
一种基于RGB多通道的高动态范围三维测量方法
2022-11-07 07:27专宇浩伏燕军黄奕亮周鹏许钟汇凯
江西科学 2022年5期
专宇浩,伏燕军,黄奕亮,周鹏许,钟汇凯
(南昌航空大学测试与光电工程学院,330063,南昌)
0 引言
条纹投影技术因其速度快、精度高等一系列优点广泛应用于很多领域,包括逆向工程、质量控制和工业设计等[1-4]。然而在工业生产中,由于测量对象表面反射率过高或过低,导致相机捕获的图片像素饱和或者是信噪比较低,对测量精度造成很大的影响。因此,如何获得高动态范围(HDR)表面物体的精确三维数据仍是一个急需解决的问题。
为了解决这个问题,一些国内外专家和学者进行了大量的研究,并提出了不同的解决方法[5-6]。Zhang[7]提出了一种基于不同曝光时间的高动态范围(HDR)三维测量技术,通过合成不同曝光时间下不饱和且最大光强的一系列条纹图案来实现,但这种方法所需要的图片较多。Jiang[8]提出了一种自动选择曝光和投影条纹强度的方法,但是需要投影更多图像,会影响测量速度。Chen[9]试图通过偏振滤光片去除镜面反射光,以避免相机过饱和,但对于较暗的视场,由于调制度较低,容易引起较大的误差。Waddington and Kofman[10]提出了一种方法,通过改变局部投影强度来避免投影光强的局部饱和。首先投影密度最高的图像,提取出过饱和区域,通过投影垂直和水平条纹图像得到的绝对相位与投影仪上的区域进行匹配;然后,对低密度图像进行投影,利用最小二乘法计算出捕获图像中过饱和区域对应区域的自适应强度;最后,对自适应强度图进行投影,实现HDR三维测量。该方法减小了像素饱和引起的误差,但局部强度变化不能满足过饱和区域内每个像素的需求。Feng[11]等提出了一种自适应的HDR条纹投影技术。这种方法是基于表面反射率分布的直方图来预测物体不同的最佳曝光时间,这个过程可以自动产生曝光时间来提高自动化性能,但是这种用于预测曝光的直方图聚类分布不适用于反射类别分布不明显的物体。
综上所述,对于高动态范围三维测量大多采用多重曝光的方式,会极大影响测量效率。本文利用彩色相机通道特性,通过一幅彩色图片获取3幅强度不同的条纹图片,从而达到多重曝光的目的。同时,利用π相移背景归一化傅里叶变换轮廓术去除背景光强的干扰,并且不受物体表面反射率的影响,能有效恢复静止或动态具有高反射率物体的三维形貌。
