浅谈机载激光雷达技术在水利工程测量中的应用
2022-11-08 12:54:08朱万虎
广东水利水电 2022年10期
朱万虎
(广东珠荣工程设计有限公司,广州 510610)
1 概述
水利工程测量贯穿于水利工程勘察、建设、运营全过程。在勘察阶段需提供高精度地形图,建设施工阶段需精密放线及土方测量,运营阶段需进行变形监测。目前传统水利工程测量还是用全站仪进行放线、监测,RTK进行地形测量,传统测量中需配置大量的人力物力,作业效率低,工作时间较长,并受地形环境因素影像较大,为测量工作带来许多困难。随着科技的发展,无人机特别是低空无人机已经慢慢走向各行各业。低空无人机操作简单、易学易掌握、对天气和起飞降落场地要求低、智能化程度高[1],在无人机上搭载激光雷达不仅能获取清晰的影像还能获取高密度地面三维点云,真实还原地貌特征。
国内诸多测量工作以项目为载体,围绕机载激光雷达进行了研究,如付伟锋[2]以河道堤防测量为列阐述了固定翼搭载激光雷达在河道堤防测量中的应用;凌晨阳[3]等在施工土方测量中分析了机载激光雷达技术在复杂地形土石方测量中的应用;刘圣伟[4]等以滑坡监测为例研究了机载激光雷达技术在长江三峡工程库区滑坡灾害调查和监测中的应用;王伟鹏[5]等以森林调查为列阐述了机载激光雷达在森林资源调查中的应用与展望;王珂[6]以电力线测绘为列阐述了机载激光雷达技术在电力工程测绘中的应用;余铸[7]等在大区域机载激光雷达森林资源调查监测中,通过冠层垂直结构分类后建模有助于提高森林参数估测精度;吕富强[8]等基于密度噪声应用空间聚类算法的机载激光雷达建筑物点云提取与单体化;李红林[9]分析了机载激光雷达在河流调查中的应用。综上所述,机载激光雷达技术已应用于各行各业,其成果是稳定可靠。相对于河道堤防、施工土方测量、滑坡监测等测量场景植被覆盖相对稀疏,本文研究的海南省南渡江谷石滩水电站增建鱼道测量项目树林茂密,地貌复杂,并且采用大疆禅思L1激光雷达进行机载扫描测量,解决现场测量更多的问题,所积累的经验更具有参考与借鉴价值。
2 机载激光雷达测量技术概述
机载激光雷达系统集成了GNSS、IMU、激光扫描仪、数码相机等光谱成像设备。其中GNSS提供实时定位服务,IMU提供高精度惯导,激光扫描仪利用返回的脉冲可获取探测目标高分辨率的距离、坡度、粗糙度和反射率等信息,数码相机能获取高清晰的影像资料,最后经过软件系统处理而得到沿一定条带的地面区域三维点云与成像结果[10]。
