
无人机和地面三维激光扫描仪在1:500 城市基本地形图测绘中的应用
2022-10-26 11:28:00常志喜
科学技术创新 2022年29期
常志喜
(中国电建华东勘测设计研究院浙江华东建设工程有限公司,浙江 杭州 310030)
引言
随着城市的不断扩张,城市基础设施建设日新月异,地理空间信息也变得异常复杂[1]。为了更好地满足城市的规划、建设,管理城市的地理信息,需要不断地更新城市地形图,这离不开大量的基础测绘工作[2],特别是大比例尺的测图工作中,对测绘的精度和周期要求较高。在传统的测绘方法中,大量的测绘方法应用的测试设备主要集中在水准仪、经纬仪、移动基站RTK 和传统的航空摄影,这些测试方法和测试手段往往需要耗费大量的劳动力进行数据的采集和处理,导致生产效率低下,成果产出周期较长,也显得尤为不经济。近年来,消费级无人机倾斜摄影设备的快速发展,搭载的摄像头分辨率越来越高,测试功能也日益丰富,使得无人机倾斜摄影技术能够广泛地应用于地形测量、工程测绘、房地一体化测量、农村土地确权等领域,具有高效率、重量轻、低成本、操作灵活、数据精准等诸多优点[3]。地面三维激光扫描作为无接触的大比例尺测图方法,本文选择其作为无人机倾斜摄影成果的对比方法,以验证无人机倾斜摄影在大比例城市基本地图测绘中的可行性。
1 无人机倾斜摄影和地面三维激光扫描的测绘原理
1.1 无人机倾斜摄影的测绘原理 传统的航空摄影技术是以正射影像为理论基础的地理信息测绘方法,而无人机倾斜摄影技术则是伴随着遥感技术的演变以及消费级无人机设备的广泛应用而发展起来的一项新兴技术[4],它通过在飞行平台上搭载多个摄影传感器设备,从多个角度对地形地物进行影像采集,结合了正摄影像处理技术和倾斜影像处理技术,以高斯卷积运算实现了影响的尺度变换,如公式(1)所示,依赖三维实景建模处理软件对采集的三维影像数据以及像控点数据进行人工辅助的空三加密处理,以完全准确地重新构建地形地物的三维影像。利用无人机倾斜摄影在城市大比例基本地形图测绘中的应用流程如图1 所示。
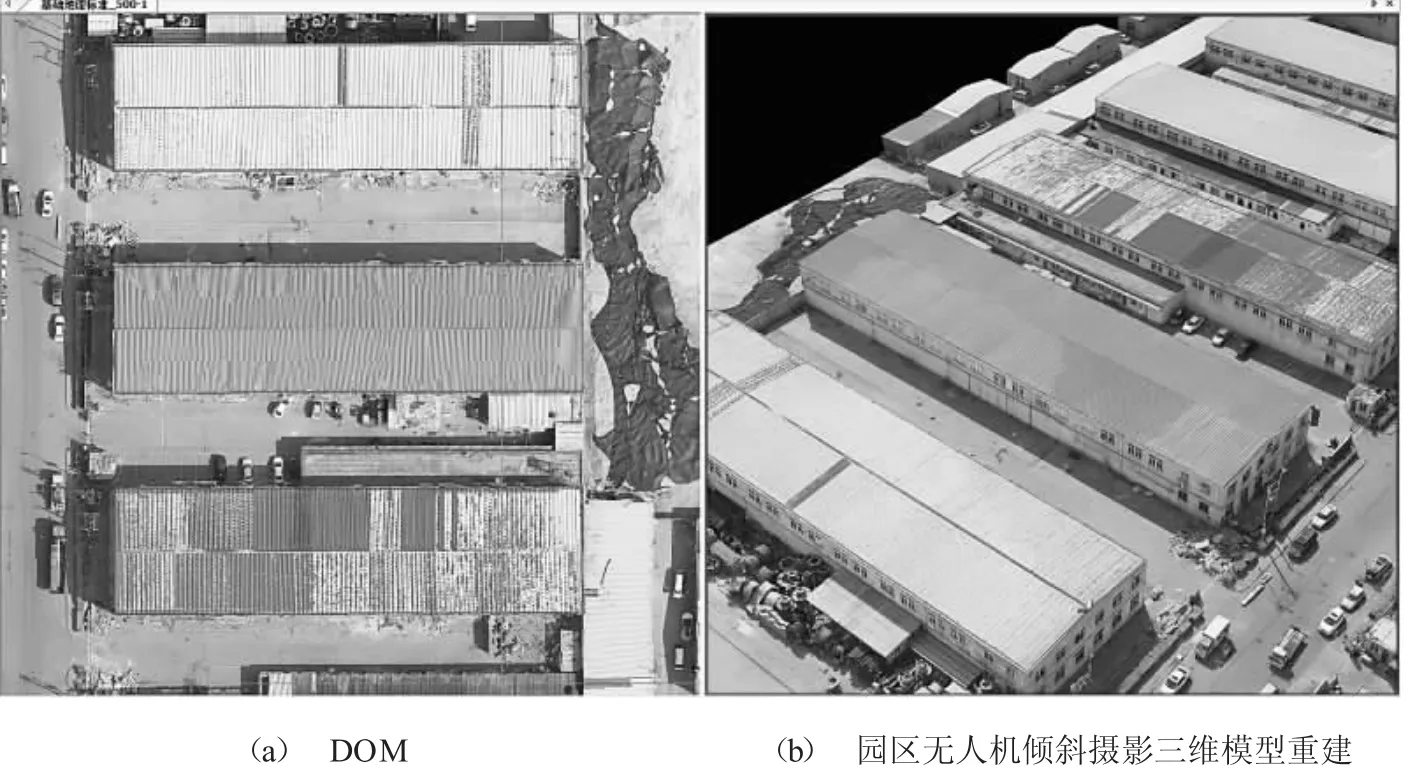
图1 无人机摄影技术的地物图像处理结果
式中:G(x,y,σ)为高斯函数;x、y 为平面坐标;σ 为卷积变换尺度;L(x,y,σ)为尺度空间;I(x,y)为二维图像。
