
纯电动汽车建模与性能分析①
2022-11-22 12:30石启飞
佳木斯大学学报(自然科学版) 2022年5期
石启飞
(宿州职业技术学院机电工程系,安徽 宿州 234001)
0 引 言
燃油汽车虽然技术非常成熟,自动化程度非常高,但对环境影响及能源消耗非常大,因此电动汽车作为一个非常具有前途的替代品具有很强的市场潜力,本文采用马恒达全电动四门轿车 e2o + P4型号电动汽车为研究原型,建立基本建模方程,描述模型,采用FLC策略提高制动有效性以及仿真性能分析对电动汽车进行分析及优化。
1 研究方法
1.1 建模所用的数学方程
建模的含义是系统用数学方程来进行表示。在纯电动汽车中,与牵引力[1-4]、机器建模[5]和电池参数[6]的方程是相关的。
1.1.1 牵引力的计算
牵引力(Ftr)由气动阻力(Fad),滚动阻力(Frr),爬坡力(Fhc),机械摩擦阻力(MFb)和线加速度和角加速度力(Fla&Fωa)组成。

表1 车辆参数
总牵引力Ftr的定义为
Ftr=Fad+Fhc+Frr+MFb+Fla+Fωa
(1)
其中,Frr为滚动阻力,这里取rr为0.01。混凝土路面的rr值为0.01 ~ 0.03,粗糙路面为0.1,沙质路面为0.3[7]。机械和摩擦制动(MFb)依赖于旋转机械部件如球轴承及其润滑,摩擦损失系数假设为0.005.
1.1.2 机械损耗
异步电机的损耗[7]用式(2)表示,其中Kl,Kc,Kw为电机损耗常数,C为恒定损耗,T为输出转矩,w为速度其单位为rad/s。电机损耗常数中,铜损耗为58%,磁芯损耗为25%,风阻损耗为12%,杂散损耗为5%。
Ploss=Kl*T2+Kc*ω+Kω*ω3+C
(2)
1.1.3 电池参数计算
电池模型以开路电压(Voc)、电池功率(Pbatt)和内阻(R)为输入,计算出电池荷电状态(SOC)和电池电流[8]。
(3)
这里Pmot为感应电机(IM)的输出功率,mot为电机的效率,假设为0.88。Paux为辅助电源,取300W。通过对(4)得到的加速度进行积分,估计出车辆的速度。
(4)
1.2 纯电动汽车的Matlab / simulink模型
用于BEV建模的逻辑如图2所示,其中给定的与车辆实际速度比较后的驱动周期作为PID控制器的输入[1,9],以产生所需的加速度或制动力。行驶周期是标准的模式,它表示速度与时间的关系,单位是m/s。由于电池荷电状态和车速、制动力等驾驶条件的不同,电池再生有一定的局限性。机械制动辅助再生制动,其中制动力的划分由模糊逻辑控制器完成[10,11]。
关于制动系统,制动所需的再生力大小由制动系统决定,当电机不处于静止状态时,再生力将供给电机。再生力由式(5)计算。电机与轮之间有一个比例为G的齿轮。车轮的半径用r表示。
(5)
