
基于视觉感知的某纯电动车辆车道保持系统设计
2022-11-07 02:16李敬斌
汽车电器 2022年9期
李敬斌
(江淮汽车集团股份有限公司,安徽 合肥 230601)
随着智能辅助驾驶技术不断进步,车道保持系统(Lane Keeping System,LKS)在某些国外品牌车型应用越来越多,由于车道线检测、路径跟踪以及主动转向等关键技术尚不成熟,纯电动整车的匹配及验证能力还不充分,使得国内自主品牌的应用车型较少,同时,作为智能辅助驾驶L3级目标必经阶段,进行车道保持系统技术设计研究,提升系统整车匹配能力对于最终攻关纯电动汽车智能辅助驾驶L3级目标具有显著的促进作用。
本文涉及的车道保持系统是基于纯电动车辆机器视觉感知,并在具有主动转向功能的电动助力转向系统(EPS)基础上进行开发。系统通过获取车身状态和车路相对位置信息,对驾驶员驾驶状态与意图进行判断,当车辆即将偏离车道且驾驶员无操作时,车道保持系统通过电动助力转向系统纠正车辆的偏离行为,防止车辆跑偏,避免发生横向碰撞事故。
1 车道保持系统设计方案
本车道保持系统采用基于目标转角控制方案,通过设计车道保持人机交互控制策略和模式切换策略,最终逐步实现面向高速公路、小曲率弯道等特定工况下的自动驾驶的车道保持功能。车道保持系统架构图如图1所示,主要包括以下几点。
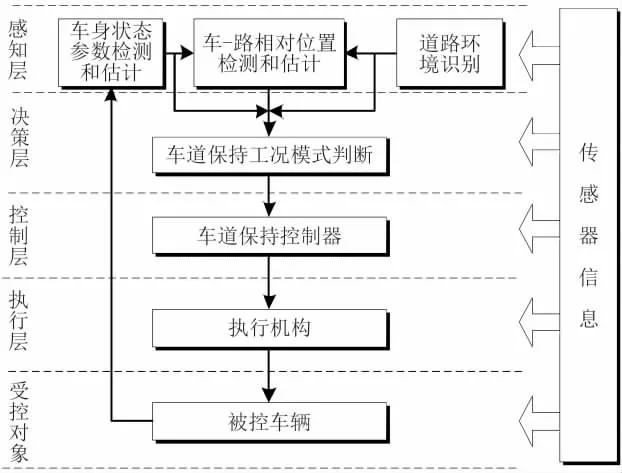
图1 车道保持系统示意图
1)感知层:①主要由各类传感器组成,进行车辆状态参数采集,包括方向盘转角、车速和横摆角速度等信号;②外部传感器进行周围环境的检测,主要是对车道线的识别的简单处理;③还有其他传感器负责对驾驶员是否介入车辆控制的监测。最后基于这些信息进行车路相对位置检测和估计。
2)决策层:基于车辆状态和驾驶员动作监测(如驾驶员的力矩、踏板信号等),判断驾驶模式是继续处于车道保持模式还是退出此模式。当监测到驾驶员介入时,交还车辆控制权给驾驶员。
3)控制层:主要依据感知层获得的信号进行处理,基于模型预测控制(MPC)算法计算纠正车辆偏差所需要的理想转角。
4)执行层:主要由电机控制器、电机和转向机构组成。当处于车道保持时,电机控制器基于理想转角控制电机带动转向机构进行主动转向,实现转角跟踪。