1.2 地面三维激光扫描的测绘原理 地面三维激光扫描技术也是一种高新测绘技术,能够通过配备的LIDAR激光雷达扫描系统实现非接触的全景化高清三维彩色散点扫描[5]。扫描时,三维激光扫描仪器发射激光脉冲,测量光源与待测物体之间的垂直距离L,并旋转水平马达转动装置获取各激光水平扫描角度α,另外,三维激光扫描仪器也可以旋转垂直马达转动装置获得各激光垂直扫描角度β,依据几何换算关系可以获得待测物体任意点的三维坐标值,换算方法如公式(2)所示[6]。
式中:x、y、z 为待测物体的三维空间坐标值,m;α 为激光雷达水平扫描角度,°;β 为激光雷达垂直扫描角度,°;L 为激光雷达发射仪至待测物体表面点的直线距离。
2 工程测区基本情况
浙江省WZ 市某工业园区位于城市东北角,受到工厂生产以及封闭式管理模式的影响,工业园区四周修筑有花坛隔离带、围墙以及大门,测绘人员无法对园区内部进行访问。因此,传统的水准仪、经纬仪和移动基站GNSS-RTK 测绘方法的作业难度较大,不能够达到测绘目的。测区范围内的地形相对平缓,道路和场地已硬化,整个园区呈规则的矩形,南北向长度约650 m,东西向宽度约420 m,面积约273 000 m2。园区内分布的地物主要有工业厂房、道路、花坛、大门、停车场和井盖等,而园区外分布的地物主要有道路、建筑物等,成果需提供1:500 大比例尺地形图。本文尝试采用无人机倾斜摄影技术和地面三维激光扫描技术进行测量成果的综合对比分析。
无人机摄影测量设备为大疆精灵4RTK 智能航测无人机,图像三维处理软件为Context Capture Master 三维智能地理信息处理软件。无人机具备旋翼数量为6翅,桨叶类型为全碳纤折叠桨,起飞和降落方式为垂直起降,能够实现POS 辅助自动导航,搭载5 个传感器镜头,镜头垂直焦距为20 mm,倾斜焦距为30 mm,无人机设备的轴距为1 200 mm,典型的飞行高度达到60 m~750 m,最大飞行高度为4 500 m,典型的巡航速度不超过10s-1,最大旋转角度为250°/s,最大续航时间为30 min,卫星定位模块为GPS/GLONASS,影响位置精度≤±5 m,水平悬停精度为±1.5 m,可遥控距离为5km,遥控器工作频率为2.4 GHz~2.483 GHz。由无人机相机配备的传感器元件配置情况,可以计算得到摄影航高为750 m 时,对应的的地面分辨率为0.2 m,摄影航高为560 m时,对应的的地面分辨率为0.15 m,摄影航高为300 m 时,对应的地面分辨率为0.08 m,摄影航高为185 m 时,对应的的地面分辨率为0.05 m[7]。测绘时,无人机对园区的飞行时间约30 min,采集了正射影像350 张,倾斜影像620 张。
