锂离子动力电池传感器多故障诊断策略综述
2022-11-04 07:09王志福罗崴闫愿魏中宝杨忠义
科学技术与工程 2022年27期
王志福, 罗崴, 闫愿, 魏中宝,3, 杨忠义
(1.广西科技大学自动化学院, 柳州 545000; 2.北京理工大学机械与车辆学院, 北京 100081;3.北京理工大学电动车辆国家工程研究中心, 北京 100081)
世界各国都在积极提倡清洁能源,以应对气候变化来实现长远发展。中国积极响应提出了2060年前实现“碳中和”,并在这个目标大背景下,国家发改委、国家能源局发布了《2022年能源工作指导意见》,其在“提升科技创新能力”方面指出:“坚持储能技术多元化,推动锂离子电池等相对成熟新型储能技术成本持续下降和商业化规模应用”。锂离子电池能够大规模应用于军用和民用市场,电池的安全稳定是前提保证。但“摇椅电池”作为能量储存装置,其本身就存在较高的安全隐患,并且锂离子电池单体在应用过程中往往因为储能受限,需要采用数百或数千个单体电池串联、并联或者串并联的方式,以满足车辆对行驶里程和牵引功率的要求,这样才能确保其在实际运行过程中能够安全、稳定、可靠。其中锂离子电池中的传感器是监测电池组在某些情况下会发生机、电、热滥用[1],如果传感器发生故障,电池管理系统(battery management system, BMS)需要精确的数据无法实现,直接会影响电池系统的正常安全运行。由于电池传感器封装难度大,即使传感器发生故障时,也很难及时更换导致电池温度上升到极限温度而不自动触发电池切断装置,触发热失控风险[2]。众所周知,锂离子电池发生故障具有多样性、并发性和互联性的特性,如果早期能够准确、高效地识别出渐变性、突发性等各类故障并进行有效控制,既可以避免故障产生连锁反应起火爆炸,也可以减少不必要的生命财产损失。
综上所述,锂离子动力电池的传感器多故障限制了新能源汽车来获取数据提升电池性能。目前已有大量的研究团队从锂离子电池故障成因出发,从基于模型、基于模型-数据驱动结合、新模式等方法出发对锂离子电池传感器故障和多故障进行诊断。为了最大程度减少电池故障发生热失控风险,现提出是否可以通过电池内置传感器、融合算法等方式解决测取数据精度欠缺和多故障难以协同控制的问题,最后根据以往研究的重难点提出传感器多故障诊断未来的发展趋势旨在为电池的传感器多故障提供参考。
1 锂离子电池故障类型及原因
锂离子电池作为汽车的“心脏”,决定着汽车行驶的里程。锂离子电池系统由电池模组(电池单体串并联)、电池管理系统(BMS)、热管理系统和电气及机械组件四大部分组成。其中BMS的作用主要是对电池电压、电流和温度通过外壳传感器、执行器、主控芯片等进行实时监督。但由于电池组各个单体电池的内部容易出现老化衰减、电池成组过程中线路腐蚀等内因交织着使用过程的操作不当引起过充、过放等异常的外因,这些内外因的综合作用导致了电池的内部和外部故障。其中锂离子电池内部故障分为过充、过放、内短路、热失控等类型。内部故障一方面是BMS以及传感器的本身的故障引起传感器不能正常的工作导致的,另一方面是因为电池内部结构发生电化学反应和内部短路引起的锂枝晶现象。但锂离子电池的外部故障的危险性通常大于内部故障,外部故障会引发内部故障的连锁反应,最后容易引发热失控。其中热失控(thermal runaway, TR)指由于锂离子液态电池在外部高温、内部短路、电池包进水或者电池在大电流充放电各种外部和内部诱因的作用下,电池内部的正、负极自身发热,或者直接短路,触发“热失控”,因为热量无法扩散致使温度快速上升,伴随着电池中负极表面的(solid electrolyte interface, SEI)膜、电解液、正负极等在高温下发生一系列热失控反应(热分解)。最终电池内部压力当经过某一温度点后导致急剧增加的同时转换成热能,形成了单个电池燃烧或者爆炸,最后发生热失控扩散,导致整车起火燃烧[3]。
