移动平台多传感器组合导航系统设计
2022-10-28 04:26吴焱明仲彦霖
机械工程与自动化 2022年5期
吴焱明,李 昂,李 正,仲彦霖
(合肥工业大学 机械工程学院,安徽 合肥 230009)
0 引言
牵引变电所有很多高压设备,人在进行设备检测时存在安全问题,因此随着科技的不断进步,实现无人化巡检是电气化铁路发展的必然趋势。当前移动平台采用磁条导航的方式,在控制室路面上铺设磁条,工控机通过磁导航传感器采集磁条信息控制移动平台的运动。定位方式采用RFID技术,提前在地标卡中写入信息,移动平台运行时利用车载读卡器读取信息内容,判断当前所处的位置。但是磁条导航方式存在脱轨的问题,需要人为将移动平台推回轨道上。因此,本文作者结合视觉SLAM技术改进移动平台的导航和定位系统,以实现变电所的无人化和自动化巡检。
1 移动平台的结构
移动平台上方需搭载检测机器人,考虑承载能力和操作的便利性,设计的机械结构如图1所示。车体长为750 mm,宽为560 mm,高为400 mm。
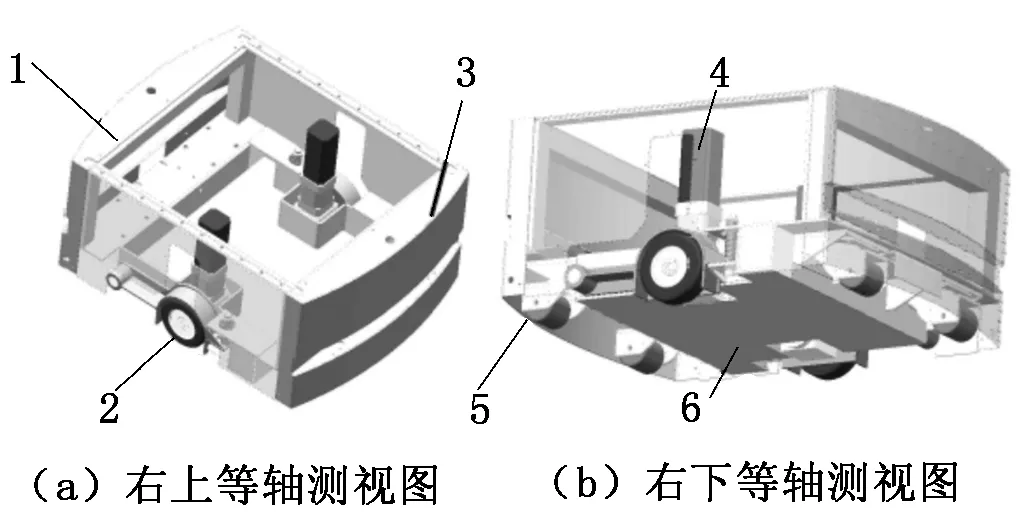
1-后端壳;2-主动轮;3-前端壳;4-电机;5-从动轮;6-底盘
2 控制系统的硬件设计
移动平台组合导航系统采用以计算机为核心的上位机和以可编程逻辑控制器(Programmable Logic Controller,PLC)为核心的下位机联合控制方案[1]。上位机采用研华PPC-3120S型工控机和装有Ubuntu 16.04系统的笔记本。PLC与工控机之间采用Modbus TCP协议的网口通讯,与伺服驱动器之间采用CAN总线通讯,因此采用台达AS200系列的PLC[2]。双目和单目相机需要依靠运动时的图像特征匹配来计算深度,而深度相机可以直接测量距离,节省计算时间,因此选择深度相机。Kinect V2相机在设备上的安装图如图2所示。
磁导航传感器采用欧米麦克MK-0216B系列,该系列传感器的测量精度能达到±1 mm。除此之外,还有用于定位的EMR-05型RFID射频传感器。控制系统总体结构框图如图3所示。
