上肢偏瘫康复机器人结构设计与仿真分析*
2022-10-28 05:03蔡国庆周利杰
机械工程与自动化 2022年5期
蔡国庆,李 杰,石 岩,周利杰
(1.河北省工业机械手控制与可靠性技术创新中心,河北 沧州 061001;2.河北水利电力学院 机械工程系,河北 沧州 061001;3.沧州市人民医院 康复科,河北 沧州 061001)
0 引言
偏瘫是脑卒中常见的后遗症,严重影响患者日常生活[1]。随着我国人口老龄化程度提高,康复需求将进一步增加,而康复机器人能够有效解决当前问题[2]。目前,国内外一些机构、院校已经将机器人应用到康复领域,并取得了一定的进展。日本筑波大学[3]、韩国科学技术院[4]、西安电子科技大学[5]、上海康复器械工程技术研究中心[6]等都对康复机器人进行了设计研究。但现有的这些上肢康复机器人存在训练形式单一、关节复合锻炼程度不高等不足。本文设计了一种6自由度上肢康复训练机器人,可以完成肩、肘、腕关节的康复训练,并通过仿真分析验证了其合理性。
1 康复机器人结构设计
1.1 自由度的选取及运动范围的确定
通过对人体上肢解剖结构分析可知,肩关节有5个自由,肘关节有1个自由度,腕关节有3个自由度。考虑康复训练需求及上肢穿戴空间的局限性,机器人选取肩部屈伸、收展、内外旋运动,肘部屈伸运动,前臂旋转运动和腕部屈伸运动进行设计。关于外骨骼结构尺寸,根据我国人体尺寸标准GB10000-88给出,如表1所示,各关节康复运动范围如表2所示。
