
基于无人机航摄影像的大比例尺测图及三维建模研究
2022-10-26 07:06窦叶贇DOUYeyun
价值工程 2022年29期
窦叶贇 DOU Ye-yun
(安徽省第三测绘院,合肥 230031)
0 引言
当前,无人机低空航摄完成了传统数据获取方式的有力补充,也弥补了卫星遥感等测绘手段在精度和及时性等方面的不足。无人机与倾斜摄影的结合,颠覆了传统测绘作业方式,在获取高清晰立体影像数据的同时自动生成三维地理信息模型,随着使用需求的提升,无人机倾斜摄影测绘系统正向着自动化、智能化、全面化、高效化的方向快速发展,无人机倾斜摄影三维模型上实现大比例尺图形采集成为必然,这也是促进无人机航测技术发展、促进其精准度和数据分析能力进一步提升的主要手段之一。
1 无人机航摄系统的组成以及理论基础
1.1 无人机航摄系统的组成
1.1.1 飞行平台
飞行平台是整个无人机航摄系统的基础构成,是指令接收单元也是指令发射单元,能够完成控制端飞行地点以及飞行高度的目标指令接收,并将相关指令通过成像传感器系统完成直接传输保证无人机航摄按照既定的航线完成飞行任务的执行。不同的飞行平台拥有不同的优劣势,其在应用的范围内也不尽相同(常见无人机飞行平台见表1)。

表1 无人机飞行平台特点
1.1.2 飞控系统
飞控系统包含导航、控制系统两个部分,辅助航摄任务完成导航和定位实现及时的接收路线质量修改,同时也肩负着航行姿态以及轨迹进行掌握记录的任务。
1.1.3 机载传感器设备
机载传感器设备用于完成航摄摄影相的获取,包括CCD数码相机、激光扫描仪以及磁测仪和多光谱成像仪等。通过遥感传感器能够获取含有丰富信息的影像,通过计算机的辅助处理,完成对图像的恢复、增强以及分类工作,从而真正发挥出信息的参考作用。倾斜摄影技术颠覆了正射影像垂直角度拍摄的局限,通过同一飞行平台的多台传感器的搭载能够完成五个角度的影像采集任务,能够得到高精度、高分辨率的数字表面模型(DSM)。
1.1.4 数据处理系统
数据处理系统是核心组成,保证了地面部分和无人机之间的通讯联系。系统不仅能够完成各类信息的接收,同时能够给予相关飞行参数以及导航轨迹等直接的显示。是整个无人机航摄相关信息的及时反馈,在完成数据获取的过程中需要保证适合的范围确定,同时再根据相应的比例以及降落场地完成有效连接,整个系统工作过程当中要注意避免障碍物以及无线电设备的影响。
1.2 无人机航摄系统理论基础
整遥感技术是技术核心,与传统的人工实地测量以及信息核实效率相比速度更快周期更短,利用不同波段的穿透性最大限度地获取物体的内部数据信息,在计算机辅助处理之下完成对遥感采集到的图像的恢复、增强以及分类工作正发挥出信息的参考。数据的获取以及处理是工作核心,根据成图的需求来完成航摄因子的计算,同时完成航摄路线规划,结合航摄任务执行范围内的地理地形因素特点,消除地形因素对图像质量重叠度精度的影响。矫正畸变差为关键处理点,通过空三加密预处理来保证影像质量。
2 无人机大比例尺地图测绘
2.1 大比例成图流程和技术路线
首先利用无人机航摄系统完成航空摄影经过片控制点的测量以及空三加密建立完善系统模型,进而在完成图像采集的过程中通过数字立体模型的建立完成立体采集,并通过系统获取的点云数据完成手工精细分类以提取高程点。(图1)
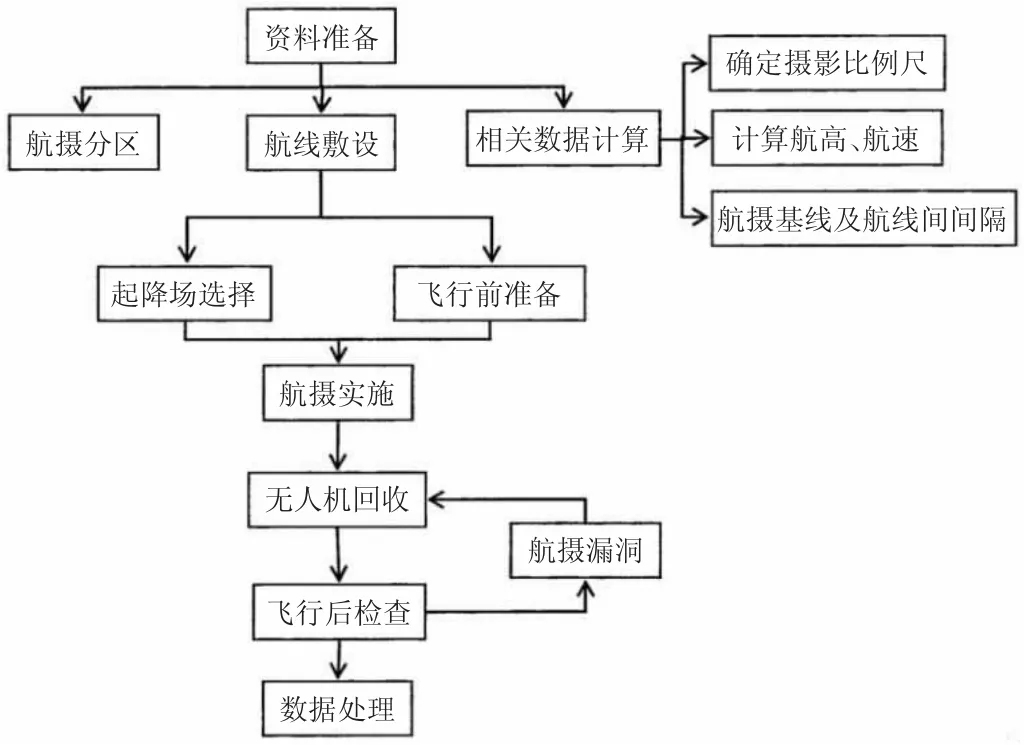
图1 无人机图像获取流程
2.2 航飞准备与飞行作业
2.2.1 航摄比例尺确定


表2 航摄比例尺确定
2.2.2 航高确定
式中:H为航高;m为CCD像元尺寸;M为像元尺寸对应地面的长度。
2.2.3 航速确定