车道保持系统总流程图如图2所示。车道保持系统激活时,感知层利用各种传感器获取车身状态参数以及进行周围环境检测(主要包含车道线检测),从而通过计算获取车辆与道路之间的相对位置。决策层依据感知层的信息,进行模式判断,判定车辆行驶状态。当判定车辆处于车道保持工况时,当发生车辆偏离,控制层能根据感知和决策层所得到的偏差,通过合适的控制算法获取合适的控制信号(期望转角)。控制信号传递给转向执行系统,主动控制方向盘转向,从而实现对车辆的控制,实现车道保持功能。
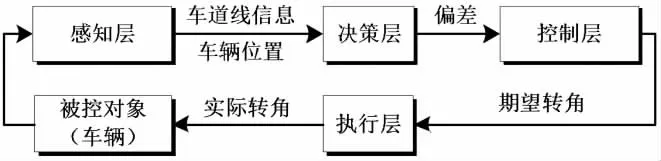
图2 车道保持系统总流程图
2 硬件设计方案
车道保持系统硬件主要由视觉感知单元(视觉传感器)、车身状态传感器和方向盘转角转矩传感器、车道保持控制器、主动转向执行机构以及与车辆状态信号连接的网关组成,车道保持系统硬件架构设计如图3所示。
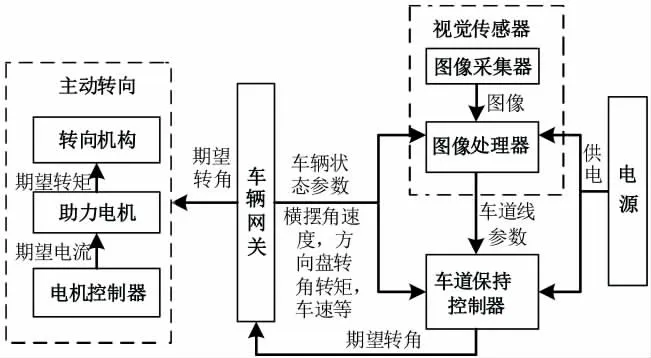
图3 车道保持系统硬件架构图
2.1 视觉感知单元设计
视觉感知单元(视觉传感器)主要由摄像头图像采集器、图像处理器、MCU控制核心组成,采用基于单目摄像头的目标识别方案,能够提供车道线、前方车辆、路标标志、前方光源等相关信息,见图4。
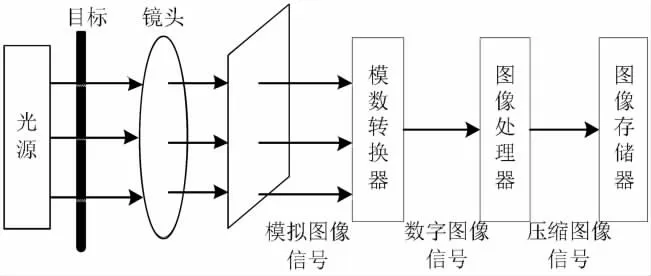
图4 视觉传感器的组成
视觉感知单元主要功能是获取足够的机器视觉系统要处理的最原始图像。图像传感器是视觉检测的核心部件,主要作用是将镜头所成的图像转变为数字信号输出,并对数字信号进行处理,依据目标物特征提取目标;图像存储器用于存储待处理的图像文件等;MCU是进行运算的核心部件单元,采用Freescale的Qorivva MPC560xP微控制器设计。
2.2 车道保持控制器设计
车道保持控制器使用ControlBase_VT,对传感器信号和执行器信号进行集中管理,对所设计的控制算法进行快速验证,它支持硬件在环测试、台架测试和实车测试。MCU采用MC9S12XEP100,底层驱动库为SimuQuest公司的QuantiPhi,无缝集成入Matlab/Simulink环境中,可将车道保持系统的程序代码一键自动生成,在控制器中烧写程序后,可进行快速仿真和实车试验验证,见图5。