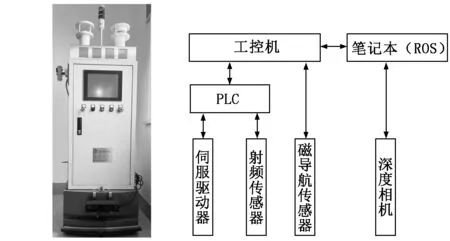
图2 设备安装图 图3 控制系统总体结构框图
3 控制系统软件设计
移动平台控制系统分为上位机软件和下位机软件两个部分。
3.1 下位机软件设计
下位机软件实现磁条导航时的点动、旋转和到目标运动,视觉SLAM导航的自主运动,以及脱离轨道和重回轨道时导航方式的切换等功能。
3.2 上位机软件设计
3.2.1 地图构建模块
(1) ORB-SLAM2[3]算法:包括相机跟踪、地图构建和回环检测三个模块。相机跟踪模块的作用是根据深度相机获取到的信息估计位姿并检测新的关键帧。地图构建模块负责插入检测到的新关键帧,经过局部BA优化后剔除不符合条件的地图点和关键帧。回环检测模块的作用是检测是否到达过该场景,消除系统的累计误差。
(2) 稠密地图构建:ORB-SLAM2系统只能构建稀疏地图,无法用于导航和路径规划,因此改进该算法实现稠密建图。相机的成像过程涉及到三个坐标平面,即相机坐标平面、像素平面和物理成像平面。三者之间的关系如图4所示。
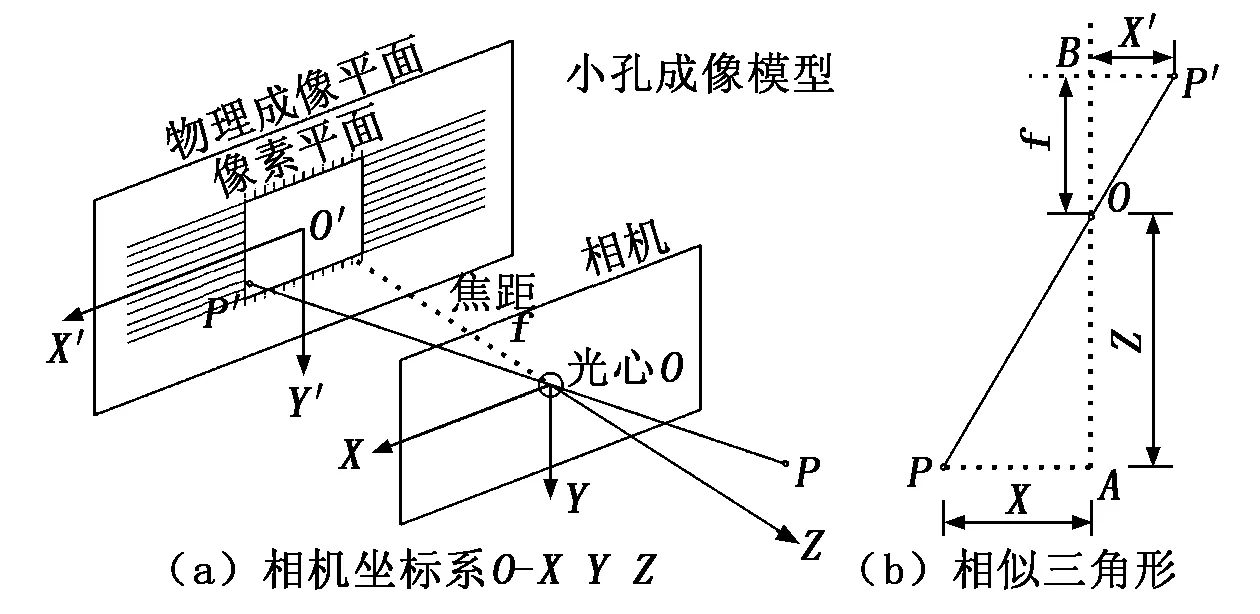
图4 相机模型
假设点P在相机坐标系下的坐标Pc为[X,Y,Z]T,投影在物理成像平面上的坐标为[X′,Y′,Z′]T。设相机的焦距为f,则:
(1)
像素平面相对于物理成像平面在水平方向上缩放了α倍,竖直方向缩放了β倍,原点平移了[cx,cy]T。把αf记作fx,βf记作fy,可以推出点P在像素平面下的坐标[u,v]T:
(2)
其中:fx、fy、cx和cy为相机内参。
RGB-D相机采集图像的像素坐标值,测量目标的深度d,根据式(2),相机坐标Pc可以表示为:
(3)
其中:s为深度比例系数。由ORB-SLAM2算法的相机跟踪模块估计出相机的外参,即相机坐标系变换到世界坐标系的旋转矩阵R和平移向量t,因此可推出P点的世界坐标:
Pw=RPc+t.