本文其余部分结构如下。第1部分介绍彩色相机单镜头多通道融合技术原理与π相移背景归一化傅里叶变换轮廓术。第2部分通过实验验证方法的可行性。第3部分总结全文。
1 原理
1.1 条纹投影技术系统
测量系统模型如图1所示,测量系统由投影仪、彩色相机和计算机组成。相位高度公式由式(1)表示[12]:
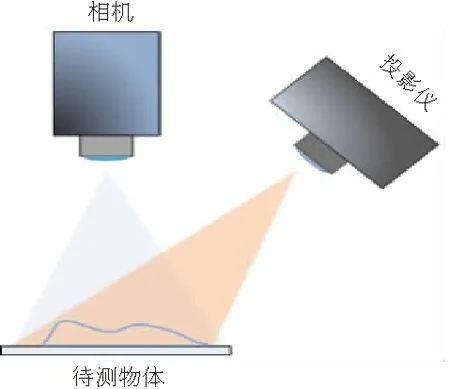
图1 测量系统示意图
(1)
利用投影仪投影编码好的条纹图,由彩色相机捕获变形条纹,进而得到相位信息,结合标定的参数即可计算出物体的实际高度,从而恢复三维形貌。
1.2 彩色相机单镜头通道融合技术原理
彩色相机具有红(R)、绿(G)、蓝(B)3个通道,并且3个通道的光强不相同,这是由相机内部的拜耳阵列所决定的[13-15]。如图2所示,彩色相机的拜耳阵列将相机像素分为红(R)、绿(G)、蓝(B)3个通道。因为拜耳滤波器的对于波长具有选择性,所以3个通道的量子效率曲线随波长不同而不同,即3个通道的响应曲线不同。在单色光照条件下,将拜耳阵列看作是一个像素变化中性密度滤波器。比如在投影单色蓝光条件下,红(R)、绿(G)、蓝(B)3个通道响应曲线如图3所示,其中eb>eg>er,3个通道响应曲线的不同,对光强的敏感度也不同,其中红色通道衰减最强,能接受到非常高的亮度且不会过曝,而蓝色通道衰减较低,对低亮度更加敏感。通过这个特性,能利用一幅彩色相机得到的图片分离出3种不同强度的图片,完成一幅图片的通道复用功能。
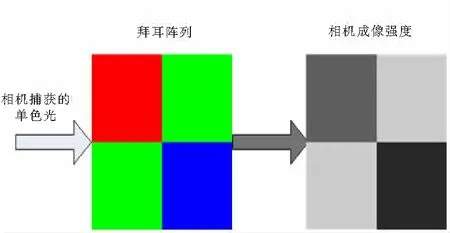
图2 彩色相机单镜头多通道成像技术原理图
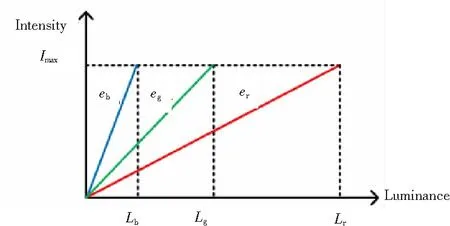
图3 RGB三通道灵敏度曲线示意图
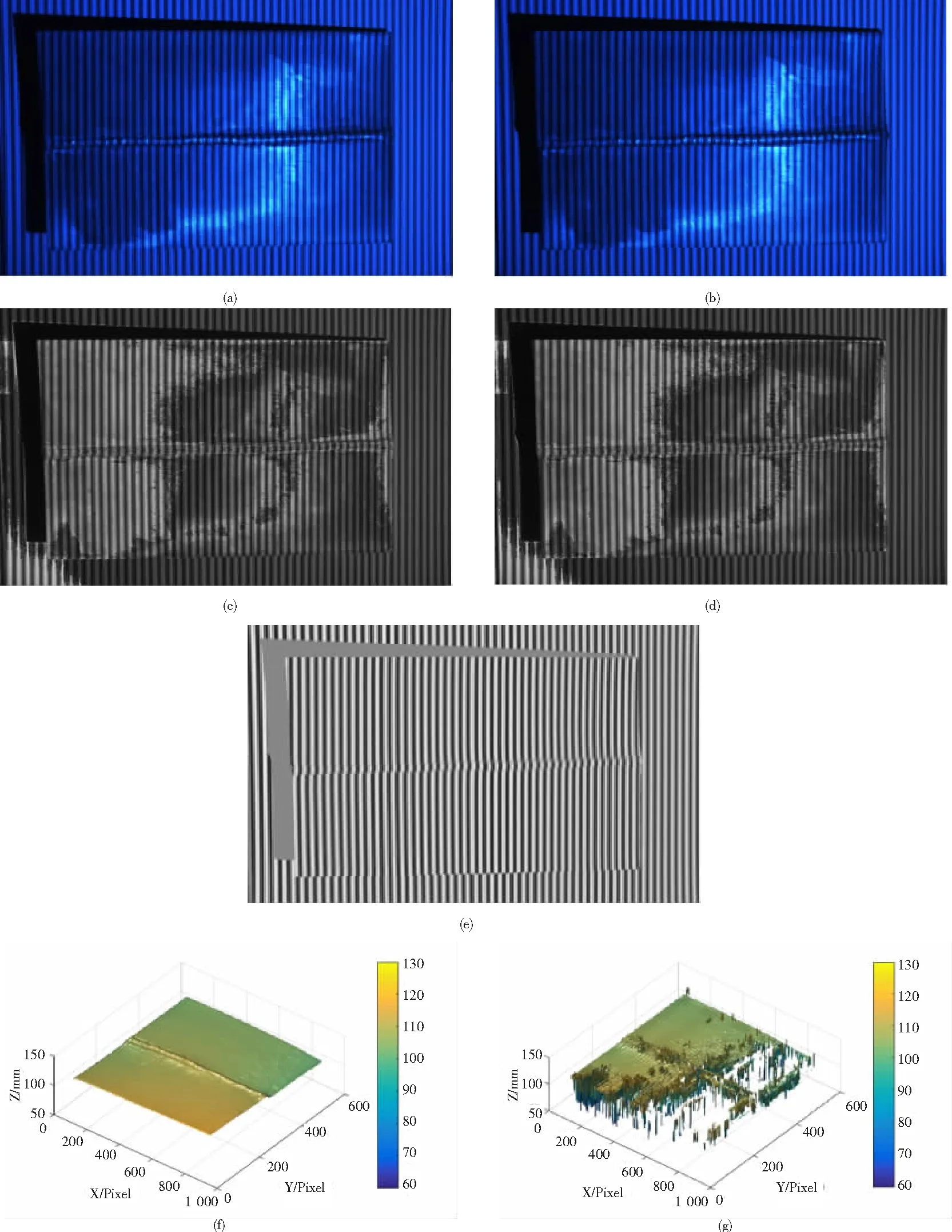
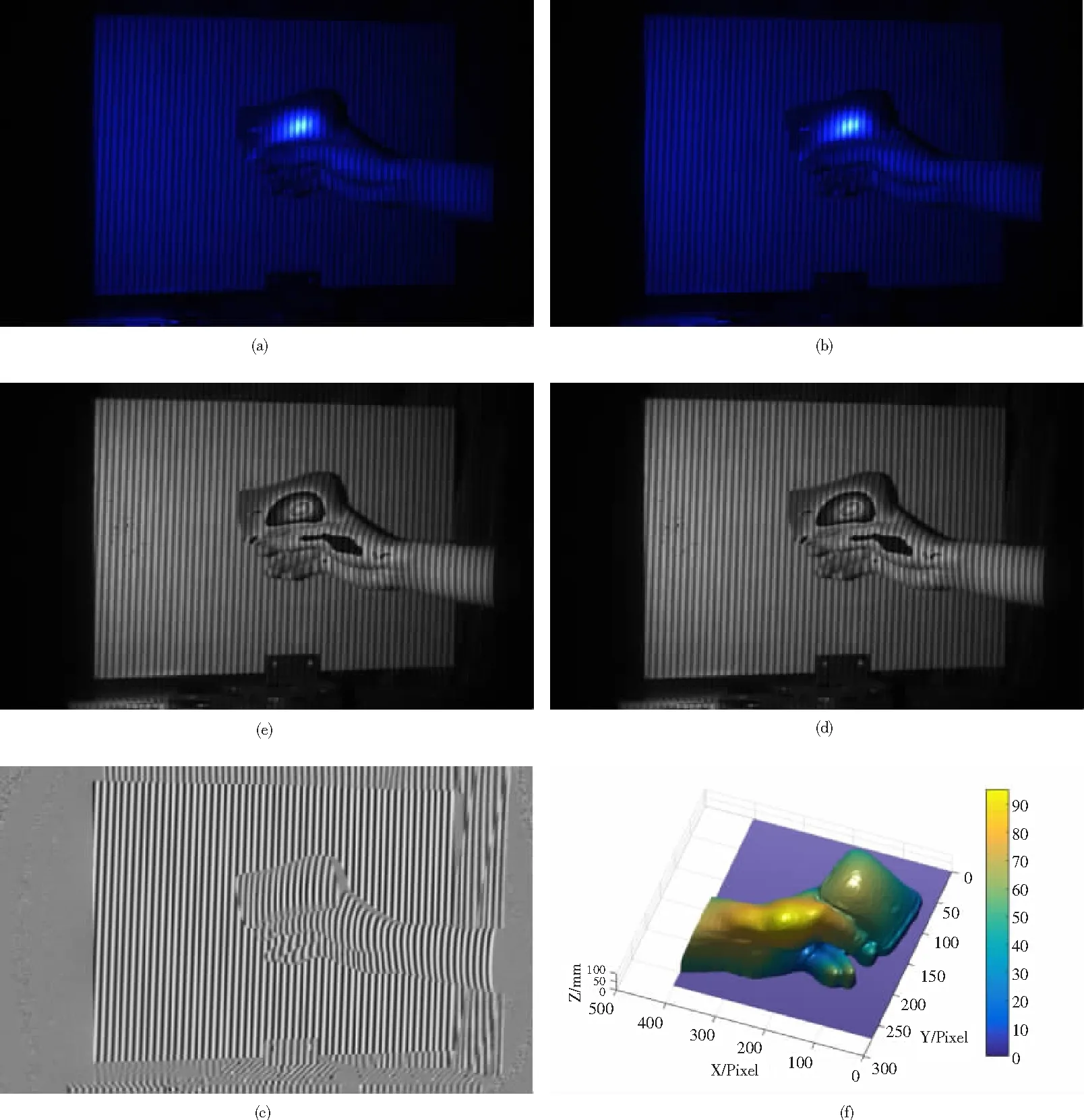
