盂缺损缘的三维重建要求不高,即使是在MRI上也可以根据矢状位盂唇形态测算盂缺损面积。后续还有Rouleau等[31]根据这个原理提出了“时钟法(clock method)”,通过计算起始时间及终止时间(即正面位上盂缺损缘最下端及最上端)也可以得出对应的缺损面积。值得注意的是虽然弧角度法对盂缺损缘的上下端测量要求不高,但圆心的定位非常重要,下方拟合圆的圆心稍往前或往后偏离即可出现弧度角的明显改变。
1.1.5 根据盂缺损缘长度及盂下方圆半径计算的公式法
Parada等[32]运用了与弧角度法类似的原理,即圆的每一条特定弦对应一个缺损圆弧面积,但他们没有直接测量缺损缘对应的圆心角,而是通过缺损缘的长度算出圆心角(图1,vi)。具体为在肩胛盂正面位上画出下方拟合圆后连接盂缺损缘的上端及下端,得出盂缺损缘长度l,再做垂直于缺损缘的直径,求得圆的半径r,根据公式可以求出盂缺损缘对应的圆心角α(式中α使用角度制),而缺损的圆弧面积B=r22(下方拟合圆的面积为A=πr2,所以骨缺损比值该方法使用较为直观的盂缺损缘长度计算对应圆心角,可以一定程度避免因圆心位置偏差而产生的数据波动,但使用的公式计算较为繁琐,不如弧角度法简便。
1.1.6 根据圆心至盂缺损缘的距离及盂下方圆半径计算的公式法
Barchilon等[33]根据圆弧面积的几何原理推导出了可以直接求骨缺损比值的公式(图1,vii)。他们在三维CT建立正面位肩胛盂后分别测量下方拟合圆的半径R和圆心到盂缺损缘的距离d,然后将代入公式求出骨缺损比值这个方法虽然测量的数据较少,理论上也反映了实际的骨缺损圆弧面积,但是后续计算的公式较为复杂,需应用软件进行计算,所以Barchilon等[33]也并不推荐在日常直接使用该公式,并在文献中给出了缺损面积与的关系曲线图,可以根据数值在曲线上找到对应的缺损面积,减少后续的计算。
1.1.7 汤匙法
传统线性测量方案依靠肩胛盂下方和后方的残留盂最外侧边缘画出最拟合圆,并进一步测量相关的缺损数据。但Moroder等[18]认为肩胛盂的稳定性靠盂凹形腔(glenoid concavity)维持,最拟合圆应该放在盂凹形腔的最高处也是盂凹形腔的最外侧缘位置,而盂凹形腔的最外缘位于残留盂的内侧,这就使得新拟合圆要比传统拟合圆小,整个拟合圆向盂中心靠近。构建新的拟合圆后再进行相关骨缺损数据的测量,Moroder等[18]将这个测量方法称为汤匙法(spoon method),认为能更准确反映实际肩胛盂凹形腔的骨缺损程度。该方法有其理论上的意义,但目前尚没有相关的生物力学实验及临床数据支持,Moroder也没有在文献中说明如何定位盂凹形腔的最高点,并且由于其改变了最拟合圆的位置,后续所测的缺损数据无法与传统拟合圆数据相比较,目前还不能根据特定缺损阈值指导临床术式选择。
1.2 面积测量方案
