
低信噪比环境下光斑图像信号的定位优化研究
2022-11-09 03:58左常玲
重庆科技学院学报(自然科学版) 2022年5期
李 伟 朱 敏 左常玲
(安徽三联学院 电子电气工程学院, 合肥 230601)
0 前 言
随着我国移动通信用户数量的激增,星地间待传输数据总量不断增长,导致星地空间通信信道拥塞现象加剧,这对移动通信系统的信息传输能力、效率、安全性等提出了更高的要求[1]。相较于传统的微波通信方式,光通信方式在信息传输能力、载波频率、信道带宽等方面有了质的飞跃[2-3]。此外,由于激光在传播过程中的可接受视场、束散角较小[4-5],因此光通信方式具有更强的空间定向能力、安全性和抗干扰能力。与传统的微波通信方式相比,光波通信的功率更大,拥有更强的远距离通信能力,同时还解决了传统通信设备功耗高、体积和重量大等弊端,极大地提升了移动通信能力[6-7]。由于束散角小,激光在远距离传输时信号定位会出现偏差[8]。为了保持通信链路的畅通,需要利用光电探测器精确地定位激光光斑图像的中心位置,及时调整偏差,以确保激光指向的准确性。
远距离通信条件下,受大气湍流影响[9],通信信道的信噪比较低,会进一步降低光斑图像的定位精度,导致光斑图像畸变,增加中心定位的难度和误差。因此,提高光斑定位精度是改善光通信效果的重要措施。目前,大多采用峰值法和质心定位法来解决激光光斑的定位问题。峰值法是以亮度最高点作为光斑中心来实现定位[10],该方法的算法简单、定位速度快、抗噪性能强,但如果光斑畸变程度较高,定位误差便会显著增大。质心定位法是在图像阈值分割基础上计算光斑图像质心[11],该方法定位误差较小、光斑对称性良好,但在低信噪比条件下受大气湍流的影响较大。为进一步提高定位精度,本次研究提出一种基于BP神经网络的方向定位法,通过调整网络权值和图像阈值来控制光斑中心定位偏差,以提升激光通信的稳定性。
1 低信噪比环境下激光光斑图像预处理
