自动化集装箱码头港区道路铺面结构设计
2022-11-01 05:35:40岑学徐
水运工程 2022年10期
陈 钦,岑学徐
(中交第四航务工程勘察设计院有限公司,广东 广州 510290)
随着智能驾驶技术的发展,越来越多的新建或改建的集装箱码头也开始尝试从传统的人工作业转入自动化作业,从而促使港区内作业车辆从集装箱拖挂车升级为智能引导车(intelligent guided vehicle,IGV)。根据IGV的特点,对港区道路铺面的结构设计也提出新的要求。本文结合钦州港自动化集装箱码头工程,针对IGV的特点和使用要求,对IGV行驶的港区道路进行铺面结构设计探讨。
1 自动化码头港区道路的特点
1.1 采用IGV进行水平运输
自动化集装箱码头港区道路与传统集装箱码头相比主要的特点有:1)采用IGV替代集装箱拖挂车进行集装箱从码头作业区到堆场区之间的水平运输;2)IGV行驶通道交通渠化严重,车辆对路面的作用次数频繁,对铺面结构的适用性及耐久性提出更高的要求;3)IGV不同的定位方式对路面结构的选型和构造措施提出不同的要求。
钦州港自动化集装箱码头工程采用IGV替代集装箱拖挂车进行集装箱从码头作业区到堆场区之间的水平运输[1]。每辆IGV有4个轴,轴距从前至后分别为1.65、6.00、1.65 m,每个轴有2个轮,轮距为2.56 m,见图1。无交互作业时IGV最大轮压为125 kN,与岸桥主小车交互作业时IGV最大轮压为145 kN,与海侧交互区轨道吊小车交互作业时IGV最大轮压为135 kN。传统的集装箱拖挂车最大轮压为70 kN,最大轴压为280 kN。因此,IGV与传统的集装箱拖挂车荷载相比,最大轴压差别不大。
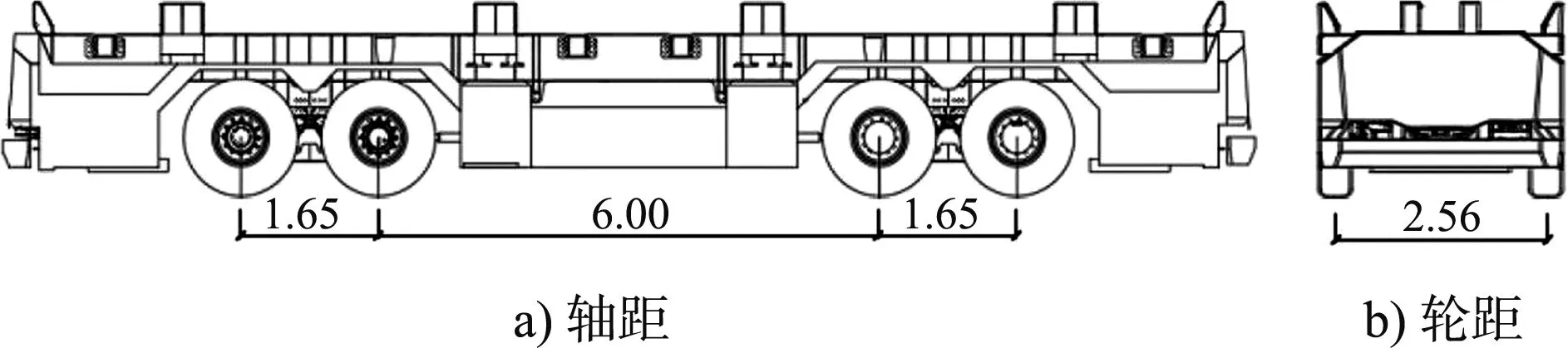
图1 IGV车辆(单位:m)
1.2 IGV行驶的道路交通渠化严重
自动化集装箱码头作业效率远高于常规集装箱码头,且IGV行驶路线相对固定,交通渠化严重,故在道路铺面设计年限内IGV的累计作用次数远高于常规集装箱拖挂车,IGV作业区铺面结构设计时面层厚度往往比普通集装箱拖挂车的更厚。
1.3 IGV定位方式的特点及要求
自动化集装箱码头IGV定位方式可分为磁钉定位和北斗卫星定位。
IGV采用磁钉定位时,需要在铺面结构内预埋磁钉,磁钉在横、纵方向均为每2 m布置1个,局部位置条件受限时可以微调。为了避免金属干扰磁钉的信号,在磁钉的周围水平直径100 mm、深度100 mm范围内不能有金属,见图2。

图2 磁钉埋设要求(单位:mm)
IGV采用北斗卫星定位时,需要在铺面结构表面设置交通标线进行视觉识别辅助定位,须保证自动化水平运输设备的行驶平顺性和交通标线的整齐连续。
2 自动化集装箱码头的港区道路铺面结构设计要点
2.1 港区道路铺面结构选择
自动化集装箱码头采用IGV进行集装箱的自动化水平运输,对港区道路铺面结构的选型也有新的要求。IGV轮压较大、行驶路线较固定、交通渠化严重,对铺面的平整度、耐久性、强度要求较高,IGV作用下的港区道路铺面结构类型可选用现浇混凝土铺面或者沥青混凝土铺面。这两种铺面各有优缺点,其中混凝土铺面具有平整度好、强度高、耐久性好等特点,但对地基要求高,地基不均匀沉降时容易导致开裂;沥青混凝土铺面具有行车舒适、平整度好、适用变形能力强等特点,但使用年限相对短,IGV荷载大且路线较固定,长期作用下沥青铺面易产生车辙。自动化集装箱码头运行效率高且全天运行,选择铺面结构时应考虑使用年限高、耐久性强的铺面。若铺面使用年限短,需要长期维护的铺面会影响IGV运行,进而降低自动化集装箱码头的效率,造成不利影响。因此,建议选择强度高、耐久性好、平整度高的混凝土铺面结构。必要时,可在混凝土面层中掺加聚丙烯纤维,提高局部抗压承载能力和减少混凝土面层裂缝。