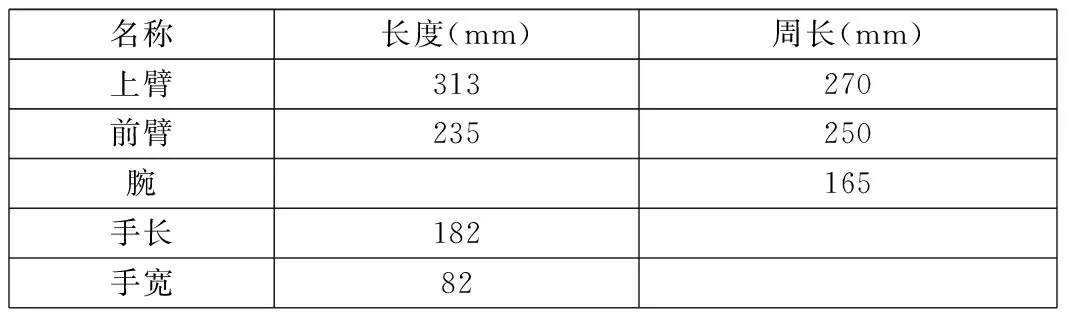
表1 人体上肢尺寸参数
1.2 结构设计
根据选取的自由度,设计康复机器人的整体结构,其三维模型如图1所示。肩部屈伸轨道1与机架固定,电机2装于肩部屈伸轨道1,通过齿轮3带动扇形齿圈4旋转,完成肩部的屈伸运动。屈伸齿圈连杆5与扇形齿圈4固连,电机6装于屈伸齿圈连杆5,带动上臂连杆7完成肩部的收展运动。上臂连杆7末端为扇形轨道,电机10置于上臂连杆7上,通过齿轮8带动扇形齿圈9旋转,完成肩部的内外旋运动。内外旋齿圈连杆11与齿圈9固连,电机12置于内外旋齿圈连杆11上,带动前臂连杆13旋转,完成肘部的屈伸运动。前臂调节板14通过螺栓与前臂连杆13连接,通过3对螺栓孔调节长度。电机15置于前臂调节板14上,带动腕部连杆16旋转,完成腕部屈伸运动。电机17置于腕部屈伸连杆16上,带动把手18旋转,完成前臂的旋前旋后运动。

1-肩部屈伸轨道;2,6,10,12,15,17-电机;3,8-齿轮;4,9-扇形齿圈;5-屈伸齿圈连杆;7-上臂连杆;11-内外旋齿圈连杆;13-前臂连杆;14-前臂调节板;16-腕部屈伸连杆;18-把手
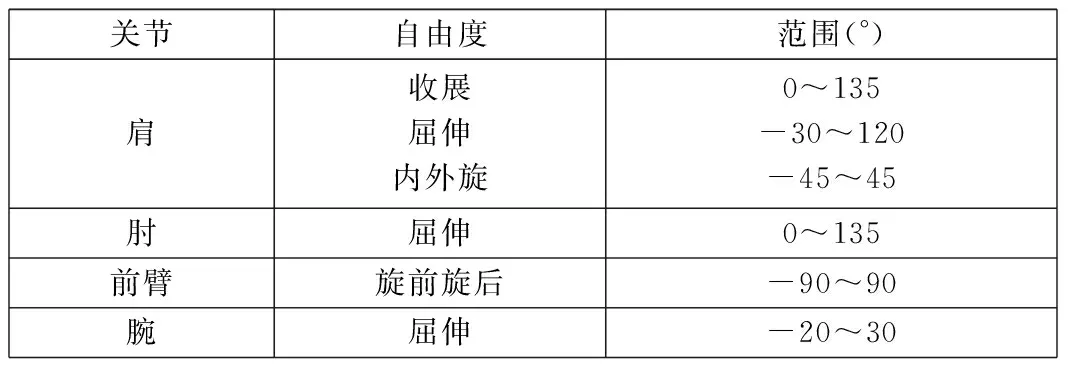
表2 人体上肢各关节康复运动范围
2 运动学分析
2.1 运动学建模