锂离子电池外部故障可分为三类:传感器故障、电池连接件故障和冷却系统故障。传感器故障往往最容易被忽视,但这可能引发严重的后果。BMS依靠传感器才能实现均衡控制、故障诊断及荷电状态(state of charge, SOC)估计等功能,如果传感器出现偏差、漂移以及停止工作等故障,导致不能实时获取数据,也就无法对电池目前的状态进行精确合理的判断,这样不仅可能降低性能,还可能引起重大的安全事故。但由于传感器隐蔽性高,所以诊断难度大,这也是目前传感器研究的重点和难点[4]。BMS管理由数百个乃至千个单体电池组成的电池组,一方面由于电池单体故障、传感器故障和连接件故障的特征相似,另一方面由于许多故障本质上是微小且隐蔽性强,难以很快识别,所以BMS偶尔会发生误诊断导致误动作。当电池多个故障发生时,如何快速检测和准确诊断故障对汽车安全至关重要。其中电池的故障诊断的流程大致分为故障检测、故障分类、故障定位以及故障隔离四个方面[5],电池的数据处理在电池故障诊断中具有奠基的作用,可以通过加入数学形态学滤波的方法,较好地验证去噪的效果是否显著[6]。
由于多故障诊断策略可以避免不同故障之间的误检,对正常测量误差和电池环境温度、充电状态、健康状态不一致具有较高的稳健性,所以采用有效性优和鲁棒性强的传感器多故障诊断方法,使锂离子电池电压、SOC和温度工作在合适的范围。电池组故障演化过程及BMS故障诊断基本框架如图1所示。

图1 电池组故障演化过程及BMS故障诊断基本框架Fig.1 Battery pack fault evolution process and the basic framework of BMS fault diagnosis
2 锂离子电池传感器故障诊断策略
2.1 基于模型的故障诊断方法
因传感器在外部故障诊断中的重要性,所以需对传感器故障进行实时监测才能防止因锂离子电池发生故障而不自知,产生严重的后果。针对基于模型的电池传感器故障诊断方法,文献[7]提出了一种基于观测器的电池传感器故障诊断方法,该方法在锂离子电池建立电热耦合动态模型的基础上,构建两个扩展的卡尔曼滤波(extended Kalman filter,EKF)观测器,通过对比电池单体状态量估计值与传感器测量值生成残差,通过累计和(cumulative sum, CUSUM)测试方法来进行残差评价;最后通过观察残差组合的不同响应来实现电池的电流、电压和温度传感器故障的诊断和分离,使其具有较好的有效性和鲁棒性。倘若锂离子电池输入电流传感器发生故障,则用滑模观测器进行诊断,该观测器以耦合了电池集总热力学模型的一阶Thevenin 等效电路模型为基础模型,并对锂离子电池非线性部分进行线性化然后通过重组变换成新的系统,并设计基于温度估计误差修正的滑模观测器用于新系统中输出电流的估计,并用范数的残差评价函数进行评价[8]。但由于故障信号的响应远大于建模精确度导致的振荡,且传统电池传感器故障诊断方法无法实现对故障源的准确隔离。为了解决上述问题,在确定随机电流激励为输入信号,一阶等效电路模型的前提下,用奇偶空间法搭配系统矩阵运算对电池输出传感器进行故障检测的同时并利用残差生成器对故障进行检测与隔离[9]。因为电流传感器和电压传感器是用来准确估计荷电状态(SOC)和健康状态(state of health, SOH),其正常工作让电池远离安全工作区域显得非常重要。为了实时监测锂离子电池传感器的工作状态,先假定温度传感器无故障,通过建立一种用残差(库伦计数法计算每个单元的真实SOC和递推最小二乘和无迹卡尔曼滤波联合估计方法得到估计SOC之间的差异或者用于SOC估计的容量与两个非相邻采样时间累计电荷与SOC差值之比估计的容量之间的差异)来确定电流传感器和电压传感器故障是否发生,然后通过比较电池组中每个单元的剩余值和预定义阈值来隔离故障电流或电压传感器[10]。对于传感器的故障检测与隔离还可以采用电池的结构分析理论(在不了解电池参数情况下)和统计方法相结合来生成残差序列,其中在结构分析法后找到电池冗余部分提取和选择子集的方程,以构建诊断模型,然后通过统计推断进行评估[11]。快速和准确的故障诊断对汽车电池组的安全运行至关重要,但由于传感器故障与电池连接件故障具有相似特征,偶尔会发生误诊断,采用非冗余交叉式测量电路和改进相关系数法的多故障在线诊断方法来解决这个问题,该方法是利用每个传感器测量相邻两个单元和一个连接部分的电压之和,并采用相关系数法来获取故障特征;其中通过识别相邻电压的相关系数,可以将电池故障与其他故障区分开来;对于隔离连接故障和电压传感器故障可以通过相邻电压差与电流的相关系数来实现[12]。