一种用于皮影戏表演的可扩展机器人装置
2022-10-31 04:01:46廖海燕王婧怡希治远黄明扬余亚东庞飞
电子制作 2022年18期
廖海燕,王婧怡,希治远,黄明扬,余亚东,庞飞
(绍兴文理学院 数理信息学院, 浙江绍兴,312000)
0 引言
皮影戏作为中国首批非物质文化遗产,历经千年生生不息,但面对日新月异的时代,其传承之路举步维艰,近年来我国公开的皮影戏发展动态数据整合显示,其“模式旧”成为皮影艺术向前发展的最大挑战。
从国内外研究我们发现,数字化技术现在已经成为一种主流的传播形式,将皮影艺术与数字化和机械融合,为传统文化注入新的时代气息,将传统皮影的优势特点与现代的科技相结合,推陈出新,制作出符合当代人们喜闻乐见的新式皮影戏,是未来皮影艺术的发展方向。皮影艺术的数字化我们能挖掘的内容还有很多,可以与数字艺术相结合的内容也有很多。
基于此,在如今科技发展迅速的时代背景下,皮影表演也需要在继承传统的基础上大胆改革创新。本文介绍了一种用于皮影戏表演的可扩展机器人装置,本设计充分运用了分层指令集等技术,将单片机系统结合滑轮、联轴器等机械零件设计出了皮影戏表演的机器人装置。
1 总体设计
该装置的结构主要由动作编排系统、主从机通信系统、机电控制执行系统三大部分组成。其运作流程如图1所示,组成框图如图2所示。
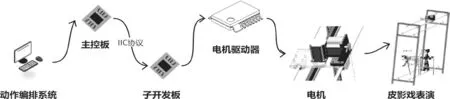
图1 运作流程
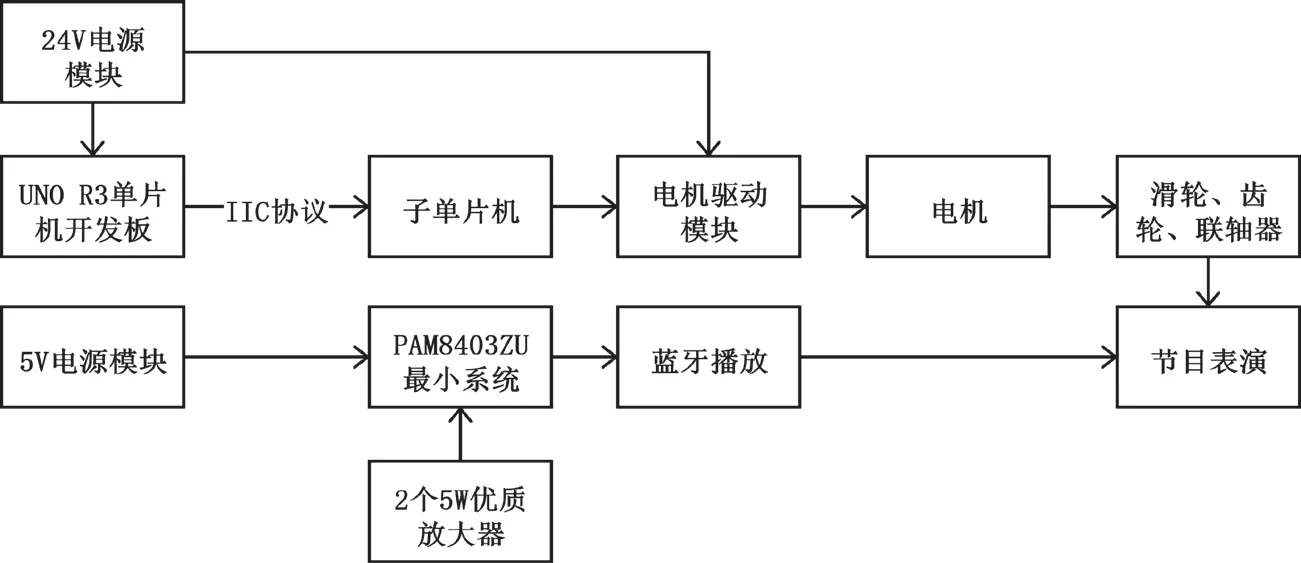
图2 系统整体框图
本系统由两个24V电源供电,该机器人表演系统启动后,由秒钟层控制的独立指令根据时间轴组合编排至分钟层或时钟层,主机接收到计算机编排好的动作指令,将通信模块触发后,通过I2C总线进行ATmega芯片系统之间的数据通信和传递,最后由电机控制执行系统中的机械零件,带动影人开始表演。
程序运行完成即表演完成时,整个系统将回到初始状态,若表演未结束则继续完成未完成动作。
2 硬件模块设计
2.1 控制模块
主控板选取MEGA2560 R3单片机开发板,先确定I2C总线设备挂载,再运行完成各个动作的任务调动,将每个支点任务传送到子开发板。该单片机是一种集成电路(IC),以ATmega 16U2作为主控芯片,调试信息串口输出,通过I2C协议进行系统间的通信,核心处理器是AVR,具有先进的RISC体系结构。我们无需额外的编译器,直接连接电脑USB接口,即可使用IDE进行表演动作的编程、编译、烧录,然后将数据送到指定寄存器即可。

图3 电路原理图
2.2 通信模块
采用主从机通信,每个从机控制一个皮影人物的关节,主机通过I2C接口给从机发送控制命令,从而使得控制逻辑清晰,增加或减少关节时只需在主机中添加或删除相应的程序模块即可,极大的提高了系统的易用性,增强了系统的适应性和可扩展性。