机载激光雷达是主动发射激光,探测地物回波特征而确定地表的信息数据,不受天气及太阳光照影响,理论上可以进行24 h不间断数据采集,对于应急和气象条件差的地区的作业比较有利,并且激光能够穿透薄的云雾,获取目标信息,其激光脚点直径相对较小,具有多次回波特性,能够穿透枝叶间的细小空隙,得到树干、树枝、地面及地面低矮植被等多种高程数据,有效克服植被影响,精确探测真实地形地面的信息。
3 机载激光雷达技术在水利工程测量的实践应用
水利工程测量中测区一般地形起伏大、植被茂密,特别是水库、电站工程一般都修建在人烟稀少地区,传统外业测量难度比较大,危险源比较多,如何保证质量与安全的情况下完成工程测量任务,需要采用新技术新手段,机载激光雷达是最好选择。以海南省南渡江谷石滩水电站增建鱼道测量项目为例,阐述机载激光雷达技术在水利工程测量的应用。
本项目主要测量内容为1/1 000谷石滩水电站及周边地形测量,测区面积为1.5 km2,植被覆盖茂密大部分为15 m高橡胶林,测区最大高差为100 m,地形最大坡度为70°,项目上采用大疆M300无人机搭载大疆激光雷达禅思L1镜头进行机载扫描测量(如图1所示)。

图1 大疆M300无人机搭载激光雷达禅思L1镜头示意
3.1 航飞准备
无人机激光雷达航测在作业前要对测区范围进行巡视,检查高压线,地形起伏等情况,然后进行航线规划、相控布设及测量。本测区地形起伏较大,为保证数据精度均匀采集数据时需要仿地飞行,应提前用摄影镜头先飞一个粗略的DSM影像,为后续仿地飞行中规划航线做准备,本项目用大疆P1镜头,航线高度200 m先进行地面摄影测量,再用大疆智图快速处理生成带粗略高程数据的DSM影像为无人机仿地飞行做准备。大疆M300在平面上可进行免相控作业,但高程上暂还不能保证精度,还需地面做少量地面相控点控制精度,本项目相控均匀分布测区,大概间距为500 m,地面喷绘“L”形,测量采集外角。
3.2 航飞数据采集
现场航飞时选好合适的起飞点主要保证遥控器和飞机的通讯信号,由于激光雷达原理是激光回波,与普通航测不一样不局限于关照强度,阴天和晚上都可以起飞。在选好起飞点后首先遥控器上规划航线,本项目航线参数设置为仿地航高90 m(L1镜头根据其性能航高一般设置为80~120 m),航速为8 m/s(一般不超过10 m/s),重叠率50%(平原地区重叠率可降低),遥控器中雷达参数回波模式设置为三回波(多回波穿透效果更好),采样频率设置为160 kHz,扫描模式为重复扫描,模型上色功能打开。