
基于Kalman滤波的改进灰色模型在基坑变形监测中的应用
2022-11-08 11:22:10刘国超彭卫平朱晓强
城市勘测 2022年5期
刘国超,彭卫平,朱晓强
(1.广州市城市规划勘测设计研究院,广东 广州 510060; 2.广东省城市感知与监测预警企业重点实验室,广东 广州 510060)
1 引 言
随着城市化进程的快速推进,大城市人口规模的快速增加,使得城市土地愈发紧张,建筑设计向上要空间,使得楼层越来越高,基坑越挖越深,建筑规模越来越大,随之而来的工程沉降、工程塌陷问题愈发突出。高层建筑一般位于城市核心地带,基坑规模大,周边环境复杂,施工引起的沉降问题不容忽视,如果发生险情可能引发投资增加、工程安全或人员伤亡等一系列问题。基坑监测作为验证基坑设计、保护基坑施工的主要手段,可以直观反映基坑在各种施工工况、岩土体卸荷载状态下的变化情况,通过对监测数据的分析和预测,可以为后续设计和施工提供有益指导[1]。
基坑监测数据由于其离散性、高噪声等特点,使得监测数据呈现一定的波动性、随机性,为了对基坑的稳定状态及变形趋势做出更加准确的分析,国内外学者做了很多有益尝试。文献2中介绍了新陈代谢GM(1,1)模型在建筑物沉降数据预测中的应用,相比于传统的GM(1,1)模型和多项式拟合模型,精度提高明显[2];文献3中建立了基于卡尔曼滤波的灰色理论预测模型,利用迭代滤波理论和LevenbergMarquardt优化滤波,有效提高了预测精度[3];文献4中系统阐述了自适应卡尔曼滤波在变形监测数据处理中的应用,并探讨了不同自适应卡尔曼滤波模型的不同应用领域[4];文献5中详细讨论了离散线性系统的卡尔曼滤波模型建立及精度评定,并将其应用于大坝动态变形监测中[5]。以上探索和尝试,为变形监测分析和预测提供了丰富工具,本文拟采用Kalman滤波+新陈代谢GM(1,1)模型组合方式,利用Kalman滤波对原始监测数据滤波消噪,并结合新陈代谢GM(1,1)模型对变形趋势项进行建模分析,来预测变形趋势。结合实际案例分析,基于Kalman滤波的新陈代谢GM(1,1)相比于传统的单一GM(1,1)、ARMA模型[6-7],有效降低了观测噪声影响,并具有更高的预测精度。
2 基于Kalman滤波的新陈代谢GM(1,1)模型
2.1 Kalman滤波模型
Kalman滤波是一种利用线性系统状态方程,对系统状态进行最优估计的一种算法,能有效剔除测量数据中随机扰动误差,得到接近真实情况的测量数据。其数学模型包括状态方程(也称动态方程)和观测方程两部分:
Xk=Φk/k-1Xk-1+Wk-1
(1)
Lk=HkXk+Vk
(2)
式中,Xk是tk时刻系统的状态向量;Lk为tk时刻系统的观测向量;Φk/k-1为时间tk-1至tk的系统状态转移矩阵;Wk-1为tk-1时刻的动态噪声;Hk为tk时刻的观测矩阵;Vk为tk时刻的观测噪声。
离散的线性系统Kalman滤波递推公式为:
状态预报:
(3)
状态协方差阵预报:
Pk/k-1=Φk/k-1Pk-1+Qk-1
(4)
状态估计:
(5)
状态协方差阵估计:
Pk=(I-KkHk)Pk/k-1(6)
其中,Kk为滤波增益矩阵,其具体形式为
(7)

2.2 GM(1,1)模型
灰色模型是通过少量的、不完全的信息,建立数学模型并做出预测的一种方法,是黑箱概念的推广,通过分析系统各因素之间是否具有确定关系来区别白色与黑色系统,进而建立数学模型,并做出预测。
设观测原始序列:
x(0)={x(0)(1),x(0)(2),x(0)(3),…,x(0)(N)}
对x(0)作一次累加生成(1-AGO),得到:
(8)
从而获得生成序列:
x(1)={x(1)(1),x(1)(2),x(1)(3),…,x(1)(N)}
设x(1)满足:
(9)
其中,常数u称为发展灰数,a为内生控制灰数,是对系统的常定输入。通过最小二乘估计可得:
(10)

(11)
2.3 Kalman滤波与GM(1,1)模型组合及算法实现
Kalman滤波能有效剔除测量数据的随机项,得到接近真实情况的测量数据;新陈代谢GM(1,1)模型可以对监测数据趋势项进行建模,以预测变形趋势。本文拟采用Kalman滤波+新陈代谢GM(1,1)模型组合方式,利用Kalman滤波对原始监测数据滤波消噪,并结合新陈代谢GM(1,1)模型对变形趋势项进行建模分析,来预测变形趋势。
首先采用Kalman滤波对监测数据进行滤波,剔除监测数据中的随机扰动误差,然后对剔除了随机项的监测数据进行GM(1,1)建模。针对灰色系统随时间推移,预测精度与可靠度不断下降的问题,本文拟通过将已经获取的最新已知信息引入模型,淘汰作用弱的信息,淡化灰平面的灰度,以降低模型精度的损失,准确反映系统状态。