锂离子电池组传感器或者继电器故障,可以建立有限状态自动机用来同时捕获电池组的连续动态和离散动态;其次,采用分布式诊断结构,避免电池组全局模型的构建,减少计算量;然后,用双扩展卡尔曼滤波算法来估计电池组中各电池的参数、终端电压和荷电状态;最后,利用电流、终端电压残差和SOC残差进行可区分性分析;而诊断方案则是在美国联邦城市驾驶工况(federal urban driving schedule, FUDS)下,对事件的观察和连续动力学的可区分性分析来实现的[13]。高效的传感器故障诊断对电池系统的耐用性和安全性至关重要,因此针对传感器提出了基于模型的电压传感器和电流传感器的故障诊断方案和容错控制策略,该策略利用了递归最小二乘(recursive least square, RLS)和无迹卡尔曼滤波(unscented Kalman filter, UKF)算法;该故障方案首先利用开路电压残差发生器和容量残差发生器产生多个残差,然后鉴于每个残差的SOC适用区间不同,所以可以根据不同的SOC选择不同的残差来判断是否发生传感器故障;最后分别根据开路电压残差和电容残差详细推导出电压和电流传感器的故障值,并将其应用于电池参数容错控制和状态估计[14]。基于模型的传感器故障诊断方法如表1所示。
2.2 基于模型-数据驱动相融合的方法
锂离子电池的传感器故障属于外部故障,外部故障会引起外部短路,为了快速准确地对外部短路进行诊断,首先采用改进的一阶RC(resistor-capacitance)模型建立了锂离子电池外部短路失效过程的电行为模拟实验平台,然后采用动态邻域粒子群算法对模型参数进行重新辨识,最后利用第一层执行初始故障检测和第二层执行基于模型的准确诊断的两层模型的外部短路故障诊断算法[15]。由于SOC和温度对锂离子电池外部短路故障特性有重要影响,所以采用遗传算法对建立的分数阶模型(fractional order model, FOM)和一阶RC模型参数进行辨识;当外部短路故障发生的电解液泄漏行为,通常采用随机森林(random forest, RF)模型搭配三步诊断算法来解决[16]。对于锂离子电池的电压传感器和电流传感器故障,设计了混合系统建模和无气味粒子滤波的锂离子电池组系统诊断方法,该方法是用无迹粒子滤波算法来计算混合系统的状态或模式,并用于估计离散状态和连续状态输出诊断结果,最后采用串并联组成电池组,对电压传感器和电流传感器的不同故障场景进行了实验验证[17]。但监测系统参数异常及过程状态的变化也会导致传感器发生故障,可以采用基于多元统计分析中的统计局部核主元分析(statistical local kernel principal component analysis, SLKPCA)的二维相关系数法的动态更新模型的方法,该方法不仅可以提高模型的泛化能力,还可以提高传感器设备故障诊断的准确性[18]。锂离子电池的传感器故障除上述关于模型-数据驱动融合方法外还可以采用等效模型和粒子滤波的电池组传感器故障诊断方法,该方法首先是在戴维宁等效电路模型和等效热模型基础上建立电池组的热电学模型;其次为了克服系统噪声和非线性问题,采用递归最小二乘法辨识模型参数,并用粒子滤波对电池组的温度和电压进行估计;然后为了消除不确定性引起的残差异常值,提出了基于滑动窗口的残差方法,并采用蒙特卡罗模拟方法计算了不同序列的分布函数、均值和标准差的具体值;最后提出了基于滑动窗的残差对数似然比累积和法来计算残差。此故障诊断方法将多重残差评估很好地运用到检测和隔离电压、电流、温度传感器的故障中[19]。对于电池组传感器故障诊断,文献[20]提出了以单体等效电路模型和热模型为基础,结合电池的电气结构,建立串联圆柱形电池组等效电-热模型,然后通过与EKF和滑模观测器(sliding mode observer, SMO)对比,设计了以电池组电压、温度状态为特征的粒子滤波状态观测器,通过对电池组传感器特性进行匹配;再次,采用学生化残差法进行残差预处理,来检测异常值;最后,用对数似然比累计和的残差评估方法;通过假设电流传感器故障、电压传感器故障、核心温度传感器故障、表面温度传感器故障四类来验证设计方案的有效性和鲁棒性。上述残差处理可以通过设计的数字孪生估计器来实现,该方法是残差与阈值的比大小,而故障处理后的隔离则采用故障敏感度矩阵[21]。对于电池组的传感器故障,还可以用极大似然估计算法来得到每个电池单体的最优故障率,再将故障率代入构建好基于故障树的贝叶斯网络模型进行训练,以此非常直观地显示传感器是否发生故障,进而能迅速定位电池单体故障并更换电池单体[22]。锂离子电池传感器故障诊断流程示意图如图2所示。