以面积为主的测量方案仍需使用三维CT构建肩胛盂的正面位,但后续测量的是盂下方圆的面积和缺损骨块的面积,再计算相关的骨缺损比例。面积测量方案与前述的线性测量方案共同构成了肩关节前方不稳骨缺损三维CT测量的两大传统方案。
1.2.1 单侧面积测量法
Sugaya等[34]通过分析三维CT重建的100名单侧肩关节前方不稳患者,提出可以通过测量缺损骨块面积来反映骨缺损程度,这个方法也被称为“面积法(area method)”、“Sugaya法(Sugaya method)”(图2,i)。具体为使用三维CT获得患侧肩胛盂正面位,在盂下方画出最拟合圆,软件计算该最拟合圆的面积A,然后再沿缺损骨块轮廓描绘骨块外形,软件计算缺损骨块的面积b,则肩胛盂的骨缺损值。值得注意的是Sugaya等[34]一开始提出的测量方案是测量缺损骨块的面积,但是有不少病人缺损骨块吸收变小,还有部分病人缺损骨块消失只剩下磨损的肩胛盂缺损前缘,如果仍按原方案测量会使计算值偏小,不能反映真实缺损情况。由于完整的肩胛盂中下部分近似正圆,所以后续有学者对面积法进行了改进,测量的缺损面积b改为肩胛盂缺损缘前方与最拟合圆构成的空缺部分面积,然后再与最拟合圆面积对比求出骨缺损值[15,35](图2,i)。改进的面积法更契合实际的骨缺损情况,也在临床上使用更为广泛。
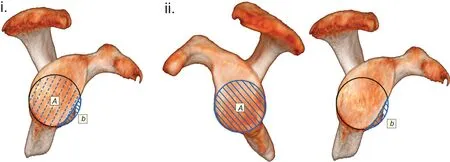
图2 肩胛盂骨缺损的常见面积测量方案
1.2.2 双侧面积测量法
该方法最先由Baudi等[36]提出,他们为了纪念意大利哲学家Pico della Mirandola,把这个方法也称为“Pico法(Pico method)”[37](图2,ii)。与单侧面积测量法不同,Pico法默认双侧肩胛盂外形一致,可以使用健侧肩胛盂的数据对患侧肩胛盂进行分析。Pico法先在CT上构建健侧肩胛盂正面位,在盂下方根据盂的轮廓画出最拟合圆,再在患侧肩胛盂正面位上画出同样大小的最拟合圆,根据残余肩胛盂轮廓调整最拟合圆位置,软件计算肩胛盂缺损前方与最拟合圆的空缺面积b和最拟合圆的面积A,患侧肩胛盂的骨缺损值100%[16,37]。由于健侧肩胛盂保留了完整的3点钟至9点钟下方盂轮廓,比较容易画出最拟合圆,减少了根据患侧盂直接画最拟合圆的定位困难,所以Pico法在测量结果上比单侧面积法更为稳定[38]。但Pico法也有一定的缺陷,比如它需要双侧肩胛盂CT数据,会有增加病人辐射剂量的风险;要求对侧肩胛盂完好,不适用于双侧肩关节不稳的患者。
1.3 立体测量方案
立体测量方案不单关注缺损骨块的宽度、长度,还关注骨块深度、肩胛盂凹陷度等立体指标,需要使用更专业的软件进行术前评估,意在更真实地反映肩胛盂的骨缺损情况,但这些方案应用起来也比线性测量方案和面积测量方案更为复杂。
