无人机倾斜摄影在土方测量中的应用研究
2022-11-23 02:37:14林金标
河南科技 2022年21期
林金标
(福建省地质测绘院,福建 福州 350011)
0 引言
目前,采用无人机倾斜摄影技术对土方量进行测量,克服了传统土方测量易受复杂地形条件影响,造成工作缓慢、成本提高的问题。无人机倾斜摄影具有高分辨率、生产效率高等优点,能保证整个项目数据的一体性,大大提高土方测量的速度与精度。
1 土方计算原理
一般采用南方CASS10.1软件对土方进行计算,常用的土方计算方法有DTM法、断面法、方格网法、等高线法等。
1.1 DTM法土方计算
DTM法适用于地形复杂、不规则形状区域的计算,但不适合地势变化较大区域的计算。因软件生成的三角网不能与高低起伏的复杂地形地貌相吻合,要由人工对一小部分三角网进行修改,使之与高低起伏的地形地貌贴合。通过对开工前和填挖后两期地面点坐标和高程进行实测,利用软件分别生成两期三角网,将指定范围分割为若干个三棱锥,并进行编号,计算每个三棱锥的体积,最后通过累加每个空间立体的体积,计算得到指定范围内的填(挖)方量。
1.2 断面法土方计算
断面法适用于地形狭长的带状区域,计算精度取决于各条横断面的里程间距,横断面间距越小,计算精度就越高。对高低起伏变化较大的地形,应缩小横断面间距,增加横断面条数。通过获取纵断面线上每个里程处的实测横断面线与设计横断面线所组成的横断面图,从而求出相邻里程两条横断面面积的平均值,再乘以这两条横断面的间距,可计算出每两条相邻断面间的土方量,汇总所有两条相邻断面间的土方量,即可计算出该地块的总填(挖)方量。
1.3 方格网法土方计算
方格网法适用于地势平坦、起伏不大的地形或测区范围大的区域,但不适合地形起伏变化较大的区域。方格网的宽度越小,计算精度就越高。通常情况下,方格网四个角点的高程是周边点高程通过内插的方式得来的,不考虑地形变化。通过预先输入方格网边长,将计算范围划分成一个个方格,把每个方格四个角的高程相加后取其平均值,并与设计标高相减得出挖(填)高度,再把这个挖(填)高度乘以对应方格的面积,从而计算出各个长方体的体积,最后对所有长方体的体积进行累加,即可计算出该地块的总填(挖)方量。
1.4 等高线法土方计算
等高线法适用于土方概算、地形坡度大的区域,该方法可计算任意两条等高线之间的土方量,但所选等高线必须闭合才有效。通过软件自动求出相邻两条等高线所围的面积,即可得到两条等高线之间的高差,根据相邻等高线所围的面积乘以其高差,从而计算出每相邻两条等高线间的土方量,最后累加所有相邻两条等高线间的土方量,即可计算出该地块的总填(挖)方量。
2 无人机倾斜摄影的应用
本研究以福建省莆田市某地块的土方测量为例,该地块东西长约290 m,南北长约170 m(见图1),该地块现为旱地,植被稀疏低矮,地势相对平坦,最低处高程约为21.0 m,最高处高程约为26.0 m,属地势平坦的地形,故采用方格网法来计算土方量。
2.1 外业数据采集
2.1.1 外业像控点布设。在测区四个角点向外侧约25 m处均布设像控点,其他区域按两点间距为150~180 m均匀布设8个像控点。像控点一般布设在清晰的线状地物交点处、明显地物的折角顶点;在无明显地物标志的区域布点时,要在地面上埋设不小于30 cm×30 cm的水泥桩,且在水泥桩面上用红油漆刷出“十”字形,十字中心要加喷直径为4 cm的圆点作为像控点标识。