激光在大气中传播时极易受到大气湍流的影响,从而导致光斑中心定位的准确性降低。大气温度、压力的变化具有随机性,受空气热力学影响形成大气湍流,低信噪比环境下激光在传输过程中会发生偏移,光斑图像质量严重下降,进而影响激光通信效果。若要实现光斑图像中心位置的定位优化,就要去除环境噪声干扰,提高光通信的信噪比。
本次研究基于维纳滤波算法的去噪原理,处理已经退化的光斑图像,提取目标信号特征。含噪激光图像信号的计算公式如式(1)所示:
s(t)=f(t)+n(t)
(1)
式中:s(t) —— 含噪激光图像信号;
f(t) —— 原激光图像信号;
n(t) —— 噪声信号。
维纳滤波算法的目的是确保去噪前后信号之间的差值e(t)最小,如式(2)所示:
ε2=E(e2(t))
(2)
式中:ε—— 最小均值的期望。
维纳滤波器去噪过程如图1所示。图1中,H(t)和G(t)分别为滤波器的一阶降噪函数和二阶降噪函数;f′(t)为去噪后的激光图像信号。维纳滤波器具有较广的适用范围,可以处理不同类别的光图像信号,但需要在滤波过程中实时观测激光频谱的变化特征,避免破坏有用的图像信号数据。
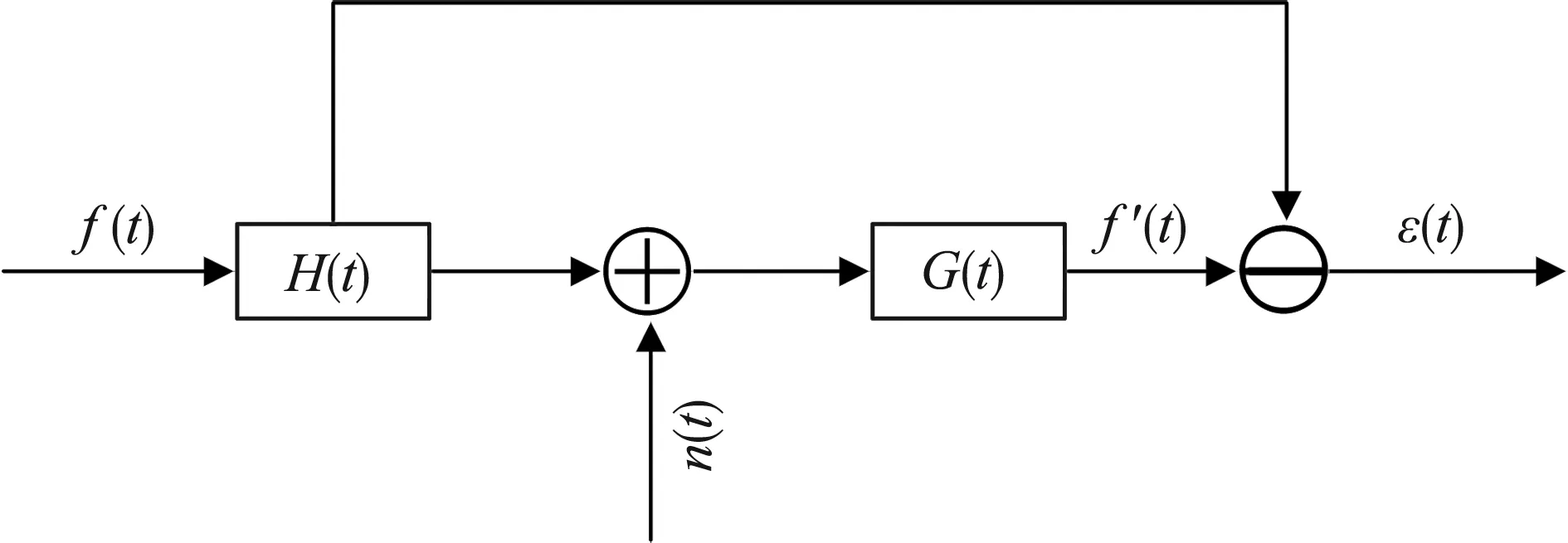
图1 维纳滤波器去噪过程
维纳滤波器去噪过程实质上是对含噪图像信号功率谱作平滑递归处理。
激光图像平滑功率谱的计算公式如式(3)所示:
η(t,k)=ζη(t-1,k)+(1-ζ)|φ(t,k)|2
(3)
式中:η(t,k) —— 激光图像平滑功率谱;
k—— 功率谱的频点;
ζ—— 常数,通常取0.7;
|φ(t,k)|2——f′(t)的功率谱。
维纳滤波器具有较好的激光图像去噪性能,可以保留更多的激光图像细节特征。
激光图像的一个重要特点是光斑区域的灰度值显著高于背景的灰度值,尤其是在低信噪比环境下,灰度差过大会干扰光斑图像定位。本次研究采用最大类间方差法(OTSU)来选定最佳灰度阈值,基于激光图像背景和光斑部分之间的比例关系,以及灰度特征阈值进行图像分割。类间方差值越大,图像主体与背景之间的差别越明显。
激光图像背景和光斑部分出现的概率如式(4)所示:
(4)
式中:P0(T) —— 激光图像背景部分出现的概率;
P1(T) —— 激光图像光斑部分出现的概率;