图3为电机模型,其中加速器、再生转矩和电机转速作为输入,用于开发用于电机和再生的转矩包络线。电机输出转矩是推进转矩和再生转矩的结合,电机的功率损耗同样利用公式(2)来计算。感应电机的输入功率是电机的输出功率和电机的损耗之和。
如图4[12]所示的传动系统模型计算了估计速度所需的牵引力,该模型还计算了车辆的扭矩损失分量。
速度估计模型如图5所示。总牵引力是通过将电机的净转矩与车轮和机械制动力相加得到的,利用(4)计算加速度来估计车辆的速度。
图6为电池模型,分别计算电池电流和SOC。在此模型中,假设电池为磷酸铁锂(LiFePO4)。电池的Ah容量取决于所需的输入功率。
1.3 再生制动的模糊逻辑控制
电动汽车的再生制动是一种给电池充电并重新利用汽车内部能量的方法。但如果电池在没有控制的情况下接受电源,则会影响电池的寿命。为了提高电池的寿命,已经采用了不同的方法和技术。在这里使用FLC确保电池在再生制动中保持在安全的运行状态。FLC将再生制动力和机械制动力进行分解。FLC以所需制动力、电池SOC和车辆车速[12,13]为三个输入隶属度函数,如图8中的(a),(b)和(c),所需要的再生力的输出隶属度函数如图8中的(d)所示。
SOC的取值范围取[0,1]。在这里设计模糊规则时,考虑到SOC小于10%时,由于内阻[13]增大,不宜以较高的百分比对电池进行充电。当SOC水平很高时,特别是当电池处于无法吸收更多功率的位置时,需要的再生力应该降低。当SOC水平为中等时,最大的再生是可能的。对于低速的情况下,再生是无效的,因此再生制动力份额是低的。随着车速的增加,再生制动份额可以增加。这些规则的设计将确保电池在电动和再生模式下的安全运行。从FLC获得所需的再生力被给予如图3所示的机器模型。剩余的力即机械制动力是给定在图5中的传动系统模型。Rf是输出隶属函数,它是由FLC决定的所需再生力。射频= {Rf0,Rf1、Rf2Rf3,Rf4,Rf5,Rf6,Rf7,Rf8,Rf9,Rf10} ={.0.2 0, 0.1, 0.3, 0.4, 0.5, 0.6, 0.7, 0.8, 0.9, 1}。如图8(d)所示
2 仿真结果与分析
为了了解城市和高速公路对电力的需求,本文选择了改进后的中国驾驶周期以及城市和高速公路驾驶周期进行分析。从表3可以很清楚地看出,驾驶模式如何影响电动汽车电池的使用。这肯定将有助于改进,从而加强其实现更长的射程的能力。
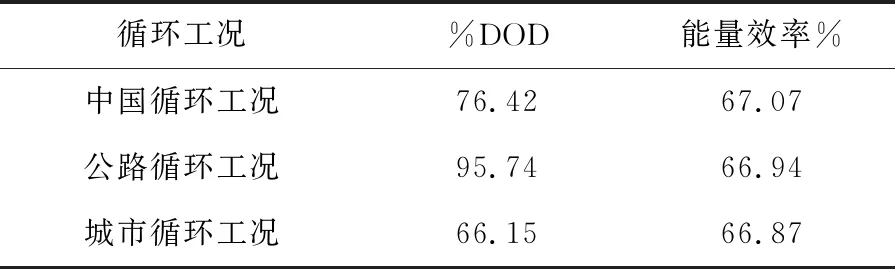
表2 对70公里范围内不同的行驶周期进行分析
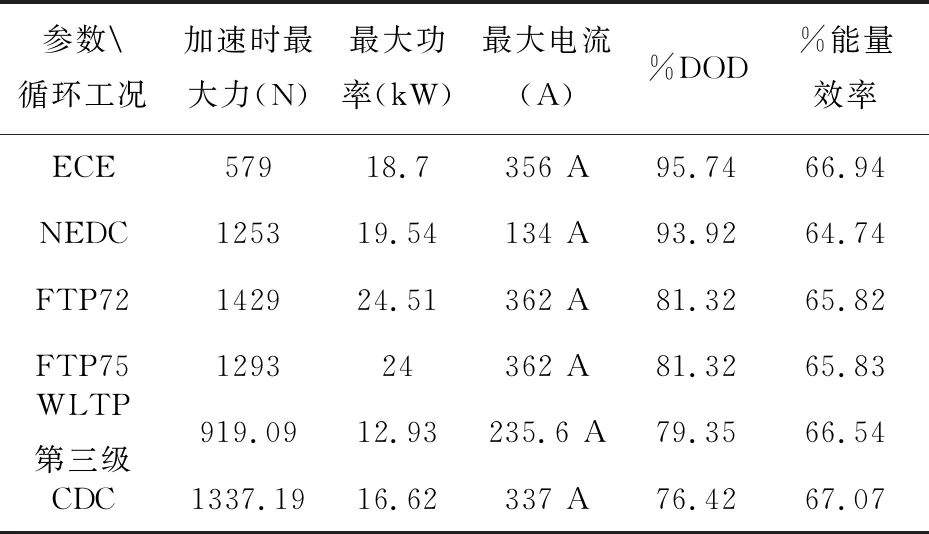
表3 驱动周期对70公里范围内各种参数的影响
从表2和图9可以很明显看出, 考虑再生制动的80%由机械制动辅助只剩余20%,在全里程70km的高速公路行驶工况下,显示着最高的排放深度,而在城市驾驶周期展示着最小值。 总的能源效率几乎保持相似的所有三个驾驶周期。