2.1.2倾斜多视影像获取。本研究采取无人机倾斜摄影方法进行外业影像数据的采集,设备采用大疆无人飞行器DJI Phantom 4RTK,相对航高值设为50 m,测区平均高程位置影像地面分辨率优于1.5 cm,最低点影像分辨率优于2.0 cm。按照五向航线进行飞行,航向重叠度设为85%,旁向重叠度设为70%。为确保所摄影像能全面覆盖作业区域,航向及旁向覆盖均超出测区边界线一个相对航高值的范围,共计获取倾斜多视影像800多张。
2.1.3 像控点测量。像控点测量分为平面控制测量和高程控制测量,坐标系采用2000国家大地坐标系,高程基准采用1985国家高程基准。在无人机进行倾斜摄影时,大疆无人飞行器可同步获取像控点的平面坐标,在完成对像控点平面控制测量后,采用水准仪按四等水准精度进行高程控制测量。
2.2 内业数据处理
2.2.1 实景三维模型生产。将像控点坐标数据、倾斜多视影像数据、POS数据导入到Context⁃Capture三维建模软件平台中,完成实景三维模型数据的生产。首先,在ContextCapture三维建模软件中加载所有像控制点的坐标数据和多视影像数据。其次,区域网整体平差以光束法为基础,以中心投影的共线方程为一个平差基础方程,一张影像组成的一束光线作为一个平差单元,再将各光线束在空间中进行平移和旋转,使模型间的公共光线实现最佳交会,把全部区域纳入到控制坐标系里,进而利用影像密集匹配构建三角网(TIN),将纹理映射到对应的三角网格中,即可生成实景三维模型。
2.2.2 土方量测算。①高程点数据处理。基于生成的实景三维模型数据,通过软件将其转换为高密度的高程点数据,从而提高土方量计算的准确性。判断实景三维模型上的高程点数据是否满足地形地貌的变化情况,如不满足,应补充采集明显地貌变化处的高程。②土方量测算结果。该案例地势平坦、起伏不大,适合采用南方CASS10.1软件方格网法进行土方计算。经计算得出,挖方量为180 493.6 m³,填方量为0.0 m³。
3 精度评估
为评估无人机倾斜摄影开展土方测量的可行性、可靠性,采用像控点平面坐标、碎部点高程、土方量3个指标对案例测量的精度进行比较验证。采用华测RTK仪器测量的像控点平面坐标值与倾斜摄影实景三维模型采集像控点的平面坐标值进行比较(见表1);采用图根水准测量的碎部点高程值与倾斜摄影实景三维模型采集碎部点的同点位的高程值进行比较(见表2);采用方格网法土方计算方法、全野外数字化测量高程计算的土方量与倾斜摄影实景三维模型采集高程数据计算的土方量进行比较(见表3)。

表3 全野外数字化测量与实景三维测量的土方量比较
由表1可知,利用华测RTK测量像控点的平面坐标值与倾斜摄影实景三维模型采集像控点的平面坐标值之间较差的中误差为±2.6 cm,最大为±3.6 cm,满足规范规定点位中误差不应大于±5.0 cm的精度要求。

表1 华测RTK测量与实景三维采集像控点的坐标值比较