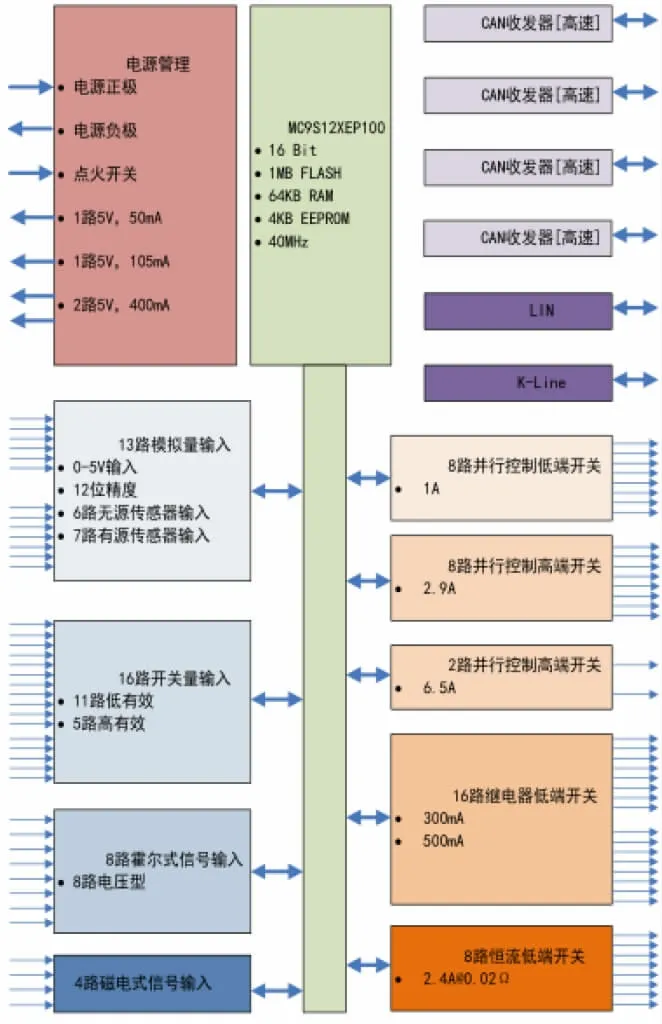
图5 硬件模块图
ControlBase_VT硬件接线图见图6。ControlBase_VT的通信模块提供4路CAN总线、1路LIN和1路K线。4路CAN总线均为高速CAN总线,其传输速率可达1Mb/s。
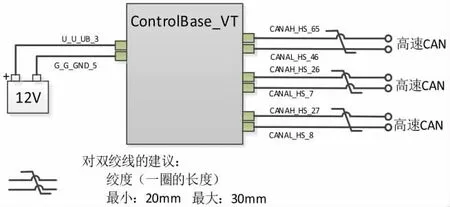
图6 ControlBase_VT硬件接线图
2.3 软件设计
软件按照AUTOSAR架构设计,车道保持软件算法主要涵盖车道线检测模块、横向控制模块以及人机交互模块。车道线检测模块主要基于机器视觉对车辆前方的道路车道线进行检测识别,确定车辆所要行驶的路线。横向控制模块基于MPC算法采用横摆角速度闭环控制得到期望方向盘转角实现对车辆的横向控制。人机交互模块主要用于实现对驾驶员行为的监测,及时进行车辆控制权的切换。
2.3.1 车道线检测模块
车道线检测模块软件设计流程如图7所示。
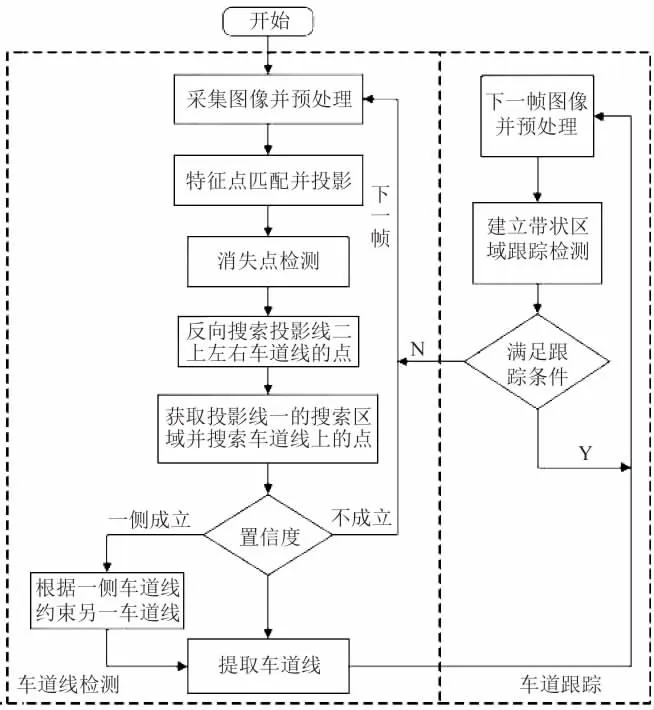
图7 车道线检测控制逻辑流程图
1)采集车辆环境图像信息。
2)根据车辆环境图像信息确定消失线位置、感兴趣区域、匹配的车道线宽度的最大值和最小值。
3)根据消失线位置、匹配的车道线宽度的最大值和最小值在感兴趣区域内进行边缘检测并搜索满足车道线特征搜索条件的特征点。
4)对满足车道线特征搜索条件的特征点往消失线以及预设的两条车道水平线上进行投影,并在消失线上寻找消失点。
5)根据消失点位置进行反向搜索,提取车道边界线的特征点,并根据车道边界线的特征点确定车道线。
6)根据车道线建立带状区域,并利用置信度约束车道线位置和宽度。
2.3.2 横向控制模块
横向控制模块分为信号接收模块和方向盘转角计算模块两个子模块。其中,信号接收模块执行CAN信号接收功能,接收来自环境感知层的车辆相对于预瞄点的位置及方位偏差信号,以及接收车身传感器采集的车辆横摆角速度和质心侧偏角信号。方向盘转角计算模块基于MPC(模型预测控制)控制器设计,以信号接收模块的接收信息为输入,MPC控制器输出追随理想道路中心线所需的横摆角速度,经过PID控制后得出所需的前轮转角θ,再转化为理想方向盘转角θ后作为模块的输出。