(4)
首先采用点云库[4]中PointXYZRGBA类型存储世界坐标值和颜色信息,然后再进行点云拼接即可得到点云地图。经体素滤波器[5]优化后,保证了在某一个确定的体素内仅有一个点,减少了内存空间的占用。
(3) 八叉树地图[6]构建:点云地图只能添加地图点,不能动态地移除某一时刻消失在地图中的点,因此不能用于导航和路径规划。本文采用八叉树地图解决上述问题,它是一种三维栅格地图,可以动态地描述节点的占据状态。
3.2.2 导航模块
基于ROS平台设计视觉SLAM导航系统。全局路径规划采用A*算法[7]计算从起始点到目标点的最优路径。局部路径规划采用时间弹性带算法[8]躲避障碍物,并计算出该行驶周期内的角速度和线速度。
如果移动平台脱离磁条轨道,则导航系统切换至视觉SLAM导航,以系统中预设的轨道上的点为目标点,自主导航回到轨道。
4 基于ROS的算法测试
移动平台要搭载检测机器人进行巡检,现场平面布局如图5所示。其中Pi(i=1,…,6)为SLAM导航的目标点,其余为各个巡检位置。
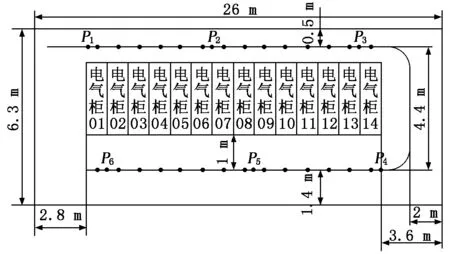
图5 工作环境平面布局
基于ROS系统测试改进的ORB-SLAM2算法,滤波后的稠密点云地图和八叉树地图如图6所示。
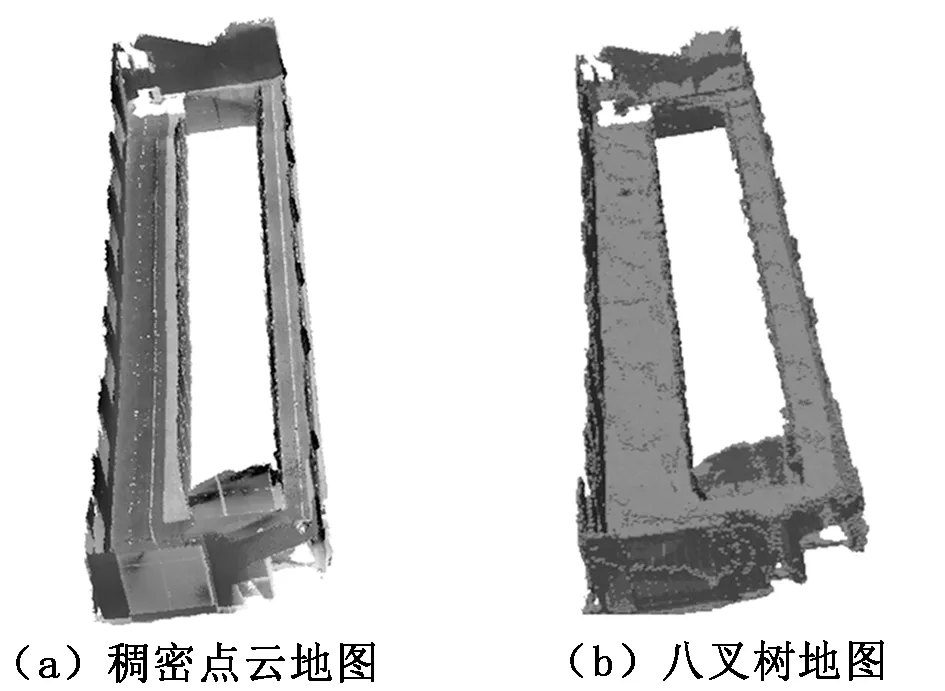
图6 供电段环境地图