1.3.1 三维重建缺损肩胛盂
Diederichs等[39]使用CT分别三维重建健侧及患侧肩胛盂,把健侧肩胛盂通过软件垂直镜面投射为对侧肩胛盂形态,然后把患侧肩胛盂和变换过来的完整肩胛盂重叠,完整肩胛盂比患侧肩胛盂多出的骨性部分即为“缺损”的肩胛盂骨块,后续可以使用软件进一步提取这个缺损的骨块进行骨块宽度、长度、深度及体积的测量。这个三维重建缺损肩胛盂的方法可以较为完整地获得实际缺损骨块的立体结构,这些立体结构理论上可以使用3D打印制造出对应的骨缺损模型,对于需要进行骨性固定手术的患者术前骨块移植方案的设计有一定帮助。但是Diederichs等[39]仅介绍了如何重建缺损骨块的方法,并没有说明如何根据获得的立体骨块来指导临床术式选择,相关的应用指标还需进一步发掘。
1.3.2 肩关节骨性稳定率
Moroder等[40]通过对比非创伤性肩关节不稳患者、创伤性肩关节前方不稳患者和正常人的肩胛盂,发现非创伤性肩关节不稳患者和创伤性肩关节前方不稳患者都存在肩胛盂凹形腔深度的丢失,且非创伤性肩关节不稳患者丢失程度更多,他们认为肩胛盂的稳定性与盂凹形腔深度有密切关系,并提出了肩关节骨性稳定率(bony shoulder stability ratio,BSSR)概念(图3)。BSSR是个生物力学指标,由于盂肱关节是个球窝关节,假设垂直于关节面的稳定压力为C,平行于关节面的移位力为T,则BSSR=T/C在CT上可以测量肩胛盂凹形腔半径r及盂的凹形腔深度d,根据几何关系可以推出通过公式可见肩胛盂的稳定性和盂凹面半径及深度都有密切关系。Moroder等[42]后续结合有限元软件对肩关节前方不稳的病人进行分析,提出二维层面测量肩胛盂的缺损宽度或面积并不能完全反映肩胛盂的骨缺损程度,肩胛盂更深的个体拥有更稳定的BSSR,但发生同样宽度的肩胛盂骨缺损时他们比肩胛盂浅的病人丢失深度更多,BSSR下降幅度更大,肩关节稳定性更差,此时用同一个阈值决定不同肩胛盂深度的病人的手术方式可能会影响手术的固定效果。BSSR对目前广泛使用的线性法、面积法及后文的轨迹法都有一定程度的冲击,肩胛盂凹形腔深度等立体指标值得后续进一步研究,如何简便地利用这个概念指导临床也需要进一步探索[43,44]。
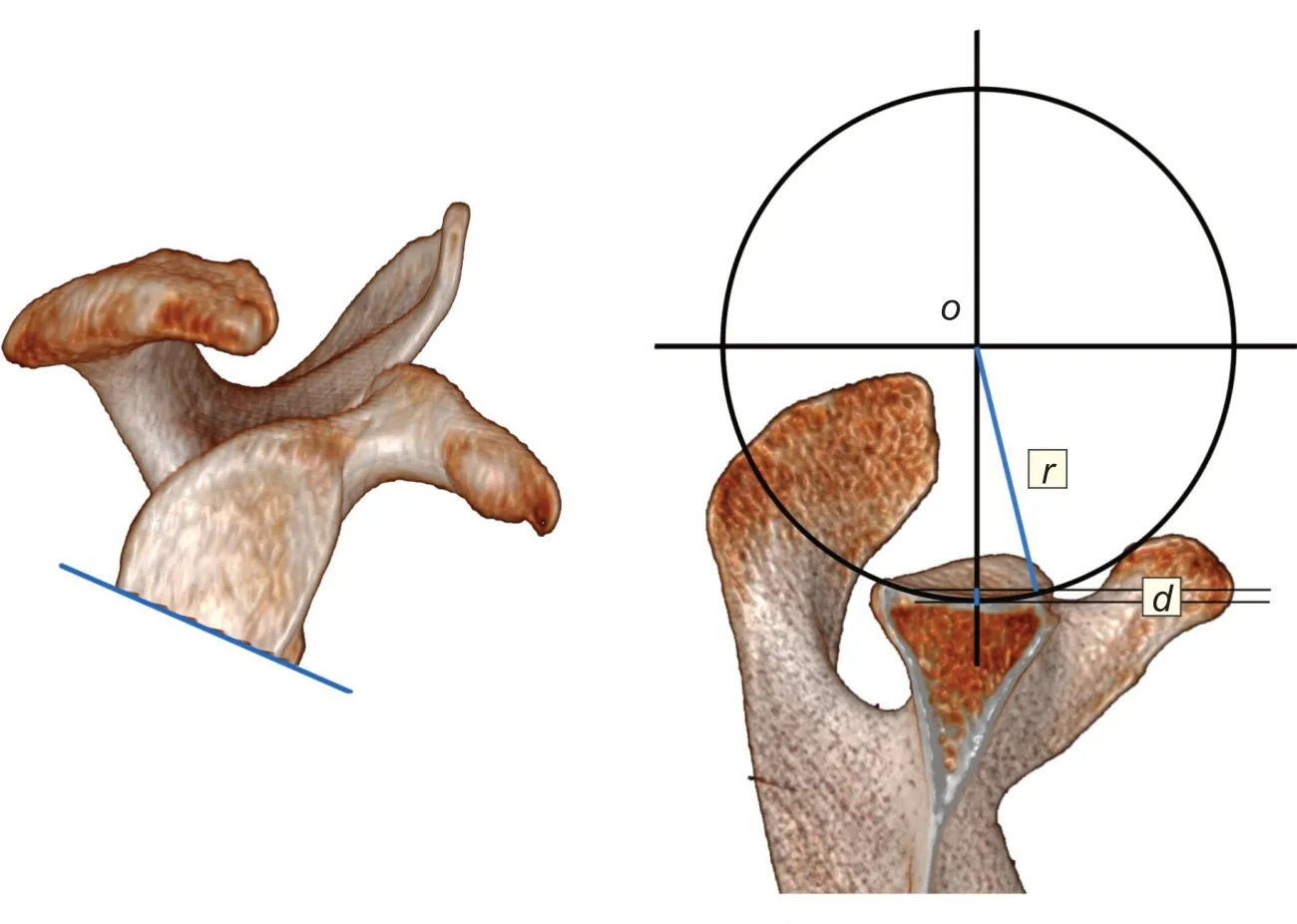
图3 肩关节骨性稳定率(BSSR)的测量
2 肱骨头骨缺损的测量
肩关节前脱位除了有肩胛盂Bankart损伤外常伴有肱骨头的Hill-Sachs损伤,在复发性前脱位中Hill-Sachs损伤的发生率高达87%[45],但是肱骨头后方骨缺损的测量方案却不如肩胛盂骨缺损测量方案那么丰富,相关指标的临床应用价值也比较有限,需要进一步的研究及改善。
2.1 Hill-Sachs损伤的基本形态学指标