横向运动控制算法仿照驾驶员的行为方式在即将经过的前方道路中心线中获取道路位置信息,称之为预瞄距离和预瞄点的选取;预瞄距离就好比是驾驶员向前方观察路径时所观察的距离,而预瞄点就是在预瞄距离处所获取的位于道路中心线上的路点,并以此分析预瞄点到期望轨迹的横向偏差。通过当前车辆位置相对于预瞄点处的横向位置偏差和方位角偏差以及车身传感器的数据,通过MPC控制算法,就可以得出使车辆追随理想道路中心线所需的理想横摆角速度。对横摆角速度理想值θ和实际值θ的偏差进行PID控制,并根据车辆逆动力学模型得出前轮转角在每个控制周期所应当得到的姿态修正值(理想值)θ。将这一前轮转角理想值由弧度制转化为角度值后,再经过传动比转化,就可以得到使车辆追随理想道路中心线所需的方向盘转角值,横向控制逻辑流程图如图8所示。
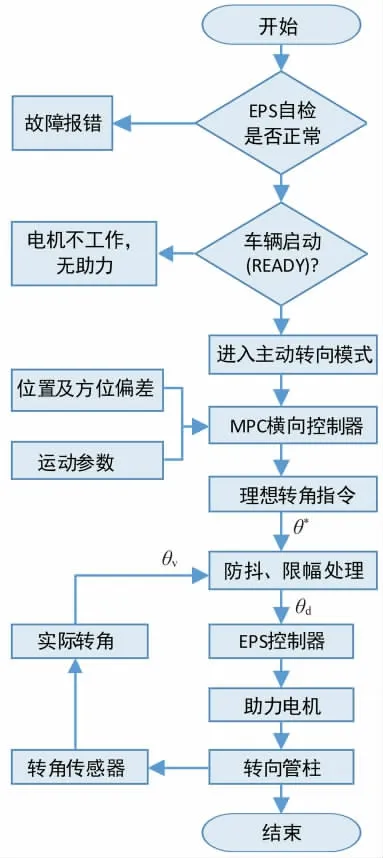
图8 横向控制逻辑流程图
2.3.3 人机交互模块
对于配置有智能辅助驾驶系统的车辆,需要设计一定的人机交互进行车道保持的进入和退出模式切换。
2.3.3.1 进入车道保持状态判断
当车辆处于非车道保持状态时,可通过一个开关量进行切换进入车道保持状态,进入车道保持状态判断逻辑流程图如图9所示。
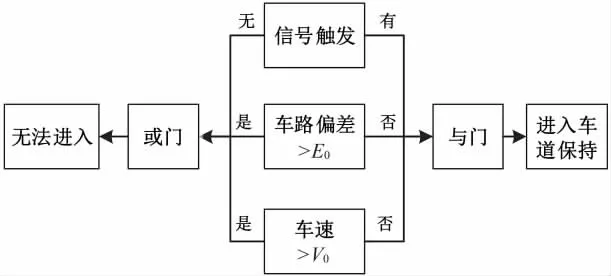
图9 进入车道保持状态判断逻辑流程图
为了保证顺利平稳且安全地进入车道保持状态,需添加一些限制条件。
1)需要保证车路相对姿态偏差在一定范围内,这样可以防止方向盘实际值与期望值相差过大而导致进入车道保持模式时转向速度过大,车辆不稳定且调整时间过长。
2)当车速较大时,若路况不好或其他不可控因素等,进入车道保持模式是不安全的,低速下进入车道保持模式,会让人在心理上有安全感。
3)当有信号触发,且其他条件满足时,进入车道保持状态。当没有信号触发时,无法进入车道保持状态,进入车道保持状态判断见表1。
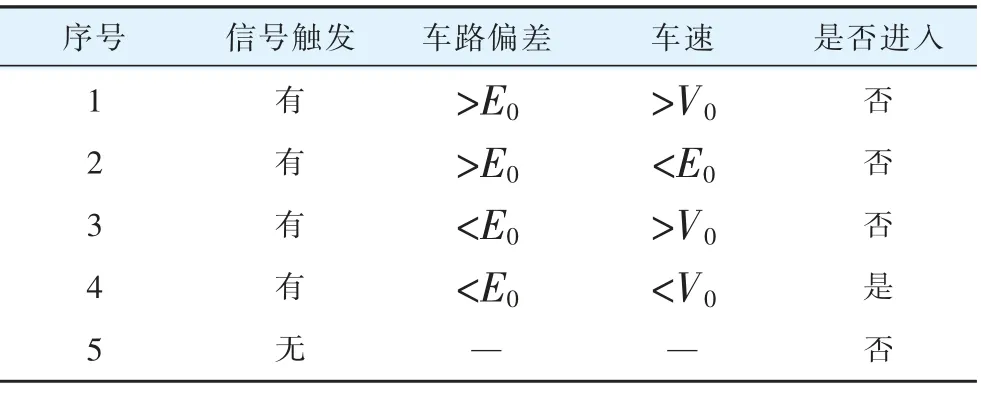
表1 进入车道保持状态判断
从图9可知,只要任意一个条件没有达到要求,就无法进入车道保持模式,要进入保持车道保持模式,需要检测所有条件是否都满足,只有当所有条件都满足才可以进入车道保持状态。