参照D-H参数法建立康复机器人坐标系,如图2所示,得到机器人连杆长度ai-1、连杆转角αi-1、连杆偏距di、关节角θi,见表3。
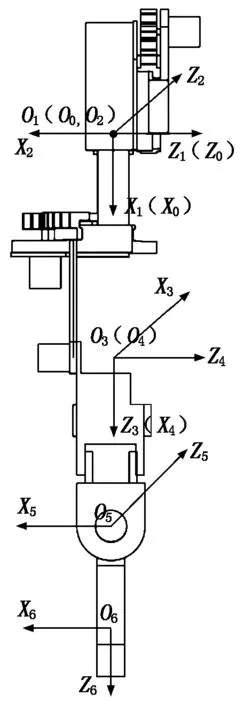
图2 机器人连杆坐标系
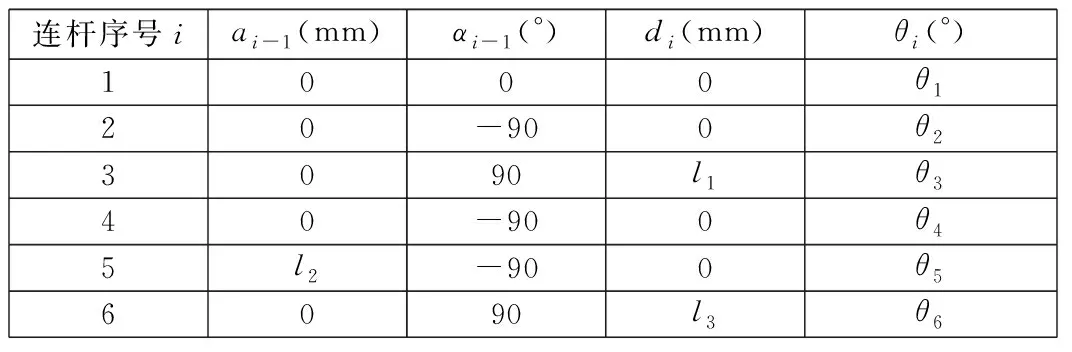
表3 D-H连杆参数表

Rot(x,αi-1)Trans(ai-1,0,0)Rot(z,θi)Trans(0,0,di)=
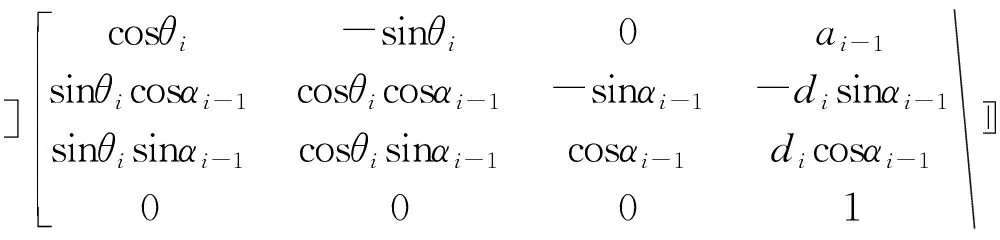
(1)
(2)
2.2 运动学模型仿真验证
根据表3中的参数,应用MATLAB建立机器人运动学模型。以肩关节外展90°与肘关节屈曲90°的复合康复运动为例对其进行仿真验证,结果如图3所示。由图3可以看出,机器人末端位姿与期望位姿一致,验证了运动学模型的正确性。
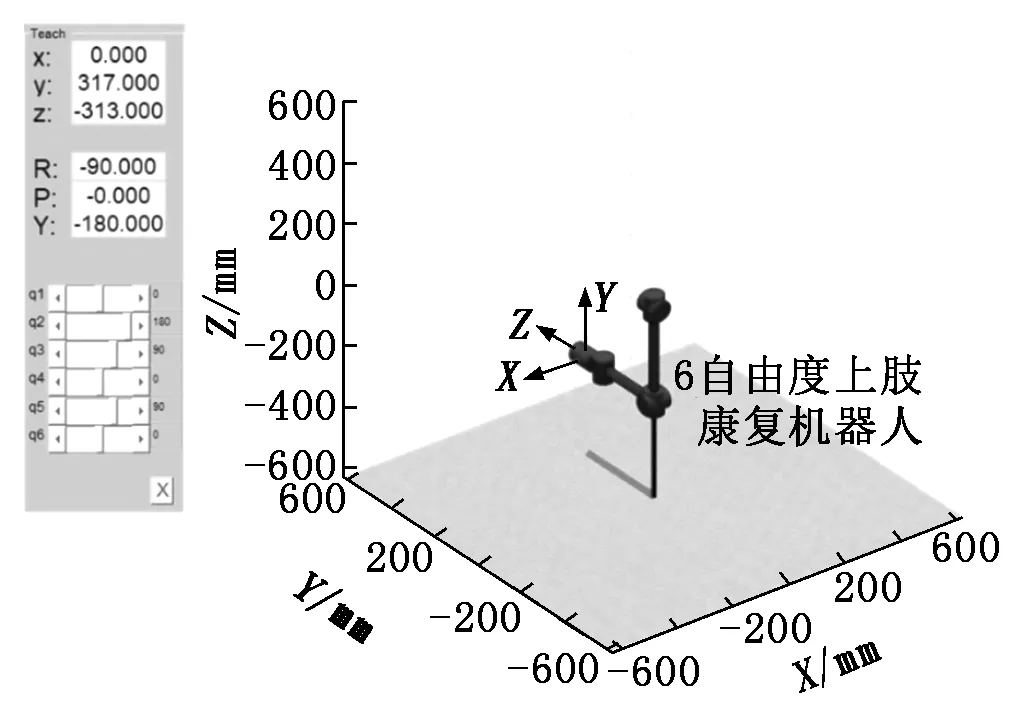
图3 肩关节外展90°与肘关节屈曲90°复合康复运动示教
2.3 运动学分析
本文以上肢最为常见的饮食、扩胸、抓物动作为例,应用ADAMS对康复机器人进行运动学仿真分析。机器人仿真时的初始位姿条件为θ1=0°,θ2=90°,θ3=90°,θ4=-90°,θ5=90°,θ6=0°,仿真终止时的期望关节角及角位移如表4所示。设定3个仿真动作均在匀速的条件下进行,仿真时间设定为5 s,各动作时把手位移曲线如图4~图6所示。由图4~图6可以看出:机器人末端在各个方向运动连续平稳,可以完成规划的康复训练动作。