这些指标包括Hill-Sachs损伤的宽度、长度、深度、体积及方向。一般在三维CT重建肱骨头后直接测量,骨缺损的最长横轴及最长纵轴即为Hill-Sachs损伤的宽度及长度[46](图4,i)。Hill-Sachs损伤的深度需要使用肱骨头面积最大的横断面,以肱骨头关节面外轮廓为准画圆,圆的直径上由圆周至骨缺损基底部的最长线段即为Hill-Sachs损伤的深度[47](图4,ii)。Hill-Sachs损伤的长度、宽度、深度相乘即为骨缺损的体积[48]。其中长度、宽度、深度可以表示为测量出来的具体数值,也可以除以肱骨头直径表示为百分比,以减少个体差异[49]。Hill-Sachs的方向可以使用Hill-Sachs角(Hill-Sachs angle)表示(图4,iii),具体为三维CT上以Hill-Sachs损伤最深的沟壑处做直线,与肱骨纵轴相交的夹角即为Hill-Sachs角[47]。Cho等[47]通过三维CT发现咬合Hill-Sachs损伤组的基本形态学指标要比非咬合Hill-Sachs损伤组数值更高,有统计学差异,但是他们没有给出具体的阈值或范围以确定Hill-Sachs是否咬合,也就无法根据这些指标直接指导临床术式的选择。
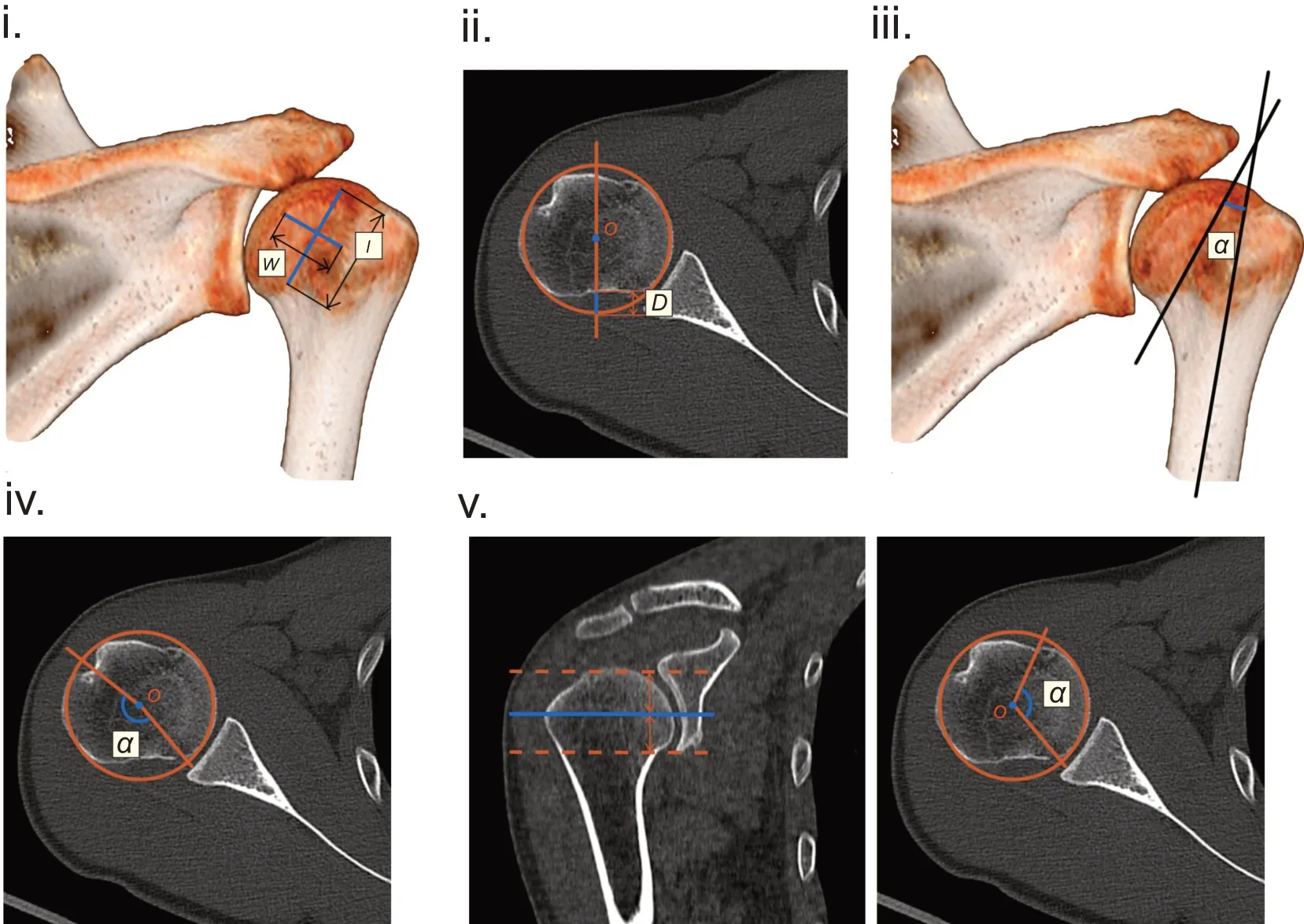
图4 Hill-Sachs损伤肱骨头骨缺损的常见测量方案
2.2 改良肱二头肌角
Saito等[50]曾提出可以根据肱二头肌沟对Hill-Sachs损伤进行定位,Cho等[47]基于这个原理在肱骨头横断面CT上分别连接圆心与肱二头肌沟、Hill-Sachs损伤中点,测量两线夹角,称为肱二头肌角(biceps angle),发现咬合Hill-Sachs损伤组和非咬合Hill-Sachs损伤组肱二头肌角并没有统计学差异。但是后续Gyftopoulos等[51]对该夹角进行了改良,在肱骨头横断面上连接圆心至Hill-Sachs损伤最内侧缘,其与圆心至肱二头肌沟连线形成的夹角即为改良肱二头肌角(modified biceps angle)(图4,iv)。Gyftopoulos等[52]发现咬合组比非咬合组的改良肱二头肌角更大,差异有统计学意义,并提出可以选择改良肱二头肌角149°做为判断是否咬合的阈值,大于该角度则更容易咬合,其特异度和灵敏度分别为67%和70%。改良的肱二头肌角测量比较简便,实用性强,但可能由于没有合并评估肩胛盂骨缺损的程度,它的特异度和灵敏度还不够完美,在阈值附近有较大的咬合与非咬合重叠区域。
2.3 完整前关节角