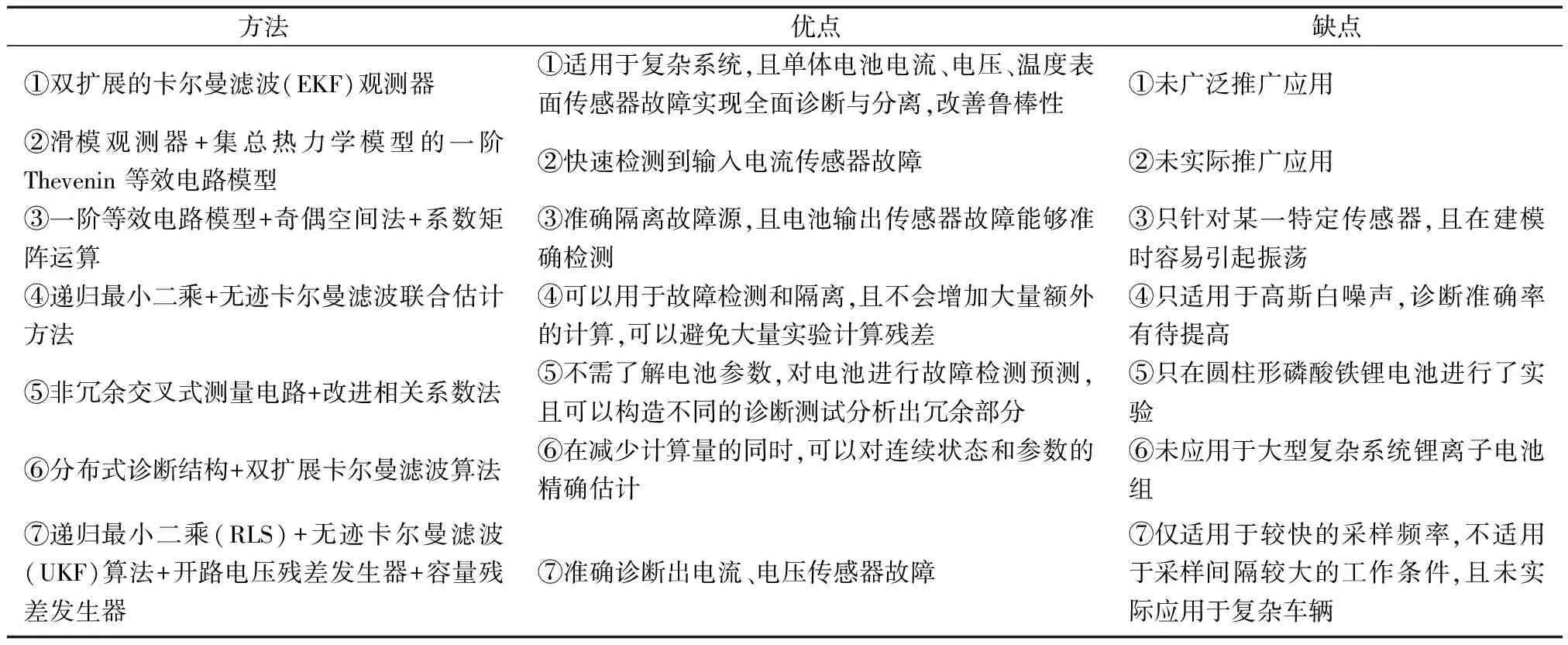
表1 基于模型的传感器故障诊断方法Table 1 Model-based sensor fault diagnosis method

图2 锂离子电池传感器故障诊断流程示意图Fig.2 Schematic diagram of fault diagnosis process of lithium-ion battery sensor
传感器的工作状态正常是故障诊断的基础和保障,当电流传感器噪声过大或出现故障时,电池参数和SOC、SOH和功率状态(state of power, SOP)等产生较大的估计误差;当电压传感器出现故障时,不仅导致状态估计误差增大,还会导致电池出现过充或过放。而目前传感器故障诊断方法大部分都是基于模型的电池单体诊断方法,但单体串并联成电池组时,基于模型的方法已不再适用。这时如果在建立模型的基础上融合大量实验数据进行训练的数据驱动的方法时,既可以满足电池内部电化学反应尤为复杂、参数耦合严重的情况,又可以针对电池不同的模块分块建立特定的建模分析进行更为精确故障定位。故障诊断融合算法既节约了计算时间,又保证了故障诊断结果的准确性。对于电池本身而言,在电池内部植入抗干扰和耐腐蚀能力强的光纤光栅传感器可以相比较于传统的传感器更具有优势,这样可以对电池内部的信号长期监测[23]。传感器内置、融合算法控制等方法这都将可能成为未来研究的重点。
3 锂离子电池多故障诊断策略
3.1 基于模型的故障诊断方法
锂离子电池多故障的发生严重影响动力电池系统的安全性和运行可靠性。电池多故障的诊断可以利用电池残差和观测器搭配进行故障检测,因为每个故障都对应一个残差,并且电池和电池故障(电池短路/开路、传感器偏差、输入电压降和开关短路/开路)可以通过使用残余信号的幅度和斜率或由电池电压产生的范数来检测和隔离[24]。故障诊断除了一体化进行外,还可以分为模块化进行,文献[25]提出用模块化多电平变换器的电化学储能(modular multilevel converter based battery energy storage system, MMC-BESS)系统进行建立数学模型,并且在构造观测器后搭配使用基于端口电压判别的故障定位策略来解决每个子模块的潜在故障点。还可以设计一种新的观测器,用于估计电压和电流测量故障下锂离子电池系统的电荷状态和剩余使用寿命;其次将所考虑的系统转换为Takagi-Sugeno形式,其中状态超矢量包括状态以及电流和电压测量故障;然后运用二次有界方法加上外部扰动以椭球为界的基础下,保证了系统的稳定性,为后续电流电压的故障诊断奠定基础[26]。可重构电池系统是能解决传统方法所解决不了的电池问题,其是在建立的电热模型基础上,进行结构化分析,找出具有最优故障隔离性能的传感器集。因此针对于此提出了一种用于故障诊断的最优化的最小型超定方程集算法,该算法能有效地识别出每个故障方程最少的MSO集合;并且通过与现有的求解子系统方法的比较,证明了该算法在求解多方程、高冗余系统时的优越性[27]。由于之前的交互多模型(interactive multi-model, IMM)故障诊断算法存在因为估计和诊断精度下降、模型转换概率固定导致的诊断延迟的问题,提出了一种基于低惯性噪声降噪(low inertia noise, LN)-IMM的故障诊断算法,该算法结合强跟踪卡尔曼滤波(strong tracking Kalman filter, STKF)实现了锂离子电池的多故障诊断。当处于非模型转换阶段时,可以利用基于模型概率的n阶差分构造转移概率修正函数,来抑制噪声对算法估计精度的影响;当处于模型转换阶段时,需要引入了模型跳跃阈值,用以减少匹配模型切换时的惯性,实现快速模型转换[28]。
多故障是锂离子电池可能出现的情况之一,可以通过重构系统或者设计观测器来分层地对故障进行诊断,但是基于模型下的故障诊断,是在多种假设下,对每个故障设计一个特定模型,这样导致计算量庞大且普适性欠缺。
3.2 基于数据驱动的故障诊断方法