由表2可知,利用图根水准测量的碎部点高程值与同点位实景三维采集的内插高程值之间较差的中误差为±4.1 cm,最大为±6.0 cm,满足《城市测量规范》中土石方测量规定的检测高程与原测内插高程的平均较差应在±10.0 cm内的精度要求。
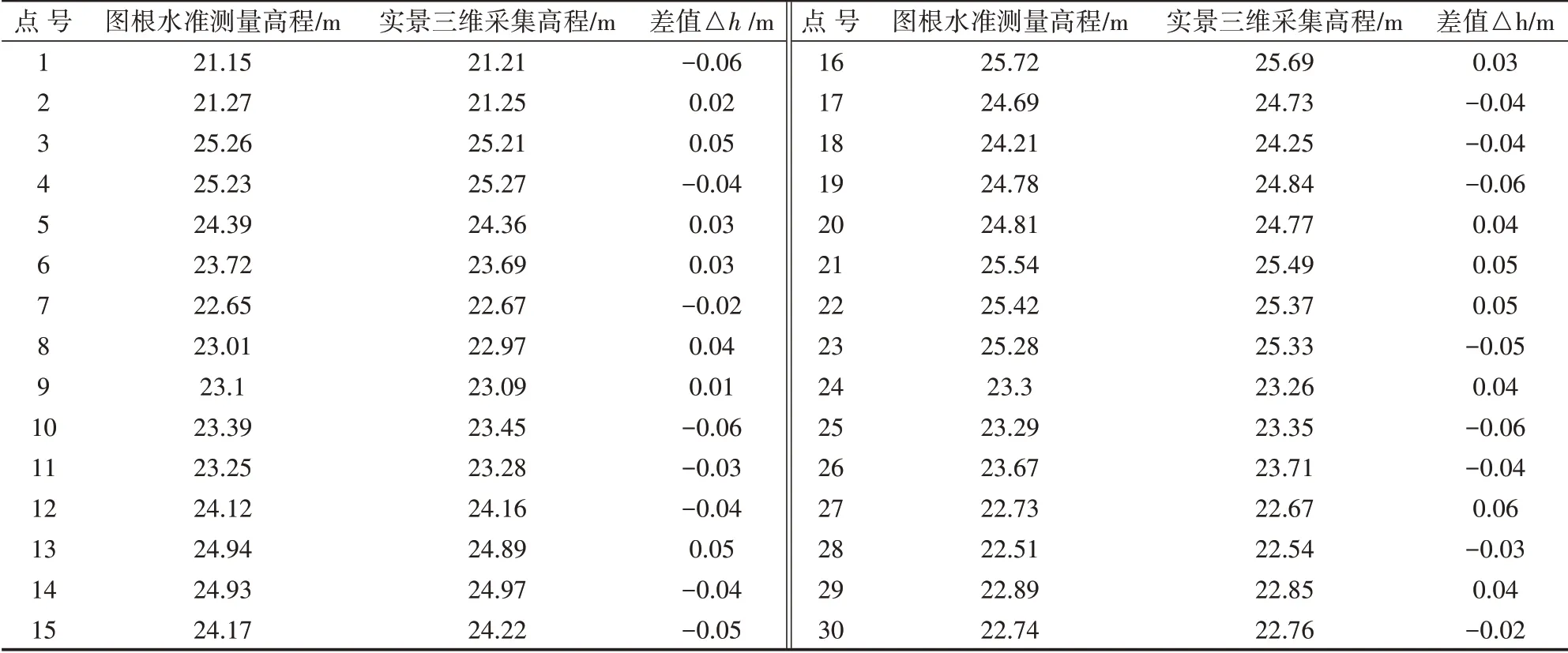
表2 图根水准测量与实景三维采集碎部点的高程值比较
由表3可知,采用同样的土方计算方法,采用全野外数字化法测量的土方量与实景三维模型测量的土方量之间较差如下,填方量较差为0.0 m³、差值百分比为0%,挖方量较差为−4 210.2 m³、百分比较差为−2.33%,均满足《城市测量规范》中规定的检核计算成果与原计算成果的较差应不大于原计算成果3%的精度要求。
综上所示,采用无人机倾斜摄影实景三维模型进行土方测量的计算结果是可靠的,满足实际需求,且具有较高的实用性。
4 技术优点
与传统的土方测量方式相比,无人机倾斜摄影在土方测量中具有灵活机动的优点,且不受地形的限制,在平缓或陡峭地区均适用,除植被茂密、密集建筑群等区域外,一般不用人工去现场补充测量。外业测量转为内业解析,工作更加高效快捷,减少人员的投入,减少外业的工作量,提高生产效率,节约生产成本。在地形地貌特征明显变化处无标注高程值时,可通过实景三维模型在地形地貌明显特征变化处直接点取其高程值,有针对性地补充采集遗漏处的高程值,避免传统土方测量方法容易出现高程点采集密度不够的问题,从而对土方量计算的精度造成影响。无人机倾斜摄影模型数据客观、真实,通过配套的软件可进行高度、长度、面积、角度的量测,能提供高精度、高真实感的高密度三维点云、实景三维模型等多元可视化数据。可获取DEM格式的高程点数据,可导入Civil 3D三维设计软件中进行分析处理,减少中间作业环节,真正实现内、外业一体化的作业流程。测量精度更可靠,处理环节更加简便,软件能对数据处理过程自动检查,减轻作业人员的工作强度,避免人为造成的错误。
5 结语
本研究详细介绍无人机倾斜摄影在土方测量中应用的全过程,通过与全野外数字化测量在像控点坐标、碎部点高程、土方量等3个方面的差值进行比较,验证无人机倾斜摄影土方测量的精度满足规范要求,计算结果是可靠的,且具有较高的实用性和可行性,在一定程度上能优化土方测量及计算流程,提高土方量的计算精度,但对被茂密植被、高大建筑物遮挡区域对无人机倾斜摄影土方测量计算精度的影响程度还要进一步研究。
猜你喜欢
数学小灵通(1-2年级)(2021年12期)2021-12-30 06:28:02
工程建设与设计(2021年11期)2021-07-28 06:33:08
数学小灵通(1-2年级)(2020年12期)2021-01-14 00:57:56
广东教学报·教育综合(2019年87期)2019-09-10 07:22:44
测绘通报(2019年1期)2019-02-15 04:56:06
小学生导刊(2018年16期)2018-11-30 08:46:07
小学生导刊(2018年1期)2018-03-15 08:02:35
中华老年口腔医学杂志(2016年6期)2017-01-15 14:25:21
地理教育(2016年10期)2016-11-09 00:32:53
中国感染控制杂志(2015年7期)2015-12-13 08:30:42