Burns等[53]认为肱二头肌沟的形态及解剖位置存在个体差异,利用肱二头肌沟定位会影响Hill-Sachs损伤的测量,他们认为肱骨头关节面前缘是一个更为可靠的解剖标志,并提出完整前关节角(intact anterior articular angle,IAAA)的概念(图4,v)。Burns等[53]在CT上选择离肱骨头关节面上缘和下缘等距离的横断面,在该轴位片上肱骨头关节面最前缘、Hill-Sachs损伤最内侧缘与圆心连线构成的夹角即为完整前关节角,他们再利用直径法测量肩胛盂的骨缺损比例,得出完整前关节角合并肩胛盂骨缺损的肩关节咬合概率图,在完整前关节角与肩胛盂骨缺损比例小于一定阈值时肩关节咬合的概率小于5%,这种情况下软组织修复手术也能获得稳定的效果。Burns的方法在低于阈值的骨缺损中有较好的临床指导意义,但是需要同时测量肱骨头和肩胛盂的骨缺损,其阈值是根据肱骨头和肩胛盂骨缺损值动态调整的,当其中一处骨缺损大于阈值而另一处骨缺损小于阈值时则无法判断是否会发生咬合,仍需要使用其他方法来评估。所以Burns等也认为这种方法最适合用于肩关节是否咬合的初步筛查[53]。
3 肩胛盂和肱骨头骨缺损的同时测量
肩关节前脱位实际上是肩胛盂和肱骨头正常的解剖位置发生改变,原有的球窝关系无法维持的结果,涉及到肩胛盂和肱骨头两个骨性结构,对脱位的预测和骨缺损的评估理论上也应同时包括肩胛盂和肱骨头两方面,所以目前还有一些同时测量肩胛盂和肱骨头骨缺损的方案。
3.1 肩胛盂轨迹理论
该理论源自于早期的肩关节咬合理论,是在肩胛盂骨缺损评估基础上对Hill-Sachs损伤的二次评估。Burkhart等[6]在早期提出,如果肩关节处于功能位(约外展90°、外旋90°位)时镜下可见Hill-Sachs损伤长轴与肩胛盂前缘平行,则认为Hill-Sachs损伤可以与肩胛盂咬合(engaging Hill-Sachs lesions),反之则为非咬合损伤(non-engaging Hill-Sachs lesions)。咬合型Hill-Sachs损伤行单纯软组织Bankart修复术有很高的复发率,需行Remplissage修复术等处理[54]。但是该方法是在镜下评估骨缺损,在麻醉状态下肩关节的韧带及关节囊更为松弛,如在修复前评估可能出现假阳性,造成过度修复;如在软组织修复后评估则易破坏刚修复的结构,增加手术的失败率[55]。为了解决上述的问题,Yamamoto等[56]测量了肱骨头在肩胛盂的运动轨迹,Giacomo等[55]在此基础上提出了可以在术前三维CT或术中肩关节镜评估双侧骨缺损的肩胛盂轨迹理论(图5)。根据肩胛盂轨迹理论,肱骨头上盂肱关节接触面的最内侧点到肱骨头肩袖附着点内侧缘的距离约等于肩胛盂下方圆直径D的83%,该距离就是完整的肩胛盂轨迹长度(glenoid track,GT)。当肩胛盂有宽度为d的骨缺损时,实际肩胛盂轨迹长度为GT=0.83Dd。Hill-Sachs间隙(Hill-Sachs interval,HSI)为肱骨头后方肩袖附着点内侧缘到Hill-Sachs损伤的前内侧缘的距离,也等于Hill-Sachs的宽度加上肩袖附着点内侧缘与Hill-Sachs损伤外侧缘骨桥的距离。