式中:w无人机重量;s机翼面积;ρ空气密度;c无人机升力系数。
2.3 影像预处理
无人机在航摄过程当中搭载的是非测量数码相机来完成拍摄任务,对测量精度会产生较大的影响,必须要经过畸变纠正以及影像匹配等预处理才能够保证空三测量后续处理工作的顺利进行。预处理的手段不仅包括纹理增强以及畸变纠正,同时也包括像片色调的处理。人工神经网络分类法的主要思想是通过将遥感图像体现出的明显特征作为输入信号,按照相应的规则进行训练,在输出端完成对输入信号的分类。BP网络神经分类属于人工神经网络分类的一种,不但具备良好的容错特征,同时能够实现高精度的分类。
2.4 空三加密
空三测量根本原理在于减少野外控制点,通过密集数据模型的使用,以最小二乘法原理来保证坐标以及高层的解析,利用已知点来完成外方位元素影像的求解。当计算范围完成由单像片扩张到一条航带或者是立体双像扩张到多条航带时,空三解算也被称之为空三加密。空中三角测量方法按照相应的数学模型有航带法、独立模型以及光速法三种。处理流程较为繁琐,需要通过校验文件的导入来完成航带的划分,利用金字塔处理完成航摄影像的处理(三种平差方法见表3)。

表3 空三加密平差方法比较
3 无人机航摄成图影响因素以及优化
3.1 成图精度误差分析
像片倾角影响的主要元素在于无人机飞行状态时不稳定性因素导致,该过程中最主要的影响因素在于平面像点的位移以及地形的起伏高程差。其中,平面影响主要是气流的影响,因为在气流的作用之下无人机航摄飞行过程当中难以保证完全置平,而在这样的过程当中,会导致点构像存在相应的误差。另外,在无人机完成航摄工作任务的过程当中,倾斜像片同理想像片之间无法产生相应的横坐标,此时的投影差也会产生相应的影响。
式中:δ为像点位移量;γ为向径长,该长度以等角点为起点,以目标成像点为终点;φ为向径与影像等比线的夹角;α为像片倾角。
式中:δ为像点位移量;γ为向径长,该长度以等角点为起点,以目标成像点为终点;φ为向径与影像等比线的夹角;α为像片倾角;h为地面点相对于水平面高差;H为航摄飞行高度。
3.2 精度优化方法
无人机航测任务完成过程当中,图像精度受到多重影响,其包括本身处理系统也包括软硬件的限制,而外界的天气、温度以及地形等不可控的影响也较为明显。外界因素难以改变,所以想要实现精度的提升,必须从内部下手。首先,要规范操作流程,其次通过软件的开发和硬件的增强来保证图像精度的提高实现高精度作业,在此过程中应严格依据《大比例尺地形图航空摄影测量数字划测图规范》控制并分析误差。
现有的影像处理软件在处理过程中对无人机航飞的原始数据存在局限,常用的pix4d软件在航飞的影像按项目处理时往往会存在因图形结构不好影像预处理通不过,三维CC软件在影像项目处理时存在空三不能通过或空三处理结果异常而不能满足建模需要。另外,无人机航测影像往往由于分辨率高,影像数据量过大,在常用的地形图成图软件CASS中使用过程不能直接插入CAD图,要保证分辨率不降的条件下加载影像,可行的办法是对影像进行裁切,将大影像裁切成若干块,然后分批插入图形中,在吃过程中需要根据实际情况选取影像,整理pos数据,因此可以通过自动挑选影像与pos数据整理,对无人机数据预处理,以满足pix4d及CC三维建模的需要,同时借助相关软件(如arcgis)批处理自动裁切影像,将大影像裁切成若干块满足影像成图的需要。
4 三维建模以及成果分析
4.1 三维模型建立方法
利用专业的软件完成建模是最为直接有效的方式,常见的三维模型软件包括CC三维建模、SketchUP、AutoCAD以及3DMax等。无人机倾斜摄影能够从五个视角完成相关图像的采集,模型建立过程中,首先要完成现有资料的分析,保证其在无人机倾斜摄影基础之上利用像片控制点测量成果并完成空中三角测量。同时在五个视角影像和空三加密成果的基础之上利用CC三维建模进行模型成果展示,根据三维模型采集大比例尺DLG。
