
基于行人横穿事故的AEB 系统关键参数研究
2022-11-01 02:46姚禹城祝琳
农业装备与车辆工程 2022年9期
姚禹城,祝琳
(201620 上海市 上海工程技术大学 机械与汽车工程学院)
0 引言
随着我国经济的快速发展,汽车保有量也随之增加,汽车在提供便利的同时,也带来了严重的安全问题。据统计,在我国道路交通事故中,行人作为交通参与弱势方的死亡占比率最高[1]。研究适合我国道路交通环境的汽车主动安全系统已成为各大高校和车企重点关注的问题,其中自动紧急制动(Automatic Emergency Braking,AEB)系统能有效避免或减轻事故的发生[2]。
国内学者胡文浩[3]等对全球事故协调计划(Initiative for the Global harmonization of Accident Data,IGIAD)数据库进行挖掘,对交通参与方、事故形态等进行了分析,并聚类构建了典型预碰场景;曹毅[4]等基于国家车辆事故深度调查体系(National Vehicle Accident In-depth Investigation System,NAIS)数据库中人车碰撞视频,对人车事故进行特征分析,得出在行人AEB 中传感器探测角度比探测距离对行人的保护更重要;郭风虎[5]等利用轿车-电动两轮车事故,对AEB 系统传感器探测角度和探测距离进行了优化;何霞[6]等采用PreScan 和Simulink 联合仿真平台,讨论了行人AEB 触发宽度与车辆速度之间的关系。国外学者ANDERSON[7]等人基于真实交通事故数据,分析AEB 系统在追尾、右转和行人碰撞中的表现;欧洲新车评价规程(Euro-NCAP)在2014 年正式将AEB 系统纳入测试规范,并在2025 远景技术路线图中重点提出了对道路弱势群体的保护性[8]。
笔者对筛选的108 起人-车横穿碰撞事故进行重建,得出事故发生的整个过程,然后对事故发生时间、行人碰撞位置、人车速度进行特征分析,并结合中国新车评价测试规程(C-NCAP)[9]聚类得出3 类行人横穿事故场景。基于主流传感器参数和事故数据,通过联合仿真平台,得出在行人横穿场景下AEB 系统传感器探测范围和分级制动策略的最优值,为设计符合我国道路交通环境的AEB系统提供参考。
1 事故筛选与重建
1.1 案例筛选
本文基于NAIS 松江站点数据库进行乘用车对横穿行人事故案例(简称行人横穿事故)的筛选,筛选标准为:事故参与行人只有1 人且运动方式为横穿马路;事故参与车辆只有1 辆,且为轿车、面包车、SUV;案例需采集到汽车事故资料记录器(Event Data Recorder,EDR)数据或行车记录仪数据或道路监控视频。基于以上标准,从NAIS 松江站点筛选出108 起行人横穿事故。
1.2 事故重建
事故重建是对事故发生过程进行再现的一种技术,目前PC-Crash 是事故重建中应用较多的软件。行人横穿事故重建主要依据事故现场航拍图、与参与方相关的各种痕迹、车辆损坏位置、人员伤情、汽车EDR 数据、事故视频、参与方及目击证人的自述信息,然后在PC-Crash 软件中再现事故发生全过程,为后文AEB 系统优化研究提供参考。
重建底图选用分层CAD 事故过程图和事故地点道路航拍图融合的方法,做到1∶1 还原真实事故场景,提高重建过程准确率。图1 为事故现场航拍图,图2 为事故过程图。

图1 事故地点道路航拍图Fig.1 Aerial photo of road at accident site

图2 分层CAD 事故过程图Fig.2 Layered CAD accident process diagram
在PC-Crash 对108 例行人横穿事故进行重建,并通过视频和汽车EDR 数据进行校准,还原碰撞过程,可以得到车辆与行人的运动轨迹、运动速度、车辆制动减速、碰撞点位置等相关信息。三维可视化碰撞过程如图3 所示。