2.2 路面结构设计
当IGV采用磁钉定位时,布置有定位磁钉区域的铺面及构筑物结构设计应充分考虑钢筋、护边角钢等金属物对设备定位准确性的影响[2]。当采用现浇混凝土面层时,由于现浇混凝土在分缝处设有传力杆和拉杆、在道路边缘处设有边缘钢筋和港区道路沟井的四周混凝土面层板设有加强钢筋,为了避免对磁钉的定位影响,在磁钉周围水平直径100 mm、深度100 mm范围内不能有金属,此处的设计是个难点。
针对这种情况,目前考虑2种方法:1)把传统钢筋换成FRP筋(玻璃纤维增强复合筋)[3]。FRP筋可与混凝土一起承受荷载,与普通钢筋相比,其抗拉强度标准值更高,但考虑环境影响系数和材料分项系数后,FRP筋的抗拉强度设计值会下降较大。其优点为属于非金属材料,不影响磁钉,具有较好的抗腐蚀性。其缺点是价格贵,大概是普通钢筋的2.5倍,而且不能焊接和现场加工处理,性能受温度影响大,耐久性有待研究。2)结合磁钉在道路的布置特点,在混凝土的分缝和沟井的设置上进行避让设计。此设计的优点是无需采用昂贵的钢筋替代品,节省工程费用,钢筋的性能也比FRP筋稳定,耐用性更好。但此方法对混凝土的分缝和沟井的设置提出比较高的要求,需要在设计上进行多专业的沟通协调和在满足规范要求上进行合理避让设计。钦州自动化码头工程采用第2种方式进行设计,经过混凝土面层的合理分缝和沟井的避让设计,成功地完成磁钉在混凝土路面内的设置。
当采用北斗卫星定位时,需要在铺面结构表面设置交通标线进行视觉识别辅助定位,为保证IGV的行驶平顺性以及交通标线的整齐连续,铺面结构可选用现浇混凝土铺面或沥青混凝土铺面。当采用现浇混凝土铺面时,现浇混凝土铺面分缝设计应提前考虑道路上标线的布置,混凝土路面板分缝应避开标线,以免分缝从标线内穿过,影响视觉识别辅助定位的准确性。为减少铺面颜色和标线颜色产生干涉,影响自动化水平运输设备的视觉识别系统的准确性,当采用现浇混凝土铺面时建议采用黄色标线,当采用沥青混凝土铺面时建议采用白色标线。
2.3 道路平整度
IGV对道路的平整度要求高,道路若不平整,IGV上下振动容易造成设备损害、定位不准确、行驶路线偏移等不利影响,因此应尽量避免。轨道槽容易引起IGV跳车、振动,影响IGV的使用寿命及定位系统,首先从平面布局上避免轨道梁等结构横穿道路;其次提高港区道路差异沉降控制标准[4],避免差异沉降引起的道路不平整;最后在铺面结构的设计上可选用平整度高的现浇混凝土或者沥青混凝土铺面结构。
3 IGV荷载作用下的港区道路铺面结构的计算分析
3.1 荷载定义
以钦州港自动化集装箱码头工程为例进行计算分析,其港区道路主要行驶IGV,IGV在不同作业工况下轮压有所变化,本文的荷载模型以145 kN的轮压为例,采用软件计算荷载当量单轮荷载,IGV轮压荷载布置见图3。

图3 IGV轮压荷载

3.2 荷载作用次数
流动机械年运行次数应通过调查分析确定。当无资料时,根据港口装卸工艺流程,流动机械类型和行走路线等情况,按《港口道路与堆场设计规范》的公式确定第i种流动机械荷载年运行次数Ni,公式为:
Ni=ZiWiψΔ/(ωint)
(1)
式中:Zi为第i种流动机械的装运量扩大系数;Wi为第i种流动机械的每年所分担的货运数量;ψ为不平衡系数;Δ为轮迹重叠系数;ωi为第i种运输车辆的装卸量;nt为可以分流的道路(通道)条数。
IGV在自动化码头中运行路线较为固定,车辆类型较单一,也可通过车辆运行路线仿真确定流动机械荷载年运行次数。
3.3 结构组合及材料参数
钦州港自动化集装箱码头港区道路铺面结构采用混凝土铺面,结构自上而下分别为水泥混凝土面层、水泥稳定碎石基层、级配碎石底基层。水泥混凝土面层标准板边长为4 m。水泥混凝土28 d龄期的弯拉强度设计标准值fr,c为5.0 MPa。铺面结构材料参数见表1。

表1 铺面结构材料参数
3.4 验算指标
水泥混凝土铺面须验算其结构抗断裂性能是否满足需要。控制面层板疲劳断裂的极限状态方程为:
γpσc≤knkTkyfr,c
(2)
式中:γp为铺面结构设计的结构等级系数;σc为设计标准单轮荷载产生的面层板最大弯拉应力;kn为流动机械重复作用的水泥混凝土弯拉强度的疲劳折减系数;kT为考虑温度应力的折减系数;ky为水泥混凝土弯拉强度的龄期增长系数;fr.c为28 d龄期的水泥混凝土弯拉强度设计值。
3.5 计算结果
确定港区道路铺面结构参数条件后,采用港口铺面结构计算软件分析,确定铺面结构厚度。
经计算分析,钦州自动化集装箱码头工程港区主干道采用360 mm厚现浇水泥混凝土面层、200 mm厚水泥稳定碎石基层、200 mm厚级配碎石底基层;轨后IGV装卸作业通道采用400 mm厚现浇混凝土面层、250 mm厚水泥稳定碎石基层、200 mm厚级配碎石底基层。
4 结论
1)自动化集装箱码头的港区道路与普通的集装箱码头的港区道路相比,对港区道路铺面的平整度、强度、耐久性要求更高,且有IGV定位要求。铺面类型建议选用强度大、耐久性好、平整度高的混凝土铺面结构。
2)对于IGV采用磁钉定位时磁钉周边不可以有金属的特殊要求,可根据磁钉在道路上的布置特点,在混凝土的分缝和沟井的设置上进行避让设计。对于IGV采用北斗卫星定位时,在铺面结构表面设置交通标线进行视觉识别辅助定位,混凝土路面板分缝时应避开标线,避免分缝从标线内穿过,并且在现浇混凝土铺面上建议采用黄色标线,在沥青混凝土铺面上建议采用白色标线。
3)对于IGV行驶的道路,尽量避免导致路面不平整的因素,如从布局上减少各种沟槽横穿道路;地基处理到位,避免不均匀沉降;选用平整度高的铺面结构。
4)对于IGV荷载作业下的港区道路的铺面结构厚度设计,可采用《港口道路与堆场设计规范》相关公式进行计算确定。
猜你喜欢
中学生数理化·中考版(2021年9期)2021-11-20 06:17:36
上海公路(2019年1期)2019-06-18 11:05:08
西南交通大学学报(2018年6期)2018-12-18 02:23:20
商周刊(2018年15期)2018-07-27 01:41:18
商周刊(2018年15期)2018-07-27 01:41:18
商周刊(2018年15期)2018-07-27 01:41:18
石油沥青(2018年1期)2018-04-12 07:32:01
上海公路(2018年4期)2018-03-21 05:57:46
中国公路(2017年14期)2017-09-26 11:51:45
商周刊(2017年9期)2017-08-22 02:58:04