锂离子电池是复杂的非线性的时变系统,其特征也难用常规方法提取到,所以早期故障往往很难检测到。针对上述问题可以用一种基于改进多尺度熵的电池多故障协同诊断方法(modified multi-scale entropy, MMSE),其中的MMSE可以有效提取电池故障早期的多尺度特征,克服了标准多尺度熵中的不足之处;并且可以在触发报警阈值之前,有效地检测和定位多个电池故障/异常,该方法可以为防止多种电池异常/故障引起的电池热失控提供了可行性[29]。对于锂离子电池的多故障诊断也可以采用一种基于修正样本熵的电池早期故障多故障实时诊断方法,该方法通过检测移动窗口中电压序列的修正样本熵,可以诊断和预测不同类型的电池早期故障,包括短路和开路故障,并预测故障发生的时间,该多故障诊断方法不需要精确的电池模型,但是能获得较好的诊断效果,所以未来在电动汽车上将有很好的应用前景[30]。电动汽车电池的单一或多故障诊断来说,一般在预处理阶段采用小波变换对传感器信号的阈值函数进行处理,并在改进传感器结构上使用卡尔曼滤波算法[31]。因安全性对提高故障诊断效率和预测故障的发生起到决定作用,所以传统的熵理论电压故障诊断检测机制难以实现,可以采用将采集来的数据绘制成电压曲线,并观察锂离子电池存在过压故障,建立熵权法计算客观权值以此来定位异常或故障的位置,这种方法因减少了主观性,所以提高了可信度[32]。因为传统的熵理论来检测故障存在局限性,文献[33]中针对这种局限性提出了多级香农熵算法的储能系统故障诊断方法,该方法采用单元级香农熵算法通过比较各模块中不同锂离子电池单元的香农熵来检测故障,该方法具有通用性,能够很好地处理电池早期的故障诊断。但故障诊断中电压信号容易受到噪声信号的干扰,可以用经验模态分解和样本熵的电池故障检测新方法来排除干扰的同时,能够较快识别不同工况下的电池故障情况。该方法是采用对电压数据进行去干扰和用经验模态分解方法提取有效故障特征并计算样本熵值,准确检测和定位电池故障,完善评估策略用来显示故障的级别[34]。基于改进多尺度熵的电池多故障协同诊断的流程图如图3所示。

图3 基于改进多尺度熵的电池多故障协同诊断的流程图[28]Fig.3 Flow chart of battery multi-fault collaborative diagnosis based on improved multi-scale entropy[28]
由于传统的(back propagation, BP)神经网络在针对多故障时具有收敛速度慢、容易陷入局部最优等缺点,采用遗传算法来解决BP神经网络权值和阈值优化的问题,并融合改进的D-S(Dempster-Shafer)证据理论来解决多故障存在交集的情况[35]。纯模糊控制本身具有一定的主观性,缺乏自适应能力,往往在应用中受限[36],所以将模糊逻辑(能对两者模糊关系进行准确描述并且对模糊性信息具有较强的表达能力)和神经网络(具有强大的学习和获取知识的能力,能够避免模糊逻辑依赖于模糊规则的局限性,还能够对信息进行并行推理)相结合的模糊神经网络拥有两者的双重优点,让电池故障诊断系统更加精准,并且能够正确诊断出电池故障原因和电池故障严重程度,提高了电池使用的安全性[37]。电池的安全性,可以采用相关度分析与网格搜索法优化的支持向量机相结合的特征分类方法实现的智能诊断更具有安全性特点,该方法通过数据预处理、相似度归纳和层次分类来达到对多故障诊断同时分类[38]。针对电池故障类型多、诊断复杂的问题,结合径向基函数(radial basis function neural network, RBF)神经网络和单片机的优点,设计了一种基于改进径向基(RBF)神经网络的电池故障诊断方法,该方法通过电池单体模型获取数据然后进行神经网络学习和训练,其中采用减法聚类方法确定RBF神经网络的隐层神经元数量、中心向量和扩展系数,通过这个方法可以延长电池的使用寿命[39]。改进型RBF神经网络的锂离子电池故障诊断方案如图4所示。

图4 改进型RBF神经网络的锂离子电池故障诊断方案Fig.4 The fault diagnosis scheme of lithium-ion battery based on improved RBF neural network
善于捕获输入之间非线性的关系的神经网络,适用于锂离子电池复杂模式和预测问题,使得庞大的数据具有逻辑顺序。因为传统的神经网络适用单一等缺陷,所以多层结构的改进型神经网络算法应用更加广泛。
3.3 基于模型-数据驱动相融合的方法