图3 仿真碰撞过程图Fig.3 Simulation collision process diagram
2 行人横穿事故分析
2.1 行人横穿事故总体信息
事故发生时间分布如图4 所示。事故主要发生时间在5:00—8:00 和19:00—23:00,此时为上下班时间,交通参与者较多,冲突相应增多,人车碰撞事故概率相应增大。在午间13:00-15:00,人车事故数也较多,这应该与午休期间人们比较疲劳有一定的关系;在18:00-20:00 也会有人车事故发生,这应该与黄昏时光线转换有关;在23:00—次日2:00,此时交通参与者少,道路空旷,汽车容易超速行驶。在筛选的行人横穿事故中,行人从左侧横穿马路与从右侧横穿马路的事故数占比为44%和56%。统计发现,左侧横穿事故多发生在白天,事发时光线较好;右侧横穿事故大部分发生在夜间和晨昏,事发时光线较差。
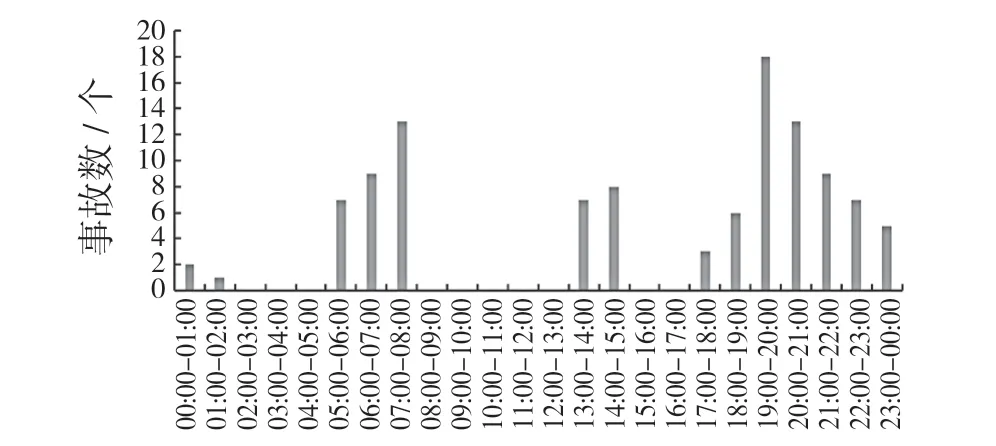
图4 事故时间分布Fig.4 Accident time distribution
2.2 碰撞位置与速度特征分析
在对行人横穿事故进行分析时,将事故车辆前部分为4 个部分,从右向左依此是F1、F2、F3、F4。行人横穿事故第一碰撞点分布如图5 所示。发生在车辆两侧的事故较多,占比为74.4%,由于发生在两侧的近端碰撞给予传感器的反应时间较少,因此最为危险。
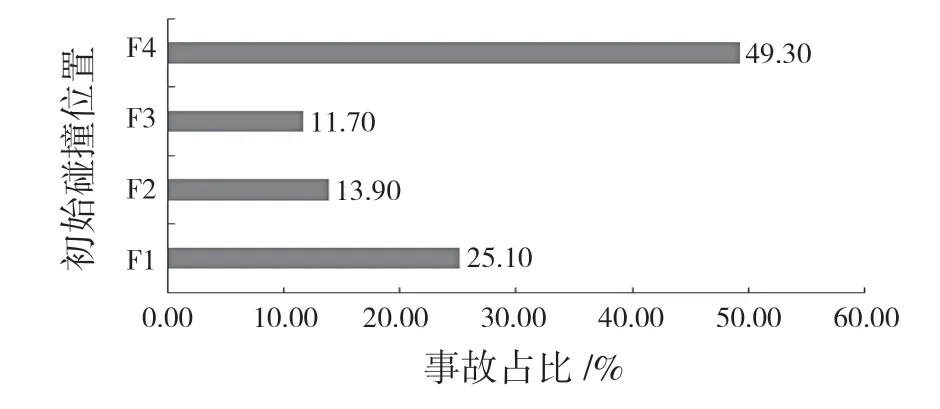
图5 行人碰撞位置分布Fig.5 Pedestrian collision location distribution
碰撞前车辆行驶速度与行人横穿道路速度对AEB 系统参数的选取有着直接影响,本文对事故中车辆与行人的速度进行特征分析,结果如图6、图7 所示。车辆速度大部分在40~60 km/h,占比62.1%,均值为56.2 km/h。行人横穿速度主要分布在0~10 km/h,速度均值为5.83 km/h,考虑行人缓慢行走速度接近步行速度,因此把行人分为步行和奔跑2 种状态。
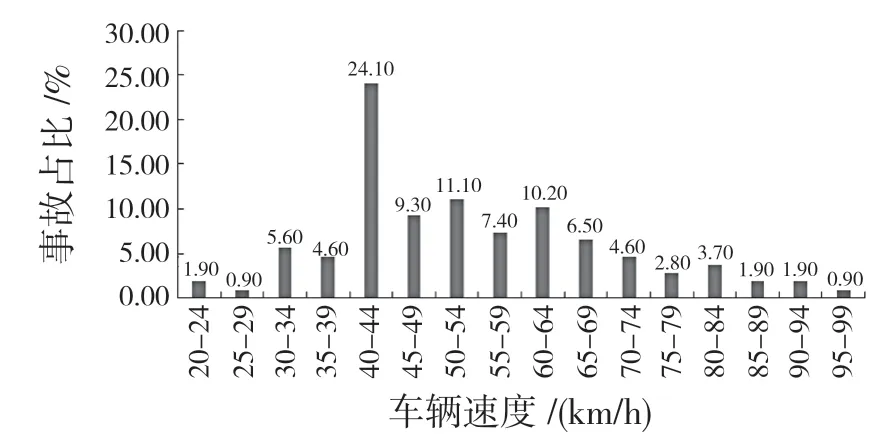
图6 车辆运动速度Fig.6 Vehicle moving speed