遥控器规划航线时可同时打开飞机电源键,飞机上的RTK模块尽早得到固定解,飞机挂载的雷达禅思L1镜头需静置5 min进行预热。由于本次执行的是仿地任务,航线高度可能比起飞点高度还低,为确保安全需先手动操作无人机飞行至安全高度再上传任务,飞机按照规划航线自动完成航线任务并在航线起始点进行惯导校准(见图2),飞行时注意遥控器与飞机的通讯,并时刻观察雷达L1镜头实时采集的点云数据是否正常。
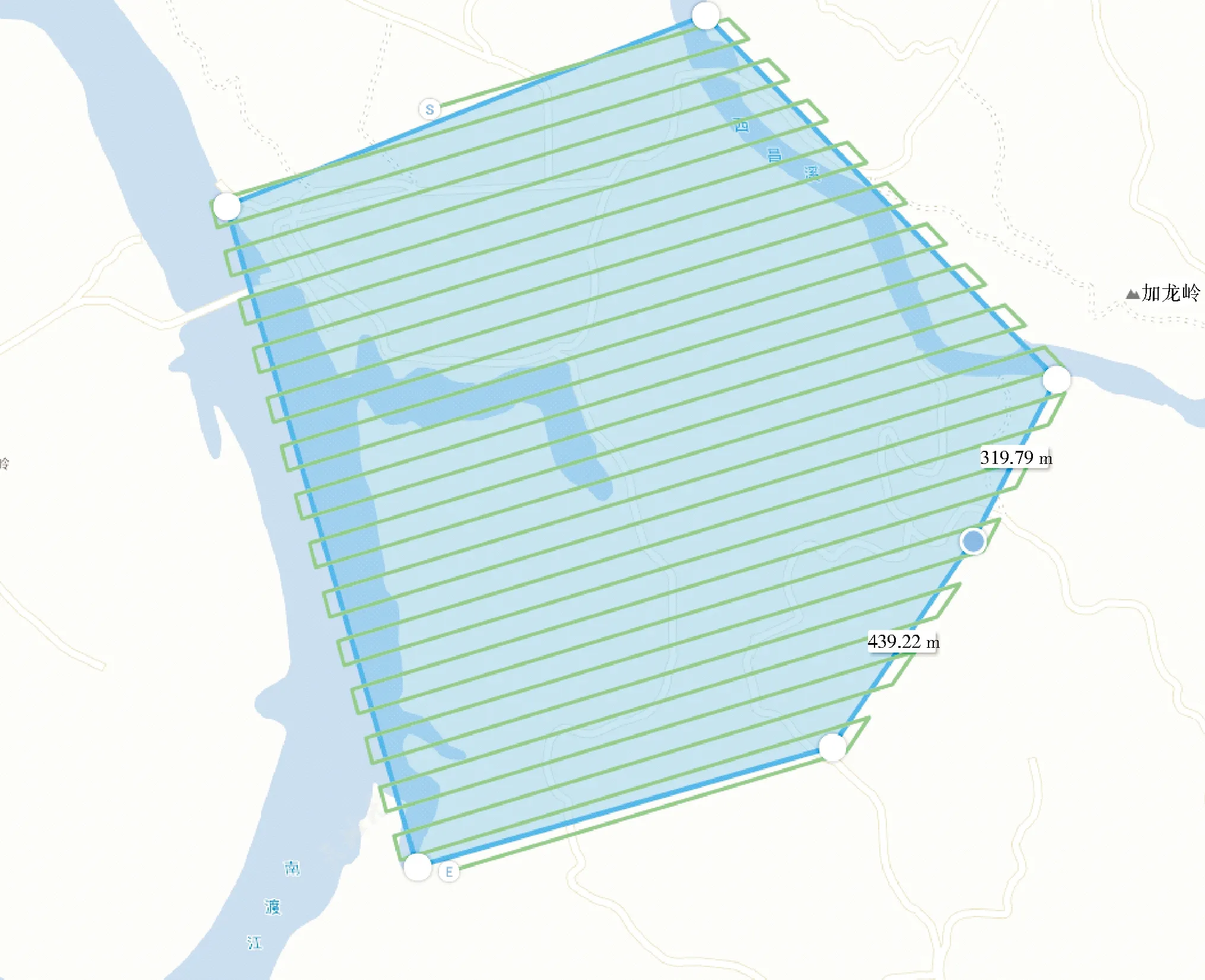
图2 无人机航线规划示意
3.3 数据处理
飞行任务完成,将镜头里的SD卡取出,在电脑中读取DCIM的文件,打开大疆智图软件,在新建任务里选择激光雷达点云处理,添加飞机导出的文件,选择工程项目的坐标系,在参数设置中要打开点云精度优化,重建结果选择las及PCD格式,然后点击开始处理,等待点云成果生成(见图3),蓝色部分为第1次回波,绿色部分为第2回波,红色部分为第3次回波,可以看到3次回波将树木茂盛的地区地面绝大部分都反射了出来。
将大疆智图生产的las文件导入到数字绿土LiDAR360软件中对数据进行滤波、去噪,并利用前期做的相控进行坐标、高程的转换,获取每一个激光点正确的空间坐标,根据现场地形实际情况设置合理的地面点提取参数,根据规范的成图规定自动生成所需高程点及等高线,将大疆智图生产的PCD点云文件导入山维科技EPS三维测图软件进行建筑物及地物的绘制,导出来的数据统一在CAD软件编辑处理即可完成1幅完整的数字化地形图(见图4)。

图3 机载雷达扫描的3次滤波数据示意
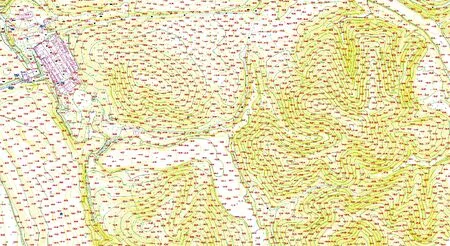
图4 谷石滩水电站局部地形示意
3.4 平面精度分析
根据《水电水利工程测量规范》规范,应用全站仪进行实地采集建筑物轮廓点数据与机载激光雷达生成的地形图上建筑物轮廓位置进行对比分析(见表1~表2),由表1和表2可见,激光雷达数据平面精度满足规范要求[11]。

表1 水电水利工程测量规范地形图上地物点
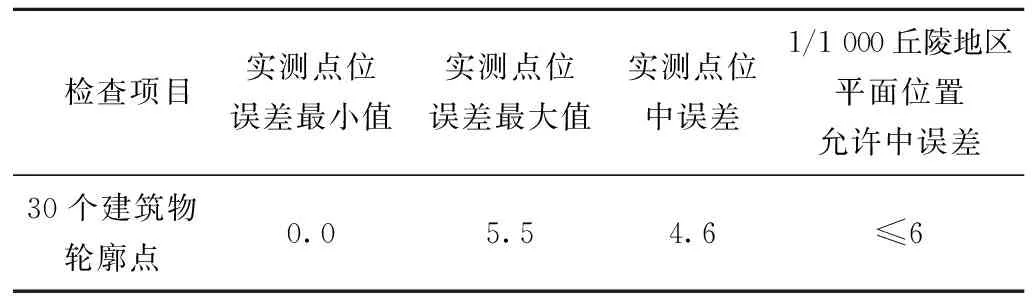
表2 激光点平面位置精度统计 cm
3.5 高程精度分析