l—— 图像灰度级;
T—— 目标阈值;
pi—— 灰度级i出现的概率。
激光图像背景和光斑部分的灰度均值如式(5)所示:
(5)
式中:U0(T) —— 激光图像背景部分的灰度均值;
U1(T) —— 激光图像光斑部分的灰度均值
p0—— 激光图像背景部分出现的初始概率;
p1—— 激光图像光班部分出现的初始概率。
(6)
激光图像背景和光斑部分之间的类间方差σ2(T)如式(7)所示:
σ2(T)=P0(U0-U)2+P1(U1-U)2
(7)
式中:U—— 激光图像的灰度值。
采用两次快速标记法标记光斑图像像素的分布情况,给定一个初始值并提取像素点分布特征,将其作为光斑图像信号定位的基础数据。在第一次标记时,记录各像素点之间的相对位置,判断当前像素点是光斑像素点还是背景像素点。若像素点是孤立的,则单独标记;若通过像素点的阈值和灰度值判断出其是背景像素点,则剔除干扰项并提取剩余像素点特征,将其作为后续判断的基础条件和光斑图像信号定位的依据。第一次定位后可能会遍历掉一些前景像素点的关键特征,因此需要按照一定的逻辑顺序对全部激光图像像素点进行二次遍历。
遍历后,激光图像背景和光斑部分的灰度均值如式(8)所示:
(8)

U1′(T) ——遍历后的激光图像光斑部分灰度均值。
若光斑图像标的物像素点集合中存在背景像素点,则用最小像素值予以标记,直到所有激光光斑图像全部扫描完成。假如光斑图像和背景图像之间的连通区域过大,则需要适当降低遍历速度或延长遍历时间,以便于激光光斑图像信号的特征提取。
2.2 光斑图像信号的定位与优化
加强对激光光斑图像信号中心位置的定位,是提高光通信效果的关键步骤。在大气湍流等恶劣条件的影响下,信噪比环境持续恶化、畸变程度增大,严重干扰了光通信效果。因此,应根据光斑的畸变程度和光斑图像特征确定质心位置。当信道中数据量过大且信噪比较低时,特征之间的内在连接机制会变得更加复杂。为此,本次研究采用BP神经网络算法对激光图像像素特征集作加权处理,并利用神经网络模型强大的数据训练能力控制定位误差,加强输入信号与输出信号之间的联系,降低大气湍流的影响,从而提高光斑图像信号中心定位的准确率。