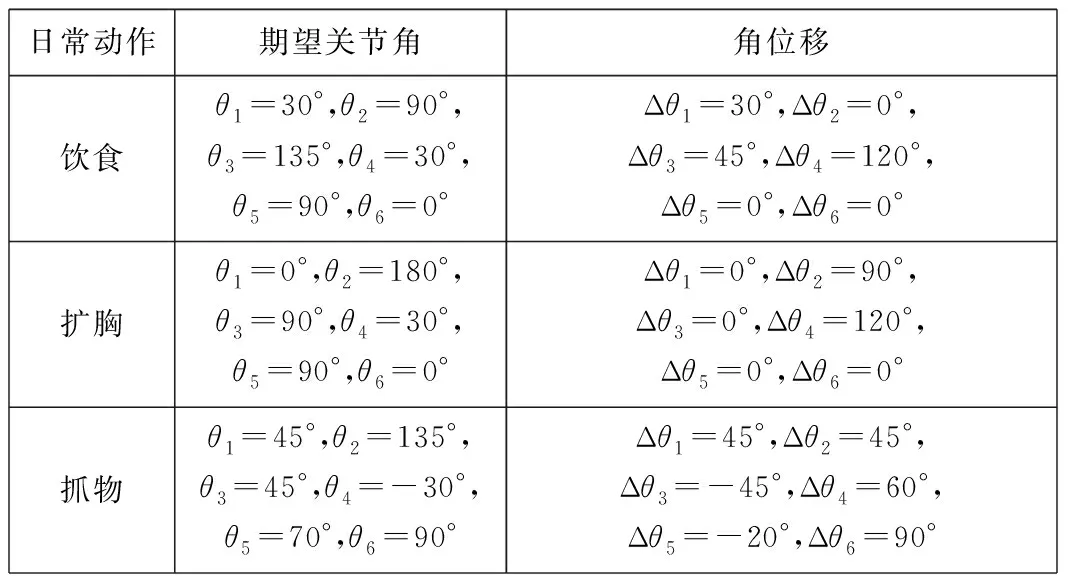
表4 康复训练动作仿真参数
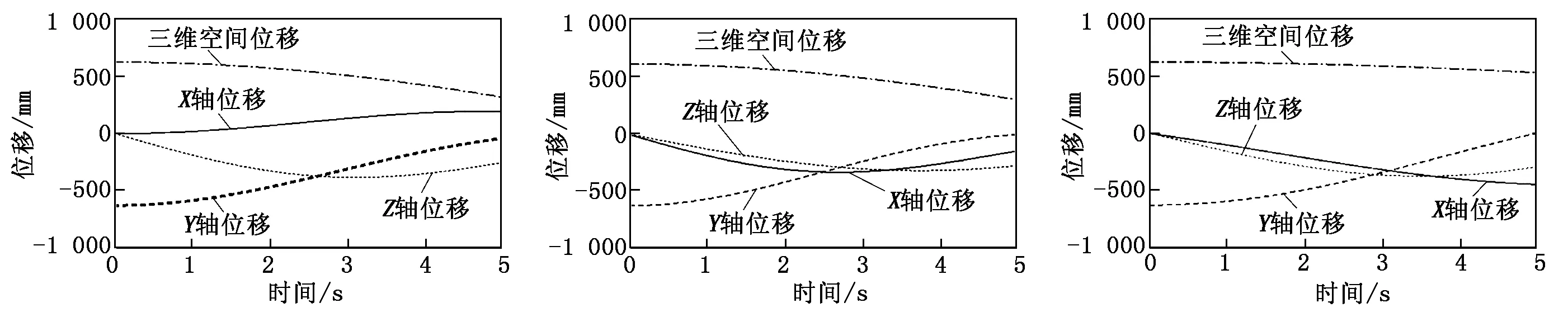
图4 饮食动作把手的位移曲线 图5 扩胸动作把手的位移曲线 图6 抓物动作把手的位移曲线
3 结论
针对当前康复机器人运动形式单一的问题,设计了一种6自由度康复机器人,并对其进行了运动学建模和验证。以饮食、扩胸、抓物动作为例对其进行了运动学仿真分析,证明了康复机器人结构设计合理,能够帮助偏瘫患者完成多关节复合康复运动训练。本文研究可为样机开发提供数据支撑。
猜你喜欢
实用手外科杂志(2022年2期)2022-08-31
河北省科学院学报(2020年1期)2020-05-25
机械设计与制造(2020年4期)2020-04-28
重型机械(2019年3期)2019-08-27
制造技术与机床(2018年11期)2018-11-23
时代汽车(2018年12期)2018-06-18
制造技术与机床(2017年11期)2017-12-18
西南军医(2016年5期)2016-02-20
海军航空大学学报(2015年1期)2015-11-11
中国医疗美容(2015年2期)2015-07-19