如果GT>HSI,则认为Hill-Sachs损伤在轨(on-track Hill-Sachs lesions);如果GT<HSI,则认为Hill-Sachs损伤不在轨(off-track Hill-Sachs lesions)[55]。肩胛盂轨迹法再配合常规肩胛盂骨缺损的测量(直径法、面积法等),是制定肩胛盂是否行Latarjet修复术、肱骨头是否行Remplissage修复术等手术方案的重要参考指标[57]。此测量方案指标较为简单,也能够较好反映盂肱关节的双侧骨缺损情况,正在被越来越多的外科医师所接受[58,59]。值得注意的是,虽然方案中认为三维CT上测量的骨缺损值与镜下测量结果等效,但是已有学者提出镜下与三维CT测量结果存在不一致的现象,可能会对手术方案选择产生影响[60]。

图5 肩胛盂轨迹理论的数据测量
3.2 动态接触面积比值
Weel等[61]把肩关节的三维CT数据导入Articulis软件,模拟肩关节前屈、外展、内旋及外旋动作,并在每一个动作改变1°时计算肱骨头和肩胛盂的接触面积,最后把所有接触面积相加并除以肱骨头的直径,得到动态接触面积比值(dynamic contact area ratio,DCAR)。他们发现肩关节前方不稳的患者DCAR比正常肩关节DCAR要低,差异有统计学意义,尤其是行Latarjet手术的患者DCAR明显下降[61]。该方法虽然较为真实地反映了盂肱关节活动及骨缺损情况,但是需要专门的软件计算,作者也没有完整地描述具体测量步骤,离临床应用还有一定距离,另外Weel等收集的病例数较少,很多肩关节不稳患者的DCAR值与对照组DCAR值重叠,无法得到根据DCAR决定手术方式的阈值,需要进一步研究。
4 有关骨缺损测量的其他问题
在计算肩胛盂骨缺损程度时无论是线性测量方案还是面积测量方案都要求先建立肩胛盂的正面位再测量,临床工作中常常是在三维CT上测量者自主建立肩胛盂的正面位,这就容易造成肩胛盂正面位带有比较大的主观性。Moroder等[18]发现如果在肩胛盂倾斜位置而不是正面位测量会使肩胛盂的骨缺损计算值偏小,会一定程度影响手术方式的选择,由于肩胛盂处于正面位时投影面积最大,因此他们提出实际测量时可以通过反复测量肩胛盂的宽度和长度来调整肩胛盂位置,当宽度、长度都获得最大值时即为正面位所在位置。近期Zhang等[62]提出一个基于专业计算机软件构建肩胛盂正面位的客观方法,他们把肩胛盂的三维CT数据导入软件后提取肩胛盂的表面点构建最拟合球,球面上做盂上结节和盂下结节连线,取连线中点为K并与球心O相连,线段OK即垂直于肩胛盂的正面位,通过算法调整线段OK所在轴垂直于屏幕即得肩胛盂的正面位。另外Launay等[63]也提出一个利用三维软件直接测量肩胛盂立体凹形腔面积的方法,这种在立体层面测量的面积可以不受肩胛盂位置的影响。上述方法基本是在软件内通过算法实现,避免了主观构建的误差,但是也因需要专门的软件而有一定的应用门槛。