BP神经网络模型能够模拟人脑神经元的工作方式,对输入模型的数值进行训练和判定,使输出的结果接近于期望值。BP神经网络模型采用误差反向传播的方法,调整权值和阈值,重新修订中间隐含层的数量、数据学习和训练的规则,使输出值的误差平方趋近于最小值。
BP神经网络模型结构如图2所示。BP神经网络模型包括输入层、隐含层和输出层,通过对输入数据进行训练和多次迭代来降低光斑中心位置的定位误差。在数据训练过程中,首先求解BP神经网络模型中隐含层的权值导数,以便于控制隐含层数据的反向传播;其次,通过调整权值改变对输入数据的赋权,优化训练过程和反向传播过程,降低输入值和输出值之间的误差;最后,输出值的光斑中心定位误差层层降低,光通信效果得到改善。
BP神经网络模型可以视为输入变量为xn、输出变量为ym的非线性函数。其中,n为输入变量的数量;m为输出变量的数量;η为调节参数,负责调整输入变量的权值。
隐含层是神经网络的核心层和数据训练层,节点i的输入项Xi如式(9)所示:
(9)
式中:xj—— 隐含层的第j项数据;
wij—— 输入项和隐含层之间的权重比例;
θi—— 干扰项。

图2 BP神经网络模型结构
节点i的输出项Yi如式(10)所示:
(10)
此时,输出变量的误差函数ε(t)如式(11)所示:
(11)
式中:μ(t) —— 函数的期望向量。
隐含层的数量可依据输入数据集的复杂程度来确定。利用隐含层的数据训练能力,将输出结果的误差分摊到不同的神经元组织上,并逐步修正神经元的权限制。BP神经网络模型在初始化后设定系统最大迭代次数,赋值区间为[-1,1],选择初始样本x(t):
(12)
隐含层中第i个神经元的输入值hi(t)与输出值ho(t)如式(13)所示:
(13)
式中:κi—— 第i个神经元对应的常数。
输出层中第i个神经元的输入值yi(t)与输出值yo(t)如式(14)所示:
(14)
基于BP神经网络模型的激光光斑图像中心定位的偏导数δo(t),是由实际偏差和期望偏差的差值决定的,如式(15)所示:
(15)