图7 行人运动速度Fig.7 Pedestrian moving speed
2.3 测试场景
在对事故数据进行分析时,因与事故发生的相关因素较多,不利于AEB 系统关键参数的确定,因此结合C-NCAP 行人AEB 测试规范与事故发生时间、车辆碰撞前速度、行人横穿道路速度等关键信息的特征分析进行聚类,构建了3 类典型行人横穿测试场景,如表1 所示。

表1 行人横穿测试场景Tab.1 Pedestrian crossing test scene

(续表)
3 传感器探测角优化
3.1 控制算法
目前车辆行驶的安全状态判别方法主要有基于车距和基于时距判别法[10],本文采用后一种算法,即碰撞时间(Time to Collision,TTC)模型算法。AEB 系统依据时间指标TTC 来判别与行人发生碰撞的可能性,然后控制车辆采取相应动作,以达到避免碰撞事故发生。
TTC 模型算法公式为

式中:d——车辆与行人的纵向距离,m;vrel——车辆与行人纵向相对速度,m/s。
在针对传感器探测角进行优化时,选用PreScan软件中AEB系统自带的一级全力制动策略。
3.2 基于测试场景优化探测角
传感器探测范围由探测距离R和探测角θ表示,文献[4]认为,在行人AEB 系统中,传感器探测角比探测距离更为重要。基于PreScan 软件搭建测试场景,在场景中设置行人步行速度为5 km/h、奔跑速度为9 km/h,调整时间改变光照条件,设置R为60 m,θ选用50°,60°,80°三种主流传感器探测角进行仿真,3 种测试场景仿真结果如图8 所示。


图8 不同探测角下的碰撞速度Fig.8 Collision velocity at different detection angles
在测试场景1 中,探测角为50°和60°时,车速在40 km/h 以下均可避免碰撞,探测角为80°时,车速在50 km/h 以下可避免碰撞;当3 种探测角均发生碰撞,对比可看出探测角为80°时,车辆与行人的碰撞速度最低。同样的方法应用于其他2 种测试场景,在场景2 中,探测角为80°效果最好;场景3 中,探测角为50°效果最好。对3 种测试场景下每个探测角避免碰撞时,车辆与行人的避撞停止距离进行累加,得出探测角度为80°时距离最小,所以传感器最优探测角为80°。
4 AEB 控制策略优化
系统自带的制动策略无法满足驾驶舒适性及制动效率,因此对AEB 制动策略进行优化,考虑采用分级制动原理对车辆进行控制。
4.1 分级制动策略
在事故发生时,汽车EDR 会记录碰撞前5 s车辆速度变化数据,在筛选的108 例案例中有51例含有EDR 数据。对车辆EDR 触发数据进行分析,得到碰撞前各时刻相应的制动减速度,求出事故发生前车辆的平均制动减速度,如图9 所示,平均制动减速度的均值为4.3 m/s2。

