
智能一体化水面垃圾清理装置
2022-11-11 09:35谢宇宋其江王梦郑杰伦侯东芝肖莎
电子测试 2022年19期
谢宇,宋其江,王梦,郑杰伦,侯东芝,肖莎
(东北林业大学机电工程学院,黑龙江哈尔滨,150040)
0 引言
国内城镇河道、湖泊、景观水域等存在许多塑料瓶、纸屑、树叶等漂浮垃圾,一方面极大影响生态环境,另一方面影响着人民生活质量。水域环境保护是需要常长期坚持的事情,目前的打捞方式主要以人工开小船打捞和大型打捞船两种。前者常用于狭小水域或经济落后地区,不但费时费力清理效果不佳而且容易出现安全事故。后者常用于大型水域如长江、海岸,体型笨重、噪声大易对环境造成二次污染。对于生活区、景区等需要长期维护的中小型水域的清理装置较少,这些水域的垃圾一般都是人工进行清理,工人高强度工作在人们乱扔垃圾和植物的自然落败物下清理效果并不理想。如何在不对环境进行二次伤害且不影响人民生活的基础上,高效率高质量地清理水域漂浮垃圾是需要解决的难题。现存的各种打捞船收集装置大多是传送带式,存在不够灵活、打捞不彻底的缺陷。针对以上问题,我们设计了一种以X型杆机构为主体的收集机构并与智能科技结合创造出一款全自动、高效率、低成本、灵活、环保的中小型水面垃圾清理装置。装置加入树莓派和单片机控制,实现智能化;以锂电池为动力来源,绿色环保;外观简洁小巧,可清理狭窄水域;收集机构灵活,效率高;工作无噪音,不影响人民生活。
1 装置整体介绍
本装置整体尺寸长1200mm,宽1200mm,高400mm,主要由浮筒、收集机构、丝杠升降机构、齿轮旋转机构、螺旋桨、垃圾储存箱等组成[3]。图1为由solidworks搭建的装置整体机械结构图。为了航行稳定,减少水面风浪影响,装置采用双体船结构为船身,由两个树脂泡沫浮筒组成。其包括动力系统、存储系统、收集系统和识别系统。

图1 装置整体机械结构
1.1 动力系统
装置通过24V12A的锂电池供电,既能提供装置运动所需能源,又符合绿色环保的理念。在垃圾储存箱尾部装有两个杆,两个T60螺旋桨推进器安装在杆的端部。螺旋桨通过电机产生推力,前进时,左旋逆时针,右旋顺时针;后退时则相反。此螺旋桨加入电调控制两个螺旋桨的转速以实现转向。为了实现不同时机的完整运动,设置了两种控制方式,航模遥控器控制和通过单片机发送PWM信号实行控制。
1.2 存储系统
为了配合垃圾收集后能顺利倒入垃圾储存箱,选择将垃圾储存箱挂在两浮筒之间,储存箱是用尼龙材料加工而成,尺寸为长600mm、宽400mm、高560mm。储存箱为长方体结构,板上有小孔漏空,可过滤垃圾携带的水分。
1.3 收集系统
整个收集系统由收集机构、丝杠升降机构和齿轮旋转机构组成。收集机构可进行长度伸缩和上下倾斜角度调节。丝杠升降机构可以使收集机构进行上下滑动。齿轮旋转机构可使整个收集机构进行180°旋转。这样的设计可以使收集系统更加的灵活,提高收集效率。
收集机构是以X型杆机构为主体,由爪子、轴承、旋转轴等配合设计而成。X型杆机构的材质为铝合金,由12个X型杆、4个b杆组合体和2个c杆组成。X型杆由两个带孔杆件通过铆钉连接构成[2],左右臂各有6个X型杆。X型杆与b杆之间通过c杆连接。由于直接控制X型杆伸缩比较复杂,于是设计一对爪子,一端与X型杆相连,另一端固定在旋转轴上。这样复杂的X型杆机构的伸缩运动可转化为调节爪子开合角度。X型杆机构最短可收缩至450mm,最多能伸长至800mm。同时爪子可以通过轴承绕旋转轴旋转调节X型杆机构的倾斜调度。寻找垃圾时,将X型杆机构收缩至最短能减少阻力,从而加快装置的运动速度也就是寻找垃圾的效率。
丝杠升降机构由丝杠、导轨、滑块等组成。为使收集机构能顺利收集垃圾且能根据实际情况在合适的高度收集垃圾,设置一个外伸杆和连接板将收集机构与丝杠升降机构上的滑块连接。当滑块相对于丝杠在导轨上运动时,收集机构会随之上下移动从而进行高度调节。调节高度的范围是0-700mm。
齿轮旋转机构由固定底座、圆盘底座、大齿轮、小齿轮,轴承等组成。固定底座与浮筒上的支撑板固定。圆盘底座固定在圆盘上与丝杠升降机构连接固定。当电机驱使小齿轮带动大齿轮旋转时,整个丝杠升降机构和收集机构随之一起旋转。原则上是可以旋转360°的,这里根据实际需要我们将电机控制调至180°旋转。