图6(a)是滤波后的稠密点云地图,大小为264.7 MB,图6(b)为相对应的八叉树地图,大小为236.3 kB。投影在二维平面的栅格地图如图7所示。
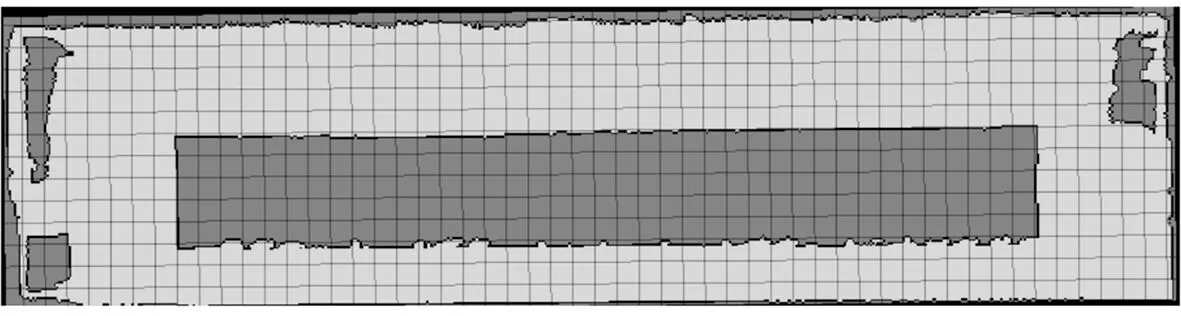
图7 二维栅格地图
5 设备调试
首先,设定好目标位置g,移动平台通过磁条导航的方式运行,在图8所示位置脱离磁条轨道。
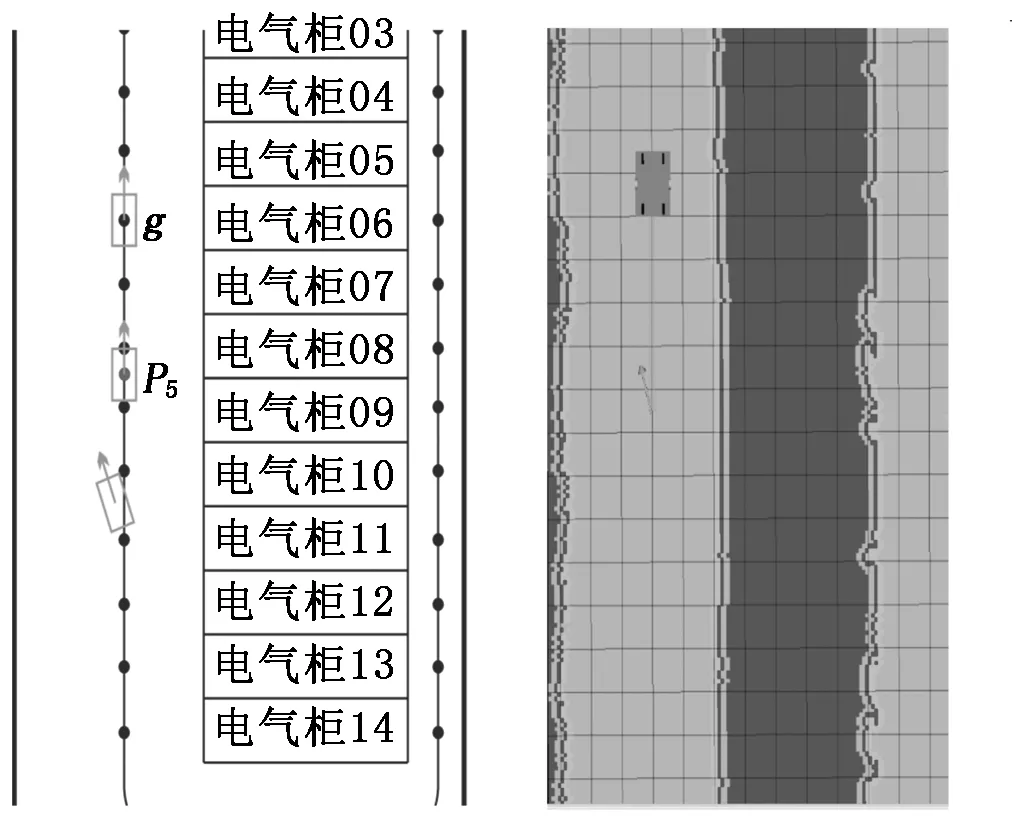
图8 导航示意图
当磁导航传感器检测到移动平台脱离磁条,切换为视觉SLAM导航方式,自主运行到轨道前方较近的SLAM导航目标点P5。调整好位姿之后,视觉SLAM导航方式结束,磁导航传感器读取到信息,切换回磁导航方式,继续运行至目标位置。
6 结束语
目前,基于视觉SLAM和磁条的移动平台组合导航系统已经开发完成。经测试,磁条导航脱离磁条轨道后,切换为SLAM导航方式可以自主导航回到轨道。该系统实现了变电站巡检的无人化、自动化和智能化,提高了巡检效率。
猜你喜欢
中学生数理化·高三版(2019年1期)2019-07-03
中国新通信(2016年24期)2017-03-08
试题与研究·高考数学(2016年1期)2016-10-13
铁道通信信号(2016年12期)2016-06-01
肇庆学院学报(2016年5期)2016-03-11
儿童故事画报·发现号趣味百科(2015年4期)2015-12-04
真空与低温(2013年1期)2013-12-04
小朋友·快乐手工(2009年4期)2009-04-28