2.3.3.2 退出车道保持状态判断
当车辆处于车道保持时,对驾驶员和车辆状态的监测具有十分重要的意义,判断驾驶员对车辆的操作是主观需求接管车辆还是错误操作,车辆是否变道、是否稳定、EPS是否接受上层信号控制等来决定是否继续车道保持,由于所有这些信号重要度都一样且是并列关系,所以只要有一个符合车道保持退出判定条件,整个系统就会立即退出,并通知人来接管车辆。
通常通过对方向盘施加转矩来操控车辆的横向运动,通过制动或油门控制车辆的纵向运动,本文驾驶员监测主要有驾驶员作用在方向盘上的转矩信号T和转矩持续时间t,人工制动信号Ped_state以及纵向加速度信号a,再决定是否退出车道保持模式。而车辆状态监测主要有是否变道信号LaneChanging、EPS状态信号EPS_state、横摆角速度ω与侧向加速度a以及持续时间t,退出车道保持状态判断逻辑流程图如图10所示。
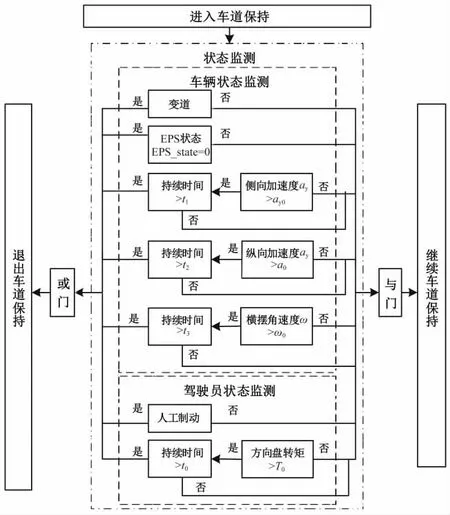
图10 退出车道保持状态判断逻辑流程图
1)当发出转向信号(打开转向灯)时,认为进入变道模式,退出车道保持模式,转向信号对车道保持状态判断见表2。
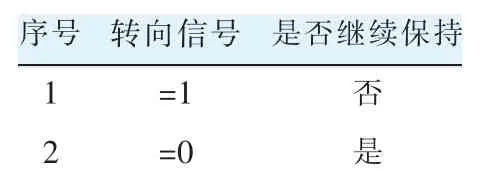
表2 转向信号对车道保持状态判断
2)EPS_state信号表示EPS是否响应上层控制信号,值为0代表响应,值为1代表不响应,此时无法进行车道保持,应立即退出此模式并通知驾驶员接管,EPS状态信号对车道保持状态判断见表3。
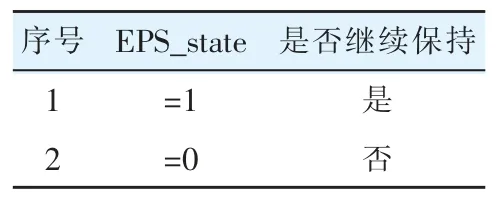
表3 EPS状态信号对车道保持状态判断
3)横摆角速度、横纵向的加速度是表征车辆稳定性的参数,当这些值过大时认为车辆已经超出车道保持的控制范围,应通知驾驶员接管车辆并退出车道保持模式。但为了防止噪声干扰和瞬时的路面冲击而造成误判,故给每一项都增加一个时间阈值,横摆角速度、纵向加速度、横摆加速度对车道保持状态判断见表4~表6。
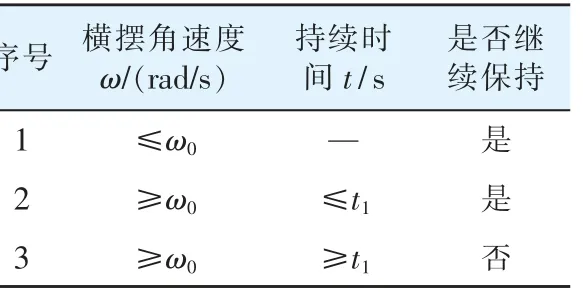
表4 横摆角速度对车道保持状态判断
4)检测到人工制动信号,当制动信号Ped_state=0,此时处于踩下踏板状态,所以退出车道保持模式;当没有人工制动时,Ped_state=1,对车道保持模式无影响,人工制动信号对车道保持状态判断见表7。