值得注意的是,上文虽然提到了多种肩胛盂骨缺损的测量方法,但是由于测量原理不同,并不意味着这些方法的结果可以等价或简单互换。比如最常使用的直径法和面积法,有学者指出使用直径法计算出来的结果相当于矩形的缺损面积,而实际的骨缺损为下方圆的一部分,在直径法计算值为10%~30%时实际圆缺损面积要偏小5%左右[64]。使用肩胛盂纵轴、深度及肩胛盂轨迹法计算的骨缺损值也存在同样的问题。这种因为测量方案的差异而造成的结果不等价会给临床术式的选择和疗效的评估造成一定困难[7]。一般认为肩胛盂骨缺损大于20%~25%就需要行骨性固定手术[57,65-67],但是这个阈值(critical size)并没有强调是使用何种测量方案计算出的结果,而且近几年不断有学者根据不同测量方法提出更小的阈值[59,68-70],给统一骨缺损测量方案和疗效评估带来更大的挑战。在后续的研究中有必要进一步完善各个测量方案的关键阈值及方案之间的互换办法。为了便于临床研究的汇总分析,Gottschalk等[71]还建议后期的临床研究尽量包含基于三维CT的直径法、Pico法和Hill-Sachs损伤相关的测量结果。
5 总结
随着对肩关节前方不稳发病机理认识的加深和CT三维成像及后续软件处理的不断发展,肩关节前方不稳的骨缺损测量已从最初的简单形态学描述发展为线性测量方案、面积测量方案、立体测量方案和半动态测量方案并存的局面。各个方案均有其理论依据,也有应用的局限性,每个方案的临床指导阈值也有所不同。规范目前已有的骨缺损测量方案,寻找更为契合肩关节前方不稳发病机理的测量方案,并尽量简化测量步骤以便临床应用,仍然是今后肩关节前方不稳研究的重要主题。
猜你喜欢
骨科临床与研究杂志(2021年4期)2021-07-14 05:14:36
中华养生保健(2020年10期)2021-01-18 06:45:16
临床外科杂志(2020年8期)2020-09-15 01:41:30
实用医学杂志(2019年23期)2020-01-17 01:07:22
中华肩肘外科电子杂志(2019年4期)2019-08-24 06:38:52
中国医学影像学杂志(2016年7期)2016-09-22 09:03:36
西南军医(2016年5期)2016-01-23 02:20:28
中国康复理论与实践(2015年7期)2015-05-09 08:31:49
西南军医(2015年3期)2015-04-23 07:28:16
创伤与急危重病医学(2014年4期)2014-03-25 04:47:03