根据《水电水利工程测量规范》规范,用全站仪进行实地数据采集硬质裸露地形点及山地树林下高程点与机载激光雷达生成的地形图上高程点进行对比分析(见表3~表4),由表3和表4可见,激光雷达数据高程精度满足规范要求[11]。

表3 水电水利工程测量规范高程注记点精度 m

表4 激光点高程精度统计 m
3.6 项目总结
本次完成1/1 000谷石滩水电站及周边地形测量约面积为1.5 km2,投入人力为2人,时间为2 d,工程车1辆。若采用传统RTK结合全站仪进行地形测量,投入2人,完成时间约需10 d。从工作效率上比较,机载激光雷达的效率比传统测绘至少高了5倍;从测绘人员安全比较,本项目测区树林中毒蜂、毒蛇、山蚂蝗较多,环境恶劣,采用机载激光雷达技术大大降低了测绘外业危险系数。
4 结语
水利工程测量中,机载激光雷达技术只需少量地面控制即可完成定位,节省了大量外业工作量且减少了外业安全隐患,对于无人区等困难区域的数据采集非常有利并且处理数据的软件自动化程度都很高,只需要极少时间和少量人工编辑就能完成。从目前技术能力和生产实践来看,机载激光雷达技术能够满足生产1∶1 000 比例尺及一些平原地区更大比列尺的产品精度要求,但山区及一些隐蔽点要求10 cm以下乃至毫米级的精度,对于机载激光雷达技术而言实现还比较困难,山区植被对激光的穿透性有一定的影响,相对航高一样的情况,植被越密集的地方,地面上的激光点越少,反之就越多,地面激光点越多成图精度也就越高[12],项目生产中一定要根据雷达镜头的参数及树林的茂密程度选择合适的航高进行扫描测量。
猜你喜欢
北京测绘(2023年1期)2023-02-23 13:25:10
汽车观察(2022年12期)2023-01-17 02:19:38
北京测绘(2022年5期)2022-11-22 06:57:43
计算机应用文摘·触控(2021年20期)2021-11-11 01:43:05
汽车观察(2021年8期)2021-09-01 10:12:41
计算机应用文摘(2021年20期)2021-05-30 18:27:46
小哥白尼(神奇星球)(2021年12期)2021-03-08 09:22:56
中国交通信息化(2019年1期)2019-03-26 06:43:46
电子制作(2018年16期)2018-09-26 03:27:00
太空探索(2016年5期)2016-07-12 15:17:58