由于锂离子电池故障诊断中存在测量噪声等不确定因素的问题,为了解决上述问题,文献[39]提出一种基于幅值平方相干谱的电池故障诊断方法。该方法针对单体锂离子电池首先建立二阶RC等效电路模型,用来进行参数辨识;然后采用正弦电流激励电池模型和实际电池系统,分别获得电池模型和实际系统的频率响应,通过引入幅值平方相干函数和动态阈值对判断电池是否存在故障,在确定电池产生故障后,运用多故障模型的方法计算出特定故障的发生概率来确定发生故障的类型[40]。文献[41]中采用只针对锂离子电池不同滥用工况的电化学电池模型参数进行实验识别,用于故障诊断,并使用真实的HPPC循环模拟负载电流剖面来检测这些故障条件,并用算法将识别出的每个模型与注入故障条件进行精确匹配,因此提出的诊断方法可以为故障监测方法提供可选择性,使得锂离子电池电池管理系统故障检测的准确性得到提高。在故障诊断中故障诊断模型和参数十分重要,直接关系到诊断的准确率。既然不能寻找到故障诊断的最优参数,可以首先对原始数据采用主成分分析法进行降维处理,然后利用差分进化算法优化支持向量机确定参数惩罚因子和核函数参数[42]。但分类性能受自身参数影响较大的问题,所以可以采用加入麻雀搜索算法的支持向量机的故障诊断方法,故障诊断准确率提高的同时且收敛速度相对于传统的遗传算法更快[43]。对于故障诊断模型往往不具有重复性,对于多故障模型必须拆分成单一故障再一一建立模型,针对此问题,可以使用无监督极限学习机和K均值构建基于在线序列极限学习机的在线故障诊断方法,该方法可以对数据进行采样的同时进行数据的预处理,将最终界定为正常和故障两种情况[44]。
因为锂离子电池系统的故障大多数与每个单体电池有关,所以通过实际运行数据构建电压和温度的特征参数,并且通过阈值方法对异常电池进行判断,其次利用提取的数据绘制充电电压曲线,用充电电压曲线距离分析和局部离群因子(local outlier factor, LOF)检测方法这两种方法来识别单体的不一致性,达到对异常电池识别的目的[45]。该方法相较于希尔伯特得到包络线,再用离群点检测算法提取故障特征具有一定的优势[46]。也可以利用统计的方法对电池故障进行诊断,首先根据大数据的统计分析方法,并采用基于高斯分布的3σ(σ为激活函数)多级筛选故障诊断方法,确定电池端电压的故障概率;其次针对大量电动汽车的故障数据统计分析,采用神经网络模型进行大样本数据统计规律的建模和拟合;最后应用神经网络算法,将单体故障诊断结果与大样本统计相结合[47]。除了上面统计方法进行锂离子电池的故障诊断外,还可以用统计法里的统计分布。为了提高对噪声的抑制能力,降低电池故障诊断误报的可能。文献[48]提出一种交互式多模型(IMM)算法,并结合卡尔曼滤波(UKF)对锂离子电池进行多故障诊断;其中IMM算法由马尔可夫转移概率矩阵(transition probability matrix, TPM)组成,目的是为了实现各模型输入时信息的实时交互;与此同时,输出端按照TPM将更新后的模型概率信息反馈给滤波器的输入端,减少噪声对算法的影响。误报会引起误动作,所以为了减少故障检测的误报率,采用基于模型法和熵法融合的在线多故障诊断策略,用于检测多种故障类型;首先利用交错电压测量拓扑来区分电压传感器故障与电池短路或连接故障,其次在建立电池综合模型的基础上,进行结构分析,并对不同故障敏感性开展测试;最后采用基于扩展卡尔曼滤波的残差生成和基于统计推断的残差评估对传感器故障进行检测和隔离[49]。数据驱动和模型相结合的方式进行故障诊断,还可以采用基于并行主成分分析(principal component analysis, PCA)和核主成分分析(kernel principal component analysis, KPCA)的锂离子电池组多种故障诊断方法;首先用最小二乘法估计电压参数建立电池PCA模型,其次用基于PCA贡献值实现对在线监测数据的故障检测;然后因为锂离子电池是典型的非线性系统,所以用并行PCA-KPCA重构技术估计故障电池的故障波形,明晰故障原因[50]。
因为锂离子电池内诱发故障的因素复杂,且多种故障特征类似,当设计诊断方法时容易对其他具有相似特征的故障误动作,很容易引发锂离子电池内部滥用故障,所以需要用数据驱动的方法控制建立的特定模型,达到不同的故障不同方法的效果,最终提高多故障诊断的准确性。
3.4 新模式的故障诊断方法