图9 事故平均制动减速度Fig.9 Average braking deceleration of accidents
在真实的交通环境下,AEB 系统主动制动需要一个合适的时间阈值,才能给驾驶员带来安全和舒适的双重保障。文献[11]表明,事故避撞率整体趋势随着制动减速度的增大而增大,但增大有一定限度,在制动减速度达到7.8 m/s2时,避撞率基本不再增加。
考虑驾驶舒适性及制动效率,本文中AEB 系统采用分级制动原理对车辆进行控制。控制原理设计:当TTC=3.6 时,AEB 系统进入预警模式,提醒驾驶员有潜在危险出现。若驾驶员没有采取动作解除预警,在TTC=1.6 时,AEB 系统进入预制动环节,对汽车输入4.3 m/s2的制动减速度进行避撞;如预制动没有使汽车停下且驾驶员无立即制动汽车的动作,在TTC=0.6 时,AEB 系统则进入全力制动环节,即对汽车输入7.8 m/s2的制动减速度,直到汽车停止或者与行人发生碰撞。
4.2 验证分析
采用控制变量法对AEB 控制策略进行验证,即利用Simulink 搭建控制策略,其他参数设定为固定值,然后与搭建的场景进行联合仿真。2 种策略下得出碰撞速度结果如表2 所示。

表2 3 种测试场景下不同策略的碰撞速度Tab.2 Collision speed of different strategies in three test scenarios
从表2 中可看出,在3 种场景测试时,采用分级制动策略可以避免低速工况避撞,在速度较高时仍然不能完全避免人车碰撞事故的发生,但是相较采用一级全力制动策略,可明显看出分级制动策略的碰撞速度普遍降低,说明采用分级制动策略可以更好地避免人车碰撞事故的发生或者降低碰撞发生的严重程度。
5 结语
本文基于108 起行人横穿案例并对事故进行特征分析,得出3 类典型测试场景,通过联合仿真,对AEB 关键参数进行研究,得出如下结论:
(1)行人从左侧横穿事故基本发生在日间,右侧横穿的事故大部分发生在夜间和晨昏,说明右侧横穿事故受光线影响较大;
(2)在行人横穿事故中,统计发现车辆速度在30~85 km/h,相较C-NCAP 测试法规,在真实交通环境中,车辆在事故发生前的行驶速度更高;
(3)典型试场景下,行人AEB 系统关键参数最优组合为:采取分级制动控制策略,预警TTC=3.6 s;预制动TTC=1.6 s,制动减速度a=4.3 m/s2;完全制动TTC=0.6 s,制动减速度a=7.8 m/s2;传感器探测距离R=60 m,雷达探测角θ=80°。
本文建立的3 类测试场景不能完全代表行人横穿时的事故场景,且未考虑障碍物对行人AEB 系统的影响。在后续研究中将对转向车辆与行人横穿的场景进行研究,并重点考虑障碍物对传感器探测范围和控制策略的影响。
猜你喜欢
小学科学(2022年8期)2022-09-07
小猕猴智力画刊(2022年4期)2022-05-25
中学生百科·大语文(2021年4期)2021-05-12
意林(2021年5期)2021-04-18
舰船科学技术(2021年12期)2021-03-29
时代英语·高一(2019年1期)2019-03-13
扬子江(2019年1期)2019-03-08
小天使·一年级语数英综合(2017年6期)2017-06-07
智慧少年(2016年2期)2016-06-24
文苑·经典美文(2009年7期)2009-08-25