图1 基于Kalman滤波的改进灰色模型算法流程
3 算例分析
广州城区某高层建筑,基坑周长约 600 m,开挖深度 16 m,基坑等级为一级。为监测基坑施工过程中的变形情况及周边影响,在基坑及周边建筑布设若干监测点,本文选取基坑桩顶某竖向位移监测点14期数据作为实验数据,通过前10期数据建立模型,预测后4期数据,并与实际监测数据对比,其中每期监测间隔为7天,监测数据如表1所示。

表1 某监测点部分沉降数据
这里选取前4个数据为观测值,定△t=1,组成法方程进行动态平差,采用线性拟合y=a0+a1x+ε,得到状态协方差阵和状态估计参数。利用上面的递推预报与滤波公式可得到监测点的滤波值,如表2所示:
由表2可知,卡尔曼滤波通过建立状态方程和观测方程来描述系统的动态过程,依据滤波增益矩阵的变化,从监测数据中定量提取有效信息,修正状态参量,从而补偿噪声对数据的影响,有效提高数据处理精度。以滤波值为基础,建立新陈代谢GM(1,1)模型,并预测后4期数据,并分别对于传统GM(1,1)模型、ARMA模型进行对比,结果如表3所示。
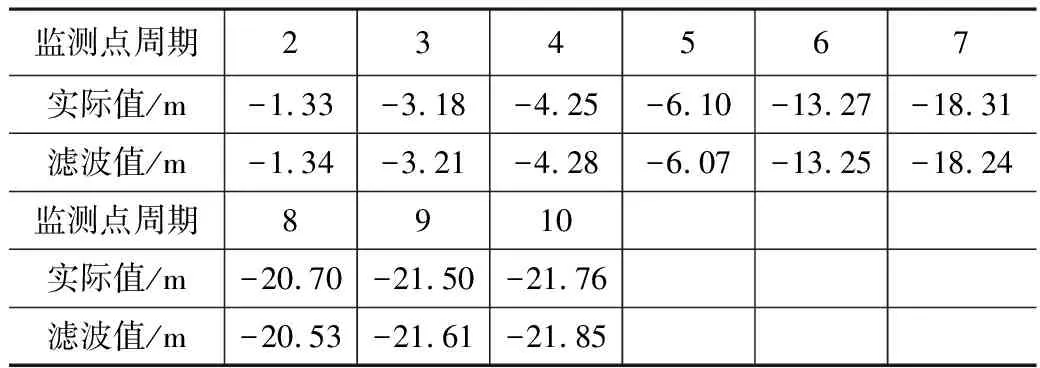
表2 Kalman滤波值与预测值

表3 基于Kalman滤波的改进GM(1,1)与传统GM(1,1)、ARMA预测值比较
由表3,图2可知,经卡尔曼滤波处理后的改进GM(1,1)模型具有更高的预测精度,能更好地反映变形趋势,相比于单纯GM(1,1)模型和ARMA模型精度更高。
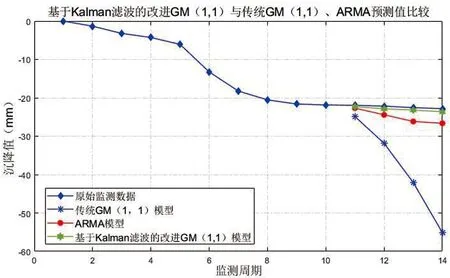
图2 基于Kalman滤波的改进GM(1,1)与传统GM(1,1)、ARMA预测值比较
由表4可知,对比三种模型的预测值、残差值的均方差及中误差,基于Kalman滤波的新陈代谢GM(1,1)相比于传统的单一GM(1,1)、ARMA模型,有效降低了观测噪声影响,并具有更高的预测精度。

表4 三种模型预测精度对比
4 结 论
卡尔曼滤波通过建立状态方程和观测方程来描述系统的动态过程,依据滤波增益矩阵的变化,从监测数据中定量提取有效信息,修正状态参量,从而补偿噪声对数据的影响,有效地提高数据处理精度,结合新陈代谢GM(1,1)模型对变形趋势项进行建模分析,来预测变形趋势。相比于传统的单一GM(1,1)、ARMA模型,有效降低了观测噪声影响,并具有更高的预测精度。但是在使用上述模型时,也要注意以下几点:
(1)Kalman滤波初始值的选取很关键,错误的初始值不能很好反映数据变化趋势;
(2)Kalman滤波的优势在于能实时反映数据变化状态,并通过新数据来更新状态方程,通过增益矩阵来控制观察数据噪声的影响,对提高数据预测精度有很好的效果;
(3)新陈代谢的GM(1,1)模型通过加入新的已知信息,剔除旧的无效信息,来提高预测精度,但也易受到突变信息、粗差信息干扰,导致预测不准。使用模型时,需对新加入的数据做一定的判别和分析。
猜你喜欢
铁道通信信号(2019年11期)2019-05-21 03:05:56
北京航空航天大学学报(2017年9期)2017-12-18 07:12:25
电源技术(2016年9期)2016-02-27 09:05:39
电源技术(2015年1期)2015-08-22 11:16:28
空间控制技术与应用(2015年3期)2015-06-05 14:30:31
遥测遥控(2015年2期)2015-04-23 08:15:18
振动工程学报(2015年1期)2015-03-01 01:15:42
全球定位系统(2015年4期)2015-02-28 12:38:12
电测与仪表(2014年3期)2014-04-04 09:08:32
电子设计工程(2014年20期)2014-02-27 12:01:00