锂离子电池不断进行循环充放电使用,因此开发一种故障诊断系统是必要的。由于环境导致替换难度大,因此提出一种多模型粒子滤波的不间断电源(uninterruptible power supply, UPS)故障诊断系统,该系统根据故障实验后的参数建立故障的诊断模型,用飞思卡尔芯片实现各模块间的通信,使其能够对单一或者复合故障的过充、过放和过热三种形式在短短的5 s内就可以诊断出结果[51]。锂离子电池容易受到温度以及充放电电流的影响,所以对锂离子电池的故障诊断和安全监测是必要的;针对安全问题设计了基于菊花链的分布式BMS结构,该结构主要由硬件电路和软件设计组成,并用改进的安时积分荷电状态估计方法来进行容量、电压和充电特性的测试[52]。文献[53]提出一种智能多电池供电系统实时故障诊断和保护的结构,用来提高系统的安全性和运行智能化程度;该结构设计了电池数据采集模块、电池组SOC估计模块、故障诊断模块、数据通信模块、数据显示和系统配置的用户界面模块、充放电双路切换模块等。不仅可以实现SOC的自我调整,也能实现故障诊断和自我恢复,大大满足了人们对于故障诊断的要求。智能电池故障诊断总体结构如图5所示。
新模式下的硬件平台的搭建需要昂贵的资金,且不具备较强的迁移性。这使得研究者不得不通过建立电池模型和智能算法来达到电池故障诊断的要求。
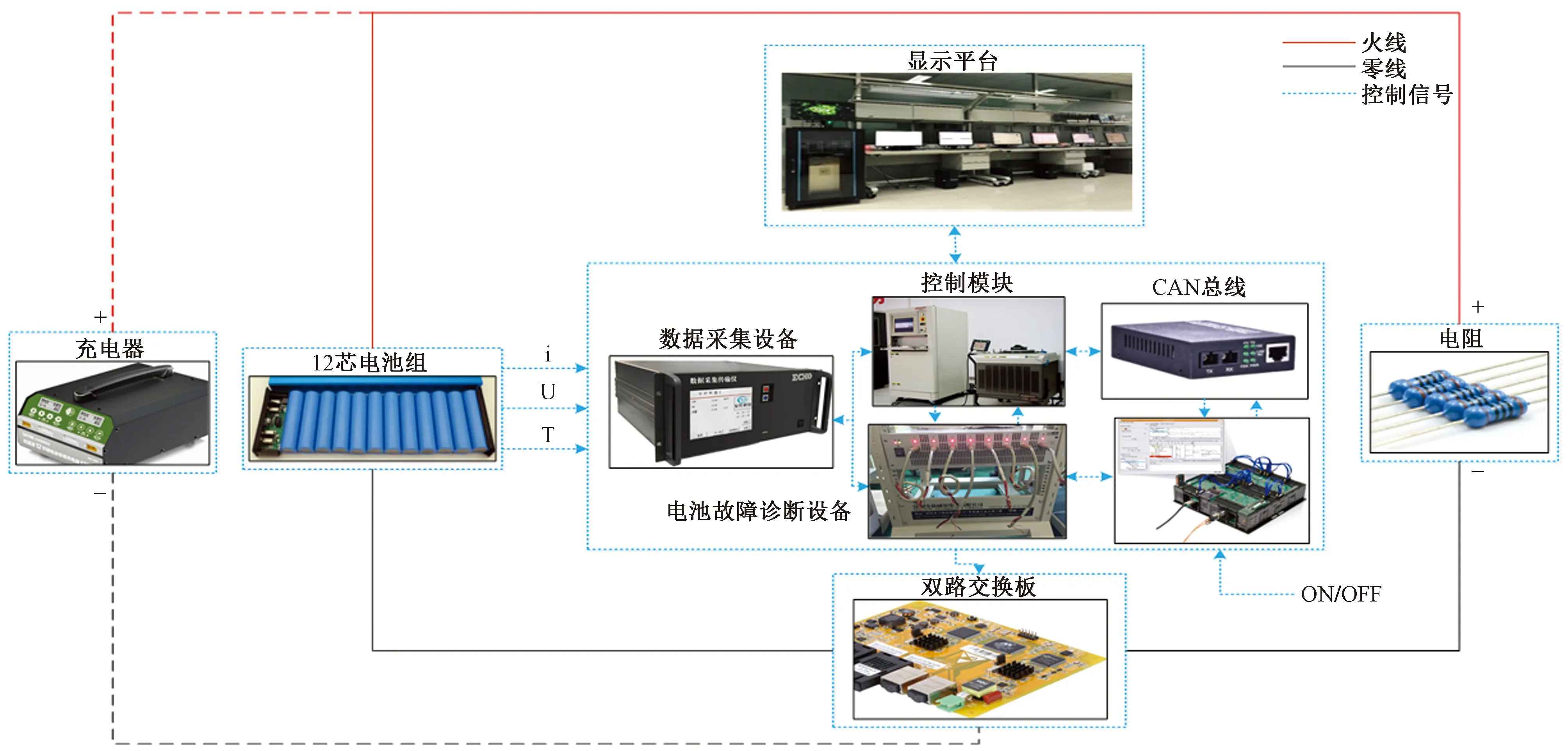
图5 智能电池故障诊断总体结构图Fig.5 Overall structure diagram of intelligent battery fault diagnosis
寻求有效的储能电池早期故障(异常)诊断方法,可以采用欠定盲源分离算法将庞大的问题分解成源信号数目估计和源信号恢复两个子问题,然后再通过经验模态分解、奇异值分解、聚类算法等来处理非线性的故障[54]。电池使用奇异值分解的故障诊断方法,文献[55]提出了基于振动信号变化的储能电池过充故障特征识别技术;因为电池发生故障后,电池壳振动信号会因此发生改变,可以用多分辨率奇异值分解(multi-resolution singular value decomposition, MRSVD)和时频灰度图的方法来进行过充参数的提取;该方法首先采集电池不同工况下壳体的振动信号,对其用MRSVD降噪处理,然后对降噪后的信号进行离散的S变换得到信号的时频图像,并计算出图像灰度共生矩阵的特征参数作为电池过充状态的诊断参数,最后通过能量、熵、对比度三个特征参数来判断是否出现过充故障。针对锂离子电池的漏液、过充、短路和高温故障,也可以用气体来对锂离子电池进行故障诊断的方法;首先,了解锂离子电池故障析出气体的种类,并用不同的传感器对气体进行实时监测;然后,搭建实验平台开展锂离子电池这四种故障的实验,实验过程中也需要对析出气体实行实时监测;最后,根据饰演的结果设计挥发性有机物气体的锂离子电池故障诊断方法[56-57]。除了对气体进行监测的方法,还可以采用串行主成分分析法的气体传感器阵列故障检测方法,该方法不仅对微小和混合故障有效,还可以很好地实现多故障的隔离[58]。因为电池温度异常表现的颜色会不一样,所以可以通过热像仪技术进行电池的故障诊断[59]。为了不建立模型和设计硬件电路,文献[60]提出了一种基于电动汽车服务管理中心系统的电压故障检测方法;该方法利用类间相关系数对电池短路故障进行分析,并通过捕获逆变压降;其次该系数值不仅通过放大电压差提高故障分辨率,而且通过设置移动窗口延长故障记忆;最后,通过设计回路连接点的初、末电压,实现了智能故障定位方法。从上述叙述可以看出,锂离子电池故障诊断的方法有许多,但由于各种诊断方法的参数维数和诊断策略存在差异,难以选择合适的方法进行应用;所以采用标准化故障特征对比方法,用定量的方式研究锂离子电池在不同故障程度、环境温度、荷电状态和老化程度下不同故障诊断方法的灵敏度,并比较建立电池模型,样本熵和相关系数这三种诊断方法,最后利用标准化故障特征比较法对故障信号进行去量化和标准化,直观得出三种诊断方法的诊断性能[61]。对于离散系统的主动诊断,可以首先设计一种新的离散系统模型,用于研究离散系统的主动诊断,该模型通过对系统的主动控制来实现诊断,其次引入了利用控制对系统进行诊断的能力的主动诊断性新定义,然后得到了系统主动诊断的充要条件后设计一种检查主动可诊断性的算法,并在系统具有主动可诊断性的情况下将所得结果用于复杂电池系统的故障诊断[62]。