地面三维激光扫描测绘采用的是美国天宝公式(Trimble Inc.)高速三维激光扫描仪器Trimble X7,处理软件为Trimble Perspective。扫描仪器置伺服驱动EDM,集多镜头影像、自动校准、自动配准技术和测绘级自动整平多项技术融于一体,激光波长为1 550 mm,激光转速为200 线/s,视场为360°×282°,扫码时间为2′34″,最大扫描速度为500 kHz,测距进度为2 mm,单张照片的分辨率为3 840×2 746 像素,相机曝光间距15m[8]。测绘时,三维激光扫描对园区的扫描时长为1d,采集照片2 300 张。
3 无人机倾斜摄影和地面三维激光扫描的测绘结果分析
3.1 无人机倾斜摄影和地面三维激光扫描的图像处理对比 基于无人机倾斜摄影采集的影像,利用Context Capture Master 三维智能地理信息处理软件读取图像的可交换图像文件格式(EXIF 格式)和POS 数据(BLH 格式),人工设置坐标系,将BLH 格式转换成目标坐标系的坐标值x、y、z。依赖Context Capture Master 三维智能地理信息处理软件的空三加密解算功能,对影像图片进行三维模型的重建,实现图像从二维DOM域转变为三维模型,如图1 所示。从图中可以看出,构建的地形图平整度好,能清晰直观地反映地形地物的纹理和色彩,解算的三维模型具有高分辨率,通过软件能够任意获取地形地物点的空间坐标值,甚至可以提供TIF 格式的影像图切片,为地形图的利用提供良好的基础。
地面三维激光扫描通过发射激光无接触地获取海量的点云数据,如图2a 所示,随后利用Trimble Perspective 软件对数据的完整性、点云的质量进行检查,对不同测站不同方向扫描的数据,软件能够实现点源配准,将点云数据均转换到统一的坐标系下,通过点云拼接和点云数据滤波后,重构三维影像,如图2b 所示。从图中可以看出,地面三维激光扫描得到图片质量与无人机倾斜摄影得到的图片质量一致,表明采用这两种方法都应用于大比例尺城市基本地形图的测绘中,但是地面三维激光扫描技术需要耗费更多的外业时间,同时得到的云点数据量大,对设备内存配置、运行速率和存储空间等要求较高,内业编辑工作量略大,在时效性上无明显优势。

图2 地面三维激光扫描技术的地物图像处理结果
