
智能视觉安防巡检机器人设计
2022-11-03 03:18杨青青韩雪雯吴千千
无线互联科技 2022年15期
杨青青,韩雪雯,吴千千
(保定学院,河北 保定 071000)
0 引言
如今,我国大部分化工厂及危险品仓库存储主要采用定点检测和人工巡检这一传统方式,这种方式存在人员安全难以保证和检测不全面、不精确等弊端。本设计基于此背景研制了能够在化工厂进行日常自主安全巡检和及时报警提醒的智能视觉安防巡检机器人,代替传统人工方式,达到了及时、精确的目的,保障了巡检人员的安全,实现工厂智能化、自动化。
1 系统原理及方法
本产品采用STM32F1 开发板和Arduino MEGA2560作为主控芯片,外置了MQ 系列(MQ_2,MQ_135,MQ_3,MQ_7,MQ_9)传感器、温湿度传感器、雨滴传感器、光敏传感器、GPS 定位等硬件采集设备,主控芯片采集周围环境信息,并将采集的信息通过ESP8266 无线传输模块上传到监控台,进而通过上位机实时显示并监测工厂的环境参数,实现了越限报警。 智能视觉安防巡检机器人设计,包括硬件模块的选型与设计、后台监测软件开发与设计[1]。 检测系统的核心硬件模块,包括采集模块、传输模块、监控模块、控制模块、GPS 定位、红外避障、自主循迹模块、4G 短信报警8 个部分。总体设计,如图1 所示。
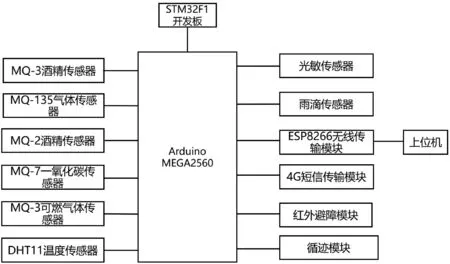
图1 总体设计
2 系统硬件设计
2.1 系统整体设计
本产品数据采集端采集环境信息、获取定位以及监控上传至Arduino MEGA 2560,通过ESP8266 无线传输模块传输至上位机,在上位机上进行显示。 上位机实现了环境信息实时监测、机器运动的远程控制、监控等功能[2-5]。
2.2 系统详细硬件设计
本项目硬件核心模块包括:采集模块、传输模块、监控模块、控制模块、GPS 定位、红外避障、自主循迹模块、4G 短信报警模块8 个部分。
(1) 采集终端:由STM32F1 开发板和Arduino MEGA2560 外接各种传感器MQ 系列(MQ_2,MQ_135,MQ_3,MQ_7,MQ_9)传感器、温湿度传感器、雨滴传感器、光敏传感器、GPS 定位、红外避障等信息采集设备,实现了对工厂环境参数的实时采集。
(2)传输模块:采用ESP8266 无线传输模块和HC-06 蓝牙模块来进行数据的传输。 无线传输模块和蓝牙模块具有低功耗、强力抗干扰、RSSI 信号强度检测、数据加密等优点。 不仅可以将底层采集的信息传输到监控中心,还可以将监控中心的命令下达至底层[6]。
(3)监控模块:使用舵机控制的视频传输模块,实时获取视频信息并通过无线模块传输至移动终端。 主要作用是进行图像的采集,可以进行图像的保存和传输。
(4)控制模块:上位机发送字符给HC-06 蓝牙模块,蓝牙模块接收后发送信号给STM32F1 开发板,开发板最终驱动机器人,让其运动起来。 包括对机器人的启动、前进、后退、转弯、停止、中高速控制、避障等功能[5-6]。
(5)GPS 定位:采用GT-U7 模块,具有高灵敏度、低功耗、小型化的优点。 其极高的追踪灵敏度大大扩大了定位的覆盖面,在普通GPS 接收模块不能定位的地方,如狭窄都市天空下、密集的丛林环境等,GT-U7 都能高精度定位。
(6)红外避障:红外避障传感器具有一对红外线发射与接收管,发射管发射出一定频率的红外线,当检测方向遇到障碍物时,红外线反射回来被接收管接收[7]。
(7)自主循迹模块:采用光电循迹模块对地上的黑线较周围浅色背景反射率低,通过对机器人前方地面发射光(通常为红外线),比较接收到的光信号强弱即可知道前进方向与线的差距,从而调整路线。 这样,在有黑色轨迹的工厂走廊上,装有光电循迹模块的机器人就能自己按照轨迹来向前走,从而达到自动导航循迹[8]。
(8)4G 短信报警模块:短信模块传输距离远,耐用抗干扰,通信连接主板,启用后能够在其他模块监测信息的同时对数值进行越限报警,以短信的方式发送至管理员手机,实时监测工厂内安全情况。
3 系统软件设计
3.1 底层驱动功能软件开发
主程序通过发送指令调用自定义的模块Front()函数,xunji()函数,fengmingqi()函数,hhnmbdzgq()函数进行实现,以下是具体主程序实现:


在为管理员传递信息时用到了重要的报警短信发送程序,调用void sendMeg(int bjms)短信报警程序实现信息的发送传递,具体sendMeg(int bjms)程序的实现流程,如图2 所示。

图2 短信报警流程
3.2 信息采集功能软件开发
本项目为了实现对周围环境做出及时的反馈,主要采用了Arduino MEGA2560 连接各种传感器,给定正常的数据范围。 在传感器检测到数据后能够在上位机显示并做出判断。 实现小机器人的自动避障功能,主要采用上位机发送字符指令,来控制机器人的运动,机器人还能够自主循迹来运动。 采集模块代码编写流程,如图3 所示。

图3 采集模块流程
信息采集软件利用Android 开发了一个App 监控程序,通过对工厂的实时监测,利用硬件设备采集得到了工厂温度、湿度、二氧化碳,可燃气体,烟雾光照以及是否漏水等参数,确保工厂处于安全状态,若发现安全隐患及时监测并报警。 为了实现小车的自动避障功能,主要采用上位机发送字符指令,来控制小车的运动。 该App 连接到硬件主板后获取数据进行显示,监听服务器发来的消息,具体连接服务器代码如下:


4 结语
本项目是基于 STM32F1 开发板和 Arduino MEGA2560 所做的智能视觉安防巡检机器人,利用Arduino MEGA2560 连接各种传感器,使小车具有采集接收数据、判断数据是否处于正常范围等功能,可以提前对危险做出反应,能够大大降低生产安全事故带来的人员伤亡和财产损失。 自动避障和定位功能,能够自动巡检并在检测到危险信号时发出警报,并且传送到上位机,使管理人员及时防范。 智能巡检机器人成本低,便于操作,采集数据精确,可减少人工操作,具备自动避障、短信报警、GPS 定位、自主循迹等功能,从而 实现了生产过程的智能化、信息化管理。
猜你喜欢
湘潭大学自然科学学报(2022年2期)2022-07-28
当代工人(2019年4期)2019-04-22
电子测试(2018年15期)2018-09-26
车迷(2018年12期)2018-07-26
当代工人(2018年21期)2018-03-06
电子制作(2017年1期)2017-05-17
中国老区建设(2016年3期)2017-01-15
山东工业技术(2016年15期)2016-12-01
电子制作(2016年11期)2016-11-07
学习月刊(2015年3期)2015-07-09