为了避免建立针对电池故障的特定电池等效模型和大量的实验数据,提出用气体等化学物质来进行电池的故障诊断,根据气体种类的不同,实时对电池故障产生的气体含量和种类进行监测来判断电池是否发生故障诊断,并且可以用测试气体的化学试纸大致判断故障的位置。除了依靠气体诊断外,还可以通过智能仪器手段,对电池温度进行监测,通过温度异常表现所得到的颜色不同,进而判断出电池是否发生故障。新模式下的故障诊断方法既减少了数学建模带来的计算量大,又可以避免大量实验的烦琐。
4 总结与展望
首先根据锂离子电池故障的特征分析了传感器故障造成的危害。当电压传感器故障时,锂离子电池达到安全充放电截止电压会持续充放电,进而因电池过充或过放导致锂离子电池鼓包,发生内短路;温度传感器发生故障,BMS因无法实时监控精确的温度状态,会发布错误指令造成电池管理系统的误动作。由于电池内部温度很难通过实验测得,所以目前电池的传感器都是测得电池表面的温度或者电池极耳的温度,再进行内部温度的推演,目前已经有部分学者通过内置新型传感器来替代传统的测电压、电流等数据间接分析电池故障形式的方法,直接观测电池是否发生鼓包、内短路等故障。虽然目前针对电池传感器故障和多故障并发的研究方法有许多,但电池传感器故障大部分研究方法都必须有许多假定条件,设计的某种方法只针对某种特定的故障,缺乏通用性的同时且未能在实际工程中较好的应用。
针对动力电池系统高精度高可靠性的故障诊断方法进行深入分析。目前故障诊断方法基本分为四类:基于模型的故障诊断方法、基于数据驱动的故障诊断方法、基于模型和数据驱动想融合的故障诊断方法、新模式下的故障诊断方法。其中基于模型的方法虽然能够快速、实时地检测和分离故障,但对建模精度要求较高,且通过残差信号与阈值进行比较判断是否出现故障,准确率较低。因此,为了寻找精度高且计算简便的模型能更好地了解电池内部的运行,目前建模方法已经从传统的单一模型到结合各自优点的热电耦合等多模型。虽然基于数据驱动的方法可以避免电池建模的困难要求,但基于数据驱动的训练过程需要大量精准的实际电池故障数据,且耗费时间长,且数据测量难度大、噪声多。
目前研究最多的是模型和多种智能算法相融合的方法,该方法既可以拥有模型带来的精确性,也有算法带给的故障诊断的精准定位,还能提升动力电池多状态的鲁棒性。电池多故障的诊断方法不能很好地对多故障进行容错控制,且当电流、电压、温度等各类传感器同时发生故障时的诊断方法是需要在未来进行研究的,且需要在提高多故障诊断的准确率的同时并对单一故障进行诊断隔离。正如数字孪生技术可以在解决电池实体和虚拟模型衔接不一致的困难,根据数据的实时更新满足用户的要求,但数字孪生技术紧紧依靠模型和数据驱动,通过残差和阈值的大小来进行判断,可能某一类的故障会表现相同的残差,该技术需要通过故障树建立起更加完备的故障库,才能诊断复杂的故障类型。集成算法中决策树的参数配置是多尺度分析的故障特征提取方法的核心,其将直接决定故障分类方法的效率和精度,决策树参数优化方法目前欠缺的同时也正在成为未来故障诊断分类方法研究的重点。虽然区块链技术可以在梯次利用过程中对电池的历史数据进行分组和筛选,为后续的研究提供依据,但因为是一个链,所以对原始数据修改或删除较困难,且效率低下,未来需要大量研究建立庞大的数据库。由于电池的多故障存在强耦合关系,并且某些单一的故障诊断算法因需要层层迭代计算导致工作效率低下、电池故障模式的多样化、电池故障提前预警等因素影响已经初显壁垒,所以需要获取大量关于行车环境、运行工况、驾驶行为等因素影响下实车大数据,借助快速发展的新型的传感器技术、智能故障诊断技术和云端一体化技术等新兴平台与技术,动力电池的故障诊断将会更加精准且快速。
猜你喜欢
心理学报(2022年9期)2022-09-06
汽车实用技术(2022年16期)2022-08-31
舰船科学技术(2022年11期)2022-07-15
成都信息工程大学学报(2022年2期)2022-06-14
汽车实用技术(2022年9期)2022-05-20
心理学报(2022年4期)2022-04-12
北京大学学报(自然科学版)(2022年1期)2022-02-21
汽车工程师(2021年12期)2022-01-18
汽车工程师(2021年12期)2022-01-18
汽车工程师(2021年12期)2022-01-18