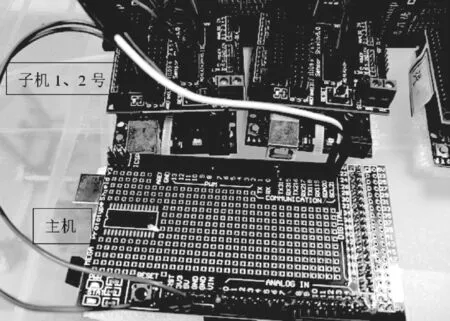
图4 主从机控制
2.3 执行模块
执行部分主要由57mm 2相步进电机组成,该电机具有低温升和低噪音的优点,该设计主要依靠齿轮传动和滑轮转动来实现三个自由度的机械动作。首先每个支点由两个电机组合调控,分别依靠齿轮以及滑轮传递动作,实现左右移动和上下移动;而位于底部的电机控其完成转身动作,从而实现三个自由度的完美结合;选择齿轮齿条的传动,可以使得工作平稳,可靠性高,能保证恒定的传动比,传递任意夹角两轴间的运动。而其整体的外部框架采用铝材、钢材的构成支架结构,在轨道中固定起支撑作用的底座、多个滚轮套件、若干支撑杆以及压紧螺栓,这样的结构组合使表演平台的稳定性得到了进一步提升。

图5 电机结构
2.4 蓝牙模块
为了增加人物表演的生动性,我们选用XH-A158超清蓝牙功放板播放音乐。该蓝牙模块主要由两块PAM8403芯片构成,PAM8403是一种D类音频功率放大器 IC,具有谐波失真低、噪声串扰小的特点使其对声音的重放得到较好的音质。连接了两个5W功率的优质扬声器,配接合适的皮影戏曲目可以放大4倍的音量并自由调整其节奏,使其与动作匹配。
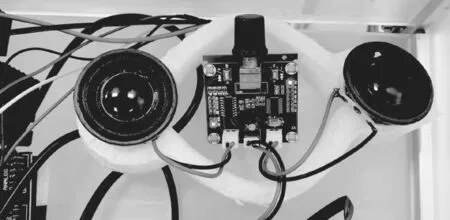
图6 蓝牙模块
3 软件控制设计
3.1 分层控制系统
基于分层指令集技术设计皮影戏动作编排系统。指令集分为三层,第一层指令由若干能独立完成一套动作的指令构成,每个第一层指令又可以分解为若干第二层指令,每个第二层指令都分别可以完成一个独立动作,每个第二层指令又可以分解为若干第三层令,每个第三层指令控制各个关节(节点)的运动。
3.2 基于ROS机器人操作系统
构建分布式的进程(或称为节点)框架,每个子节点作为一个进程,向主节点订阅指令,主节点根据节目内容按时间顺序发布指令,控制各个关节协调动作,演绎完美的节目。
3.3 代码自动生成系统
该系统根据动作编排系统输出文件自动生成代码,按时间顺序设定各个皮影角色动作,包括动作幅度、持续时间等参数,代码自动生成系统首先将角色动作指令分解到各第三层,然后将第三层指令分配至各个节点,在此基础上生成驱动各个节点的代码。
4 系统创新分析
4.1 动作编排自动化
分层指令集大大降低了软件的使用难度,使得皮影戏制作人员可以专心进行皮影戏内容创作,无需过多关注皮影角色动作的具体实现方法,同时皮影戏制作人员在编排内容时可以快速观看皮影角色动作效果并反复改进,大大提高皮影戏制作效率和表演效果。
4.2 机电控制一体化
该机器人系统硬件模块集开发板、驱动器等机电装置为一体,只要依靠后台程序的程序操控,就能智能控制表演全过程,并且该机器人的设备较简单成本较低,易于推广使用。
4.3 皮影表演精细化
数字化的机器人表演模式是结合传统文化与数字科技的新型表演形式,相较于传统表演需要反复排练才能完成一场皮影戏,该系统通过联轴器等机械元件挥舞皮影人物,后台制作人员在编排内容时可以根据需求观看皮影角色动作效果,无需排练即可精准表演。