2.1 不同行驶工况对电动汽车参数的影响
在任何电动汽车中,随着驾驶模式的改变,一些基本因素都会受到影响。考虑NEDC,FTP72,FTP75,WLTP class 3、修改的中国循环工况等6种不同的循环工况进行分析[14]。表4对不同驾驶模式对电动汽车参数的影响进行了全面的总结。
在纯电动汽车中,电池应该能够在给定的范围内提供所需的能量。为了分析电池在每个周期内的DOD而采用了整车全航程的方法。效率在电动汽车分析中也起着至关重要的作用。加速度过程中的最大力、最大功率、最大电流、DOD和总体能效如表4所示。在恒定的70公里范围内, 从表4中可以明显看出,FTP72在加速过程中可能的力值最大,而ECE的力值最小,FTP72的最大加速度为1.475 m/s2,而ECE(也被称为EUDC的低动力车辆)的最大加速度为0.833 m/s2.
2.2 坡度对牵引力的影响
牵引力是斜率的函数。为了模拟并了解随着坡度的增加所需的功率百分比,坡度变化到10.8度,并记录相应的功率。为了分析,考虑了NEDC循环的平均速度(v)。牵引力方程为
Ptract=Pacc+Phillclimb+Prollresist+Paerodym
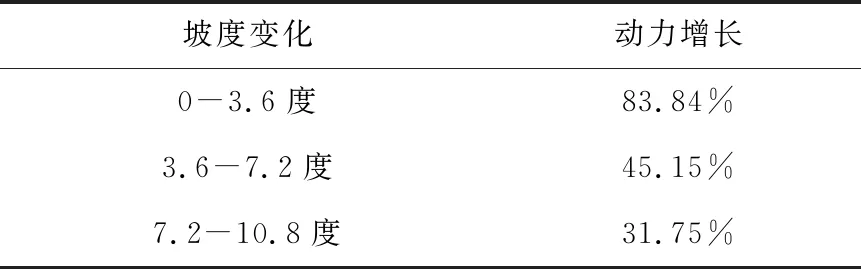
表4 根据坡度增加电力需求
从表5中可以看出,如果车辆从平坦道路上行驶在斜坡上则需要更多的动力,但如果车辆已经在斜坡上行驶,则实现斜坡所需的动力更少。
3 结 论
对所开发的纯电动汽车模型进行了仿真,并对不同的行驶工况进行了试验。分析给定范围内的不同周期,可以理解为最高百分比的DOD是ECE周期即高速公路驱动。在所有情况下电动电池汽车的能源效率几乎保持相似。此外,在对城市、公路和中国驾驶周期进行分析后,对于70公里的全行程,城市驾驶周期显示了由于再生影响而产生了最小百分比的DOD。由于大多数人只喜欢城市驾驶,如果纯电动汽车设计为同样的优势。重量变化的影响表现为电力需求的显著差异,突出了电动汽车的轻量化。在坡面分析中发现,车辆从平坦的坡面行驶比从某一坡度较高的坡面行驶功率需求更大。使用FLC再生制动,纯电动汽车的电池能够在安全的操作条件下运行,这将提高其寿命。
猜你喜欢
防爆电机(2022年2期)2022-04-26
昆明医科大学学报(2021年12期)2021-12-30
防爆电机(2021年5期)2021-11-04
儿童故事画报·发现号趣味百科(2019年9期)2019-02-02
电机与控制学报(2018年9期)2018-05-14
公务员文萃(2018年11期)2018-01-10
科技创新与应用(2017年26期)2017-09-12
科技创新与应用(2017年1期)2017-05-11
中学生数理化·高一版(2016年4期)2016-11-19
科技与创新(2016年6期)2016-04-21