本装置将由以上三个机构共同配合运动完成垃圾清理。收集垃圾时,将根据垃圾量、垃圾大小、垃圾形态及垃圾位置等具体情况,通过控制爪子调整收集机构的长度和上下倾斜角度,通过丝杠升降机构调整收集机构的高度,经过实时调整后的X型杆机构可将相应位置绝大多数垃圾纳入收集范围。整个运动过程:X型杆机构略微向下倾斜并沿导轨下降潜入垃圾底部,爪子张合调整X型杆机构长度,随后再略微向上倾斜,同时X型杆机构沿导轨上升至顶部,此时垃圾已被收集,最后X型杆收集体随大齿轮旋转180°至垃圾储存箱上方,X型杆机构向下倾斜完成垃圾倾倒。整个收集机构都是镂空的,这使垃圾进入垃圾储存箱的之前进行了一次漏水,能使收集箱的承载量充分利用。表1收集系统的调整参数。图2为收集系统的机械结构。
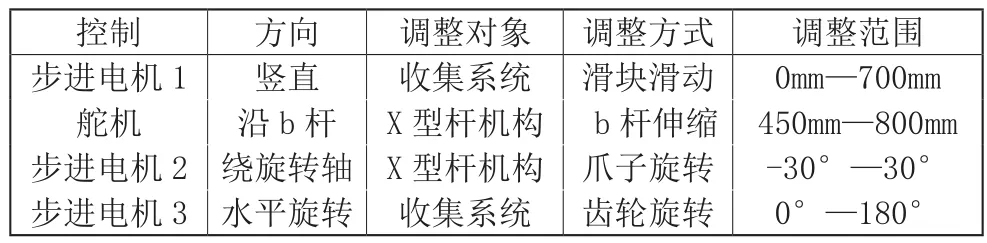
表1 收集系统调整参数
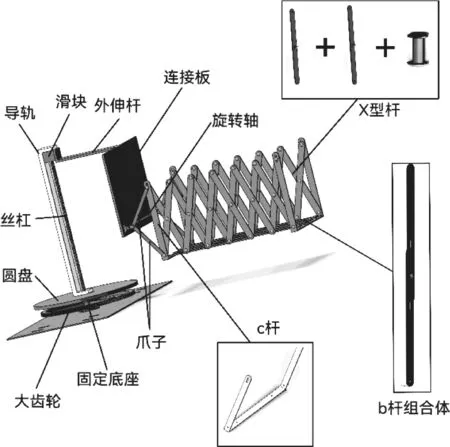
图2 收集系统机械结构
1.4 控制系统
树莓派,单片机为核心。通过树莓派控制视觉部分,单片机通过控制舵机从而控制X型杆收集体、垃圾收集箱、螺旋推进器运动,实现智能一体化[3]。本装置采用三个步进电机和一个舵机,四个电机都可以通过单片机发送PWM从而控制精确旋转角度,螺旋推进可以通过单片机控制,单片机发送一定频率和脉宽范围的PWM给电调,电调根据脉宽和设置控制电机[4]。螺旋推进器控制基本原理为电机为2216无刷电机,需要配置无刷电调才能启动,不能直接接电池,电调的频率为50Hz,脉宽范围是800us-2200us,中位是1500us,1500us-2200us是电机正转,800us-1500us是电机反转。
1.5 视觉系统
采用摄像头。摄像头识别垃圾,反馈信息到树莓派,树莓派确定垃圾位于水面的位置,反馈给单片机,树莓派通过串口与单片机IO口通讯,单片机控制船体自动前进并收集垃圾,适用于狭窄水面;或者摄像头识别垃圾后,反馈信息到通讯设备(手机或者电脑),通过遥控控制船体前进收集垃圾。[2]-[3]
2 工作流程
将各种参数调试好后放入需要清理的水域,两个螺旋桨推动机器开始巡航,通过摄像头实时监控水面垃圾情况,反馈信息相关系统。摄像头识别到垃圾后,通过单片机或者遥控器控制船体向垃圾处前进。[4]收集机构根据垃圾状态调整自身形态后将垃圾收集并倒入垃圾储存箱。重复前两步直至收集箱装满或人为停止收集垃圾。返航对垃圾储存箱垃圾进行分类处理后重新出发清理垃圾。图3为装置的工作流程图。

图3 工作流程图
3 结语
在水域环境日益变差和生活质量需要逐渐提高的今天,各景观水,城镇河道,小区湖泊等水域的漂浮垃圾急需清理且需要长期维护。该装置绿色环保、机动灵活、功能齐全、智能化高,十分适合这类水域里的垃圾清理,不仅能长期作业于这些水域完成垃圾清理工作而且装置外观尚可具备一定观赏性。
本装置的两大特点:(1)全新的收集机构——以X型杆机构为主体。由收集机构的不同形态对应装置两种运动形态:一是快速移动形态:X型杆收缩至最短可减少阻力方便移动,适用于垃圾较少水域,或单纯行驶而不收集垃圾时,比如返航;二是聚集垃圾形态:调整X型杆机构长度、倾斜角度和位置高度为适当的形态,便于垃圾清理,提高收集效率。X型杆机构的灵活性足以应对大部分垃圾,无论是在水域边缘还是狭窄水域都能轻易收集。(2)高度智能化且集两种作业模式一体。为应对特殊情况,我们设置了两种作业模式,全自动作业模式和半自动作业模式。全自动作业模式是装置通过机器视觉和程序指令自主寻找并清理垃圾。半自动模式是人工通过远程监控操作遥控器使装置完成垃圾清理。
本装置在被广泛使用后,不仅可以优化景观水,城镇河道,小区湖泊等水域环境,而且可以解放一部分人工劳动力,提高环境治理的智能化程度。因此,本装置拥有广阔的发展前景,具备一定的市场价值和实用价值。
猜你喜欢
机床与液压(2022年8期)2022-09-19
疯狂英语·爱英语(2020年12期)2020-12-29
汽车实用技术(2020年4期)2020-04-10
文史春秋(2019年11期)2020-01-15
环球市场(2017年6期)2017-09-10
商情(2017年4期)2017-03-22
农产品市场周刊(2016年43期)2016-12-23
农产品市场周刊(2016年43期)2016-12-23
南方文学(2016年3期)2016-06-12
电脑爱好者(2016年6期)2016-04-01