4.2 技术要求
首先,在模型建立的过程当中要保证道路、桥梁以及水面等图像的优化。其次,由于倾斜摄影航拍视角的遮挡性很多建筑物表面影像会出现漏洞,所以在建模过程当中可以采用三维模型编辑工具来完成图像的修复。另外,在倾斜摄影过程当中由于角度的问题难以获得建筑内部纹理图像,所以三维模型当中实际结构展现的并不完整,在此过程当中需要通过单独模型的建立,在三维激光扫描的基础之上利用贴图软件完成贴图建模。最后,由于序设置的缺陷,三维建模过程中会有诸多云匹配提取错误、三维模型不平整、三维模型中存在悬浮物的缺陷,需要对其进行修正处理。
4.3 技术路线
在进行空三加密的过程中需保证在精测区分块、相对筛选点、云计算点、云购网以及白体三维模型构建。在模型的建立过程中需在漏洞修复以及元数据制作等操作技术过程当中保证数学基础正确,相关的采集精度符合实际的需求,能够在三维模型的基础之上完成三维坐标以及野外实测检测笔坐标的比较。另外,要保证整个建筑模型在建立的过程当中呈现自然状态,无作业区空洞以及不合理的悬浮面片的出现。整个建模过程当中,要保证细节的完整性,其纹理精度需满足影视向地面分辨率的需求。
4.4 成果分析
三维模型的可视化,以GIS、BIM以及物联网技术为基础,无人机航摄系统完成相关数据的收集在软件处理之下完成数据叠加,使其直接显现在虚拟场景当中。三维场景的可视化相较于传统的2D页面形象更为直观,角度更为贴切,能够满足信息查询以及规划设计等功能,同时强大的数据分析和参考能力也为计划的制定提供了极为有利的辅助。三维模型的可视化在于,将各种模型完成空间位置以及场景的组织通过图形的方式直接显示在计算机屏幕上,是人机交互的切实体现,在此过程当中可以通过漫游功能来保证精准性和实时性。
通过无人机数据预处理以及成图辅助系统的协助,在CC三维建模过程当中实现了良好的工作准备,在CAD平台以及S软件的基础之上突破了航测成图难的问题,填补了软件不足的空白,同时实现了外业问题到内业处理上的转化,有效的减轻了外业的工作量,利用实测高程点构建图形,完成了三维模型大比例尺DLG的采集工作,满足高精度成图需要。
5 综述
测绘无人机是当前测绘行业的发展主流,逐渐完成了小区域大比例尺测图的广泛覆盖。而其凭借着较低的成本投入、较高的精度预测以及较为简单的操作方式赢得了大众的信赖。在无人机航摄系统完成大比例尺成像的过程当中,精度的评定和误差分析必不可少。想要提升图像质量必须从软硬件结合入手,既要保证硬件设施的稳定性和高质量性,同时也要保证相应的软件具备良好的图像处理能力,保证比例尺成图精度。通过倾斜摄影的影像建立三维模型,然后在三维模型上采集大比例尺图形,是无人机测绘自动化、智能化、全面化、高效化的集成体现,能够更好地满足实际需求。
猜你喜欢
写真地理(2020年39期)2020-12-23
中学生数理化(高中版.高考理化)(2020年11期)2020-12-14
理论与创新(2020年15期)2020-10-09
辽宁省博物馆馆刊(2020年0期)2020-08-13
电子制作(2018年17期)2018-09-28
现代测绘(2018年3期)2018-09-13
企业科技与发展(2018年5期)2018-09-10
通信电源技术(2018年5期)2018-08-23
科学与财富(2017年19期)2017-07-19
长江工程职业技术学院学报(2017年2期)2017-06-19