重新调整中心定位偏导数与隐含层神经元之间的权值关系,并判断当前误差是否满足输出值的要求。权值调整可以与数据训练同步完成,调整的计算成本与隐含层的数量成正比。通过隐含层的训练和迭代不断缩小隐含层的权值偏差,在预先设定好的迭代次数范围内观测隐含层的训练结果与期望结果之间的差值。BP 神经网络模型的优势在于其强大的数据训练能力,可以根据数据集的规模自行调整隐含层的数量、算法的代价和耗时。在大气湍流影响下,激光传播的照度条件趋于恶劣,光斑的中心位置、峰值位置、质心位置等都会发生变化。在经过隐含层的训练后,输入数据误差值逐渐趋近于零,实际输出向量也趋近于理论值,光斑图像定位精度得到了提升。为了进一步提高激光光斑图像的定位精度,对多帧图像求平均值后再求和或作高斯拟合,从而提升输出结果的精度。
3 实验结果与分析
为验证光斑图像中心定位算法的有效性和准确性,在实验室环境下仿真激光通信场景。选择Intel Corei7处理器,最高主频为3.6 GHz,运行内存为16 GiB,存储内存为2 TiB,操作系统为Windows 10专业版,激光相机的曝光时间为500 μs,激光形成的光斑大小为15 mm×15 mm。
在信噪比为100 dB(常规信噪比)的环境下,分别采取本算法、峰值法和质心定位法提取激光光斑,结果如图3所示。在常规信噪比环境下,本算法与两种传统定位算法提取的激光光斑图像相近,边缘光滑,亮度均匀。

图3 常规信噪比环境下激光光斑效果的对比
在信噪比为65 dB(低信噪比)的环境下,分别采取本算法、峰值法和质心定位法提取激光光斑,结果如图4所示。在低信噪比环境下,本算法提取的光斑图像亮度均匀且边缘光滑,而峰值法提取的光斑图像亮度不均,质心定位法提取的光斑图像边缘较模糊。

图4 低信噪比环境下激光光斑效果的对比
基于Matlab仿真环境,模拟信噪比为65 dB(低信噪比)的环境下,激光光束载波信号的传播情况,观测本算法和两种传统算法下光斑中心位置在X轴和Y轴的偏移量变化情况。观测周期为210 s,各算法下激光光斑在X轴和Y轴的偏移量如图5和图6所示。
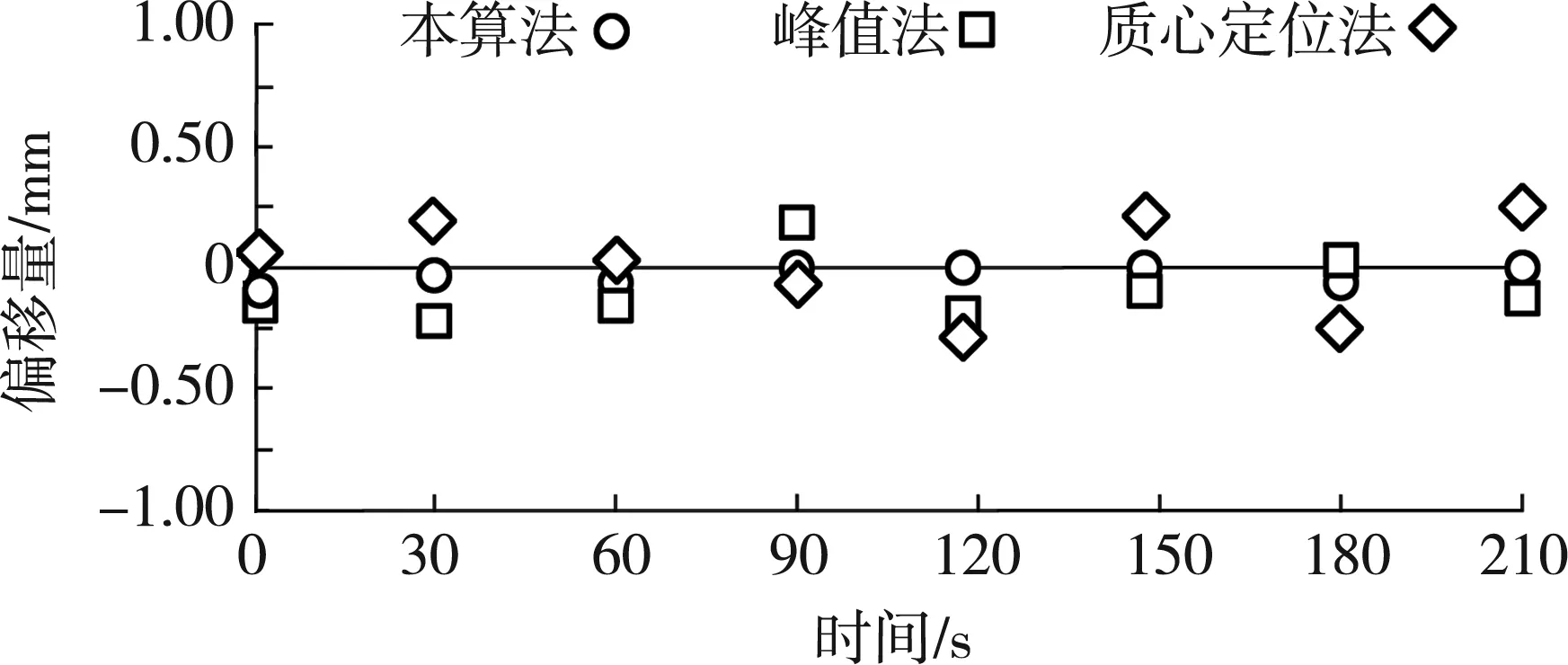