投影仪设置投影蓝色的条纹图,因为蓝色光对于环境光的敏感性更低,能减少环境光对测量造成的影响,然后通过彩色相机捕获条纹图案。利用彩色相机R、G、B 3个通道的特性,可以分别分离出3张光强不一样的条纹图Ir,Ig,Ib,由于相机特性,按照光强排序可得Ir (2) 其中maskb(x,y)、maskg(x,y)、maskr(x,y)分别为蓝(B)、绿(G)、红(R)3个通道的掩模值,能标记出3个通道像素饱和的区域。再利用下列公式可得融合后的HDR条纹图: (3) 传统的傅里叶变换轮廓术只需要一张正弦条纹图片就能够获取被测物体的相位值,常常被用在动态测量中。但是因为只用了一张图片,当被测物体边缘不连续或者表面反射率很高的情况下,会发生频谱混叠现象,无法分离出正确的基频分量,就无法得到准确的相位信息,导致测量出错,这不利于测量高反射率的物体。本节提出一种π相移背景归一化傅里叶变换轮廓术。这种方式有效去除了背景光强的干扰,并且不受物体表面反射率的影响,很容易用带通滤波器分离出正确的基频分量。并且对于高反射率表面物体非常有效。 在这种方法中,假设投影仪投影黑色为0,投影白色为1,那么投影2张π相移的正弦条纹图案表示为: (4) 将这2张图片投影到被测物体上,用相机捕获,那么相机捕获到的2张正弦条纹表示为: (5) (6) (7) 其中Id(x,y)是归一化后得到的条纹强度。γ是一个极小的数,来防止分母为0。上式可以改写成: (8) 整体方法流程由图4来表示,首先投影2幅π相移的条纹图案到被测物体上,用相机捕获到的2幅条纹图案分别为图4(A1)和(A2),它们之间的相移量为π。然后再利用彩色相机的RGB三通道对光强的响应不同,将1幅条纹图分离成3幅强度不同的条纹图。(R1)、(G1)、(B1)分别为图4(A1)分离出来3个通道的图片。(R2)、(G2)、(B2)分别为图4(A2)分离出来3个通道的图片。再利用公式(3)将3个通道融合起来,分别得到了(M1)和(M2)2个HDR的条纹图。通过公式(7)进行归一化处理。得到了归一化的条纹图(N)。选择合适的滤波器进行滤波操作获得对应的基频信号,然后将其移到原点处,随后通过傅立叶逆变换得到基频信号的空域分布。通过反三角函数获得截断相位。利用外差法[16]获取连续相位,最后恢复三维形貌。 图4 方法流程图 实验测量系统由DLP投影仪(DLP LightCrafter 4500,分辨率:1 140×912)、彩色相机(Daheng MER-230-168-U3C,分辨率:1 920×1 200)和高性能计算机构成。