3.2 无人机倾斜摄影和地面三维激光扫描的精度对比 表1为无人机摄影技术和地面三维激光扫描技术的地物测绘精度成果对比。从表中可以看出,两种测绘方法得到的地物坐标结果十分相近,坐标x的误差△x 最大值为0.076 5 m,最小值为0.014 5 m,平均值为0.042 8 m;坐标y 的误差△y 最大值为0.079 8 m,最小值为0.008 3 m,平均值为0.051 2 m。坐标点的平面误差△xy(计算公式如公式(3)所示)
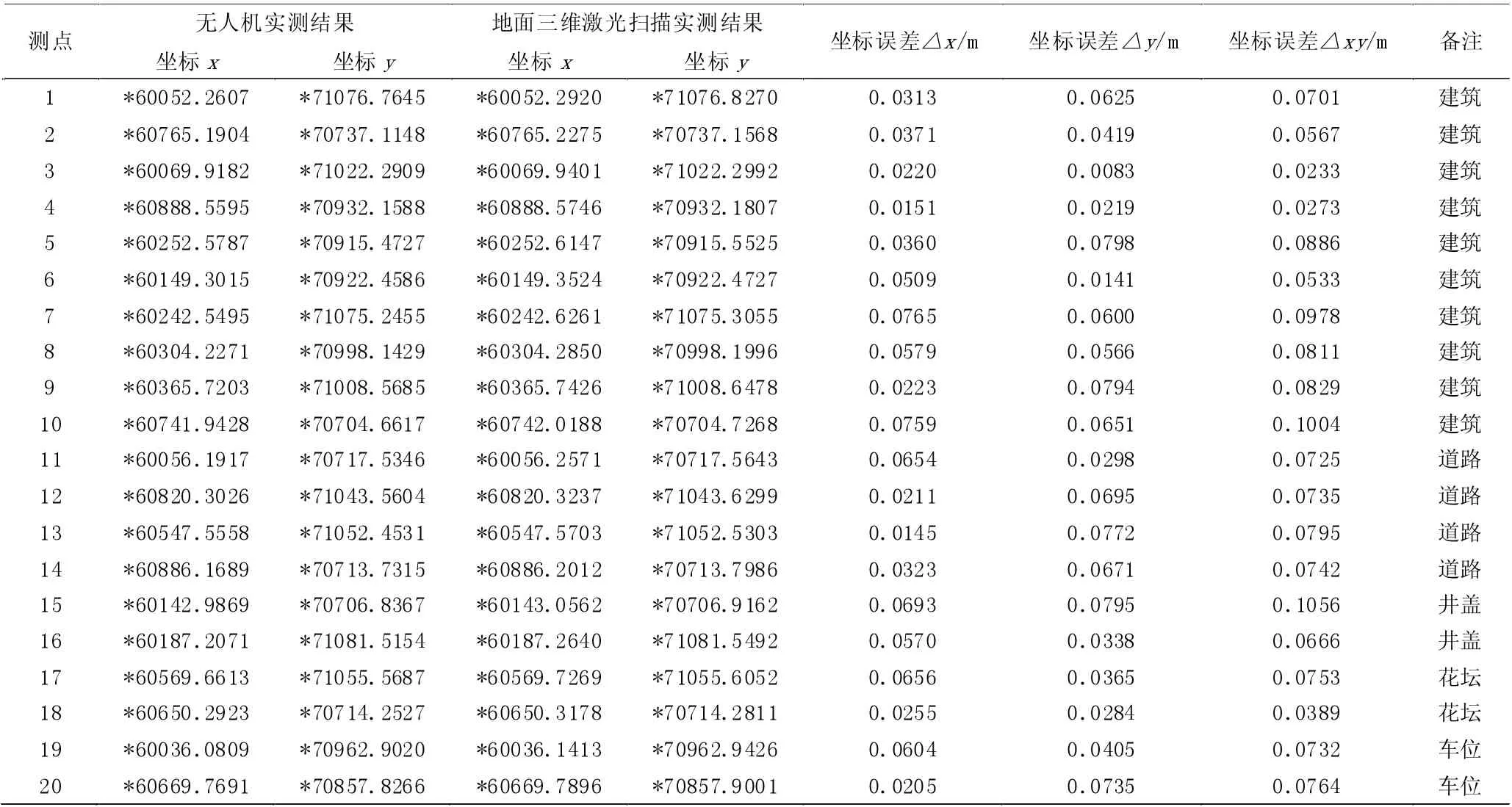
表1 无人机摄影技术和地面三维激光扫描技术的地物测绘成果对比

坐标点的平面误差△xy 的最大值为0.105 6 m,最小值为0.023 3 m,平均值为0.070 4 m。
由以上分析表明,无论是坐标x 的误差△x 还是坐标y 的误差△y 还是坐标点的平面误差△xy,其最大值均远远小于0.5 m,因此满足测绘成果规范的要求,无人机倾斜摄影在大比例尺城市基本地形图测绘中具有适用性,解译精度高。
4 结论
以浙江省WZ 市某工业园区地形图测绘为研究对象,采用无人机倾斜摄影和地面三维激光扫描技术相结合的方式对园区地形图数据进行采集,分别采用专用软件对采集数据进行三维模型构件,并对比两者的解译精度,得到以下几个结论:(1) 无人机倾斜摄影可实现二维和三维模型的相互转换,构建的地形图平整度好,能清晰直观地反映地形地物的纹理和色彩,解算的三维模型具有高分辨率,通过软件能够任意获取地形地物点的空间坐标值。(2) 地面三维激光扫描技术得到的云点数据量大,对设备内存配置、运行速率和存储空间等要求较高,内业编辑工作量略大,在时效性上无明显优势。(3) 无人机倾斜摄影得到的平面误差远小于0.5 m,满足测绘成果规范的要求,在大比例尺城市基本地形图测绘中具有适用性,解译精度高。
猜你喜欢
昆明医科大学学报(2021年6期)2021-07-31 07:40:36
科学(2020年5期)2020-11-26 08:19:24
浙江国土资源(2019年10期)2019-10-31 03:17:00
建材发展导向(2019年10期)2019-08-24 06:25:28
小哥白尼(趣味科学)(2019年2期)2019-04-17 02:18:18
中国公共安全(2017年7期)2017-10-13 08:18:11
电子制作(2017年9期)2017-04-17 03:01:00
发明与创新(2015年30期)2015-02-27 10:39:52
旅游纵览(2014年8期)2014-09-10 07:22:44
焦点(2014年3期)2014-03-11 23:03:43