图5 各算法下激光光斑在X轴的偏移量
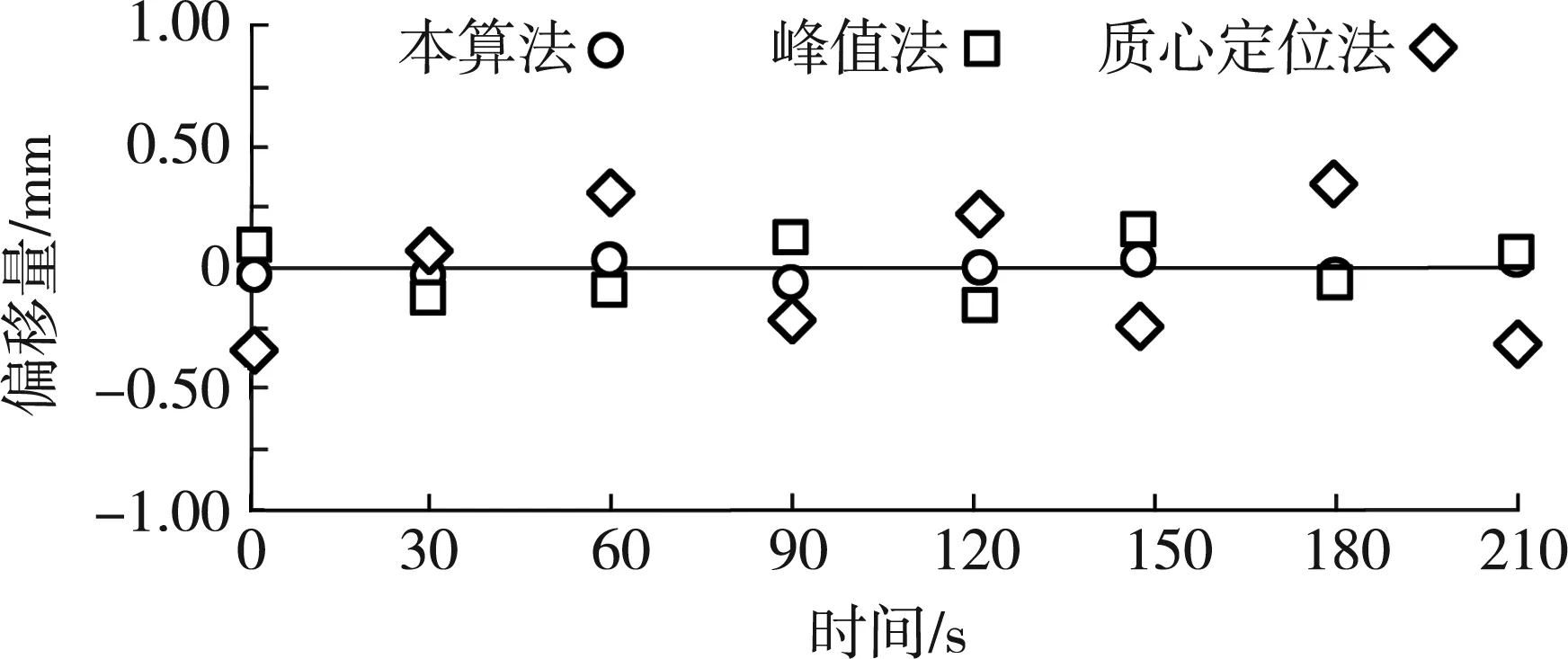
图6 各算法下激光光斑在Y轴的偏移量
仿真结果显示,基于BP神经网络模型的光斑定位算法提取的激光光斑在X、Y轴的偏移量均较小且趋近于零。这表明在BP神经网络模型隐含层的数据训练下,输出量的误差值不断缩小,激光光斑定位的准确性得到提高。基于峰值法提取的激光光斑在X轴的偏移量较大,最大超过了0.2 mm。基于质心定位法提取的激光光斑在Y轴的偏移量较大,最大达到0.4 mm,直接影响到激光光斑图像信号有效特征量的提取。由3种算法的类间方差值变化情况(见表1)可知,峰值法和质心定位法获取图像的类间方差值平均为0.202 9和0.312 3;而本算法获取图像的类间方差值平均为0.019 7,显著低于两种传统算法。

表1 3种算法的类间方差值变化情况
4 结 语
激光通信在信道容量、数据传输速率等方面具有明显的优势,但在低照度条件下受大气湍流等因素的影响,激光传播方向、光斑定位精度等会发生负面变化。本次研究构建了一种包含多个隐含层的BP神经网络模型,通过控制隐含层的数量和输入数据的反向传播速度,缩小理论输出值和实际输出值之间的差值,降低激光光斑中心定位偏差,从而提升光通信效果。仿真结果显示,相较于传统光斑中心定位算法,本算法在X、Y轴的偏移量和类间方差值的控制方面具有较为明显的优势。
猜你喜欢
诗歌月刊(2023年1期)2023-03-22
现代仪器与医疗(2022年1期)2022-04-19
现代电子技术(2021年1期)2021-01-17
阅读(高年级)(2019年9期)2019-11-15
北京航空航天大学学报(2019年9期)2019-10-26
阅读与作文(小学高年级版)(2019年8期)2019-10-16
上海大学学报(自然科学版)(2018年5期)2018-11-02
电脑知识与技术(2018年35期)2018-02-27
雷达学报(2017年3期)2018-01-19
自动化学报(2017年11期)2017-04-04