5 装置功能测试与分析
首先计算出人物的转动角度、动作时间等参数,结合电机的步距角为1.8o进行插值量化,基于MCU微控制器编程技术构建分层指令,将关节数据(如位置、速度信号以及各种通讯信息)转化得到关节位置变化或转速,再通过Arduino完成人物角色的动作编排程序,并将程序烧录到主单片机开发板。
程序烧录完成后,控制指令依次完成从主机、子机、驱动器到电机的传递。开发板和扩展板基于I2C通信协议传递数据,每个驱动器接收到该支点的转动数据后驱动电机,每个步进电机基于电机微分驱动技术以及控制寄存器的设置执行特定功能。
电机驱动器通过PID算法自动控制电机,辅以滑轮、导轨、齿轮等机械零件,在步进电机达到3%高精度的基础上,由伸缩绳连接滑轮、弹簧连接动作支点人物带动手部及头部的位置变换,由刚性联轴器实现人物整体的旋转变化,通过以上动作的不断变化从而完成表演。

图7 表演系统测试
本装置通过不断地将各模块细化调试,成功地完成了较为完整的皮影戏表演节目测试,其中有自创曲目《猴王戏虎》以及创新曲目《小猪佩奇》等表演。
同时本设计装置的技术可推广使用,不仅可以在大型舞台上实现皮影大幅度的动作变换,而且通过数字化媒体配以唱腔故事,不需要排练就可以避免出现错误的动作。
6 结束语
本设计打造演绎皮影剧的可扩展机电控制系统,实现数字化的皮影戏表演,从而提高表演效率。通过智能化的皮影艺术,在科技飞速发展时代,将传统的地域文化升级,使人们对非遗文化的数字化保护重视起来,走出遗失的困境,实现非物质文化遗产的创新发展和永续传承,同时争取将智能化表演模式快速推广。
本文通过对皮影戏表演机器人装置系统各功能设计及实现的相关介绍,较完整地阐述了系统从模块到相关功能实现的过程,并通过对相关表演功能进行测试,表现该系统的整体表演性能较为优良,系统的稳定性和可靠性较高,达到预期的设计目的。
猜你喜欢
科普童话·神秘大侦探(2023年1期)2023-05-30 12:48:10
大灰狼画报(2022年6期)2022-08-06 07:39:30
小学生优秀作文(低年级)(2020年11期)2020-12-14 03:10:14
读友·少年文学(清雅版)(2020年4期)2020-08-24 07:36:20
少儿美术(2019年1期)2019-12-14 08:01:34
读友·少年文学(清雅版)(2019年5期)2019-09-18 01:06:40
测控技术(2018年5期)2018-12-09 09:04:26
电子测试(2018年18期)2018-11-14 02:30:34
创新作文(小学版)(2018年7期)2018-08-20 03:11:00
小天使·四年级语数英综合(2017年4期)2017-04-18 17:43:20