为了验证方法的有效性,设计了以下实验来进行验证。首先测量了一个具有焊缝的铝板。它的表面具很高反射率,容易导致像素饱和,引起测量误差。测量实验如图5所示,实验需要投影3组(每组2张)不同频率的条纹图获取三维形貌,图5中的(a)、(b)是第一组。这3组的频率分别为64、63和56。 (a)第1幅拍摄条纹图;(b)π相移后第2幅条纹图;(c)与(d)分别表示(a)与(b)三通道融合后的HDR条纹图;(e)表示背景归一化后的条纹图;(f)本方法得到三维形貌图;(g)常规傅里叶变换轮廓术方法得到三维形貌图图5 具有焊缝的铝板测量结果 由图5中的(f)和(g)可知,传统的傅里叶变换轮廓术方法测量具有高反射率表面的物体时会存在较大误差,而本方法能有效测量具有高反射率表面的静态物体。为了验证本方法同样适用于动态物体,本文对测量人员手持一个具有高反射率表面鼠标的动态瞬间进行测量。测量结果如图6所示,实验结果表明本方法能有效测量运动的高反射率物体。 图6 (a)、(b)是实拍的2张条纹图;(c)、(d)分别是(a)和(b)三通道融合后的图;(e)是(c)和(d)背景归一化获得的条纹图;(f)本方法恢复的三维形貌图 本文提出一种基于RGB通道的高动态三维测量方法,利用彩色相机通道特性获取得到最亮且像素不饱和的区域融合得到HDR条纹图,然后将2组HDR条纹图归一化成一幅去除背景光与反射率影响的条纹图,然后获取三维形貌。实验证明该方法能有效测量静止或运动的具有高反射率表面的物体,并且最多只需要投影6张条纹图,能有效减少投影图片数量,增加测量效率。1.3 π相移背景归一化傅里叶变换轮廓术


2 实验
3 结论
猜你喜欢
印制电路信息(2022年11期)2022-11-30
海洋通报(2022年4期)2022-10-10
光谱学与光谱分析(2022年4期)2022-04-06
数学物理学报(2021年1期)2021-03-29
新疆大学学报(自然科学版)(中英文)(2020年2期)2020-07-25
小福尔摩斯(2019年2期)2019-09-10
学生天地·小学低年级版(2019年5期)2019-06-05
学生天地(2019年15期)2019-05-05
小学生必读(低年级版)(2019年9期)2019-04-13
小学生必读(低年级版)(2019年10期)2019-04-13