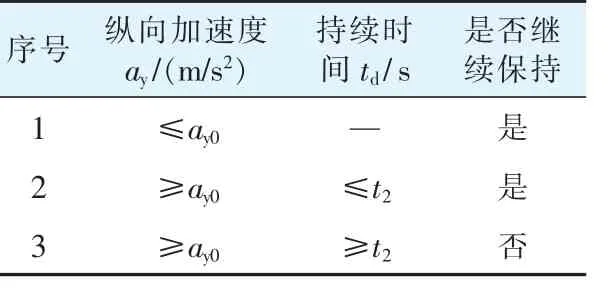
表5 纵向加速度对车道保持状态判断

表7 人工制动信号对车道保持状态判断
5)系统从传感器中采集获得驾驶员操纵方向盘转矩T,当T大于一定阈值T时,且T持续时间t大于阈值时间t时,则认为驾驶员有接管车辆的请求,此时系统退出车道保持模式,当T小于阈值T时,则认为驾驶员没有控制车辆的主观需要。
为消除传感器的噪声干扰与对习惯使用小力矩操作方向盘的驾驶行为进行误判,根据多次试验与驾驶员开车习惯进行合理地调整转矩阈值T,在此处选择T=1.5Nm。同时为防止驾驶员的短时间误操作或者路面对转向系统的短时大冲击而造成误判,或因系统响应过慢,当需要接管时有顿挫感过度不平顺,选择合适的时间阈值t=0.2s。方向盘转矩信号对车道保持状态判断见表8。
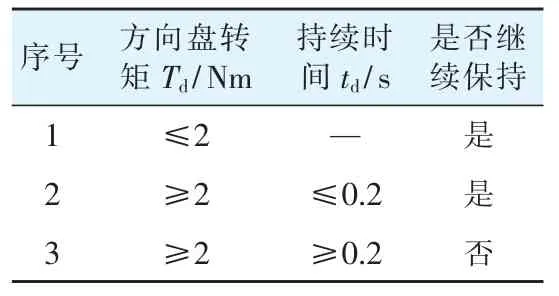
表8 方向盘转矩信号对车道保持状态判断
从退出车道保持状态判断逻辑流程图可知,只要有一个退出车道保持的条件达到要求,就立刻退出车道保持模式,并提醒驾驶员接管,要继续保持车道保持模式,则需要检测所有条件是否满足,只有当所有条件都满足时才可以继续保持车道保持模式。

表6 横向加速度对车道保持状态判断
3 结束语
本文基于纯电动车辆提供一种车道保持系统设计方案,提高了驾驶的舒适性,提升了系统在纯电动平台匹配能力,为后续车辆运动控制、环境融合检测、基于知识决策等智能驾驶关键技术的突破奠定了基础,对最终攻关纯电动汽车智能辅助驾驶L3级目标具有显著的促进作用。
猜你喜欢
汽车实用技术(2022年7期)2022-04-20
汽车实用技术(2022年5期)2022-04-02
小资CHIC!ELEGANCE(2019年20期)2019-07-02
新传奇(2018年47期)2018-08-09
中国建筑金属结构(2018年4期)2018-05-23
华人时刊(2014年6期)2014-07-25
小天使·四年级语数英综合(2011年4期)2011-06-30
辽河(2009年3期)2009-05-04
人民周刊(2009年12期)2009-01-25
