农机管理调度中心系统的设计与实现
2022-10-21 04:44刘婞韬徐岚俊李小龙张传帅孙梦遥王媛媛
农业技术与装备 2022年8期
刘婞韬,徐岚俊,李小龙,陈 华,张传帅,孙梦遥,王媛媛
(北京市农业机械试验鉴定推广站,北京 100079)
1 农机管理调度中的系统设计背景
利用大数据、云计算等手段解决农业生产数据融合应用已成为一个发展趋势。目前智慧农业还处于起步阶段,但是国家和大部分农企已经开始意识到利用信息化手段辅助农业生产的重要性[1]。通过建设农机信息化平台,依托大数据技术,建设一个统一的数据资源云平台,实现对各系统数据的汇聚融合,再通过该平台对所有系统提供数据接口服务,能够有效解决农机监管、作业统计等问题,帮助农企在农业作业过程中,降成本、增营收[2]。
针对农业作业机械现有管理模式中,数据分散、缺乏实时的农机作业信息获取、传输、反馈,以及缺少全市统一的管理调度平台等问题,开发一套高效、实用、易维护的北京市农机管理调度平台,实现对农机合作社、农机手、农机及农具等基本信息的管理,实现农机位置、农机作业轨迹等信息的传输,实现农机装备水平、农机作业水平、农机社会化水平等方面的多维分析,从而达到辅助农机服务组织调度与监管、辅助管理部门进行统计与规划的目的,形成一个与农业机械化水平相符的农机信息化管理体系。同时也将对现代农机合作社的经营管理、农业单位的决策监督起到重大的参考价值[3]。
2 国内外相关技术水平现状
目前,以美国、英国为代表的西方国家在精准农业方面应用较为广泛,很多大型农业机械均已安装远程实时监控系统,并多以农场为单位提供整套农机作业综合管理方案。美国天宝(Trimble)公司提供的 “网络农场” 系统,可更好地对农业机械进行监控与管理,包括农机远程管理系统的农机机群位置追踪、农机作业历史轨迹、地理围栏和越界报警、驾驶室虚拟仪表盘、农机机群生产效率监督、故障远程协助诊断等功能以及农业生产信息传输系统的作业、农机间数据交接、办公室至田间数据交接、农田测绘与勘测等功能。该系统能够通过无线通信模块连接整个农场的软件和硬件设备,从而使信息在室内电脑、农机车辆、各种终端之间进行传输和处理。在 “网络农场” 系统中使用了农场信息编辑浏览软件,这套管理系统基于地理信息系统(GIS)开发而成,提供了全面的农业数据解决方案,包括对农场地图的浏览与编辑、农业产品与收益的计算与管理、精准农业技术设备数据的处理及分析等[4]。
美国凯斯(Case)公司的农业机械上安装有美国天宝公司研发的 “网络农场” 系统[5]。使用该系统可以实现从手机到办公室,从农机到办公室,农机对农机之间的无线通信,形成农业物联网系统,管理人员在办公室可以对农事操作进行有效管理。美国约翰·迪尔公司推出的 “绿色之星” 系统、美国凯斯公司的 “先进农业” 系统、英国福格森公司的 “田地之星” 系统等都可对收获、播种、施肥及撒药进行测量和田间作业。
在农机智能监测装备方面,我国哈尔滨工业大学、北京农业智能装备技术研究中心等单位分别研究开发了基于北斗定位技术的农机作业监控终端和管理平台,并在东北、华北、华东等地推广应用[6]。据初步统计,截至2019年年底,全国已累计推广智能监测终端超14.5×104台(套),累计监测面积0.4×108hm2。在深松作业面积核算和质量检测等方面,一些省份已经实现了从人工方式为主向信息化方式为主的转变,节约了大量的管理成本,促进了惠农政策公开公正实施。除了深松作业,其他环节如秸秆还田作业,黑龙江、河北等省也早在2018年起开展了相关作业补贴的惠农政策。
3 系统框架设计
3.1 总体架构
结合北京市农机作业全方位监控及调度信息平台建设的总体需求和系统现状,整个系统为3个子系统组成:①NXServer,部署在浪潮云上的服务,包括流媒体服务、Web服务、管理服务;②NXClient,包括管理员使用的PC客户端,用于查看农机状态、实时视频、经营数据分析等;③NXDevice,用于安装在农机上的车载智能终端,包括主机、摄像头、显示屏以及一系列的多元传感器。
3.2 技术架构
北京市农机管理调度中心是一个农业大数据融合平台,可以不断整合新系统的数据,开发新的功能模块,定制新的数据展现视图,因此对总体架构设计提出了更高的要求。因此该系统以数据为核心,将大数据平台在逻辑架构上分为3层,分别是数据采集层、数据处理层和数据应用层。系统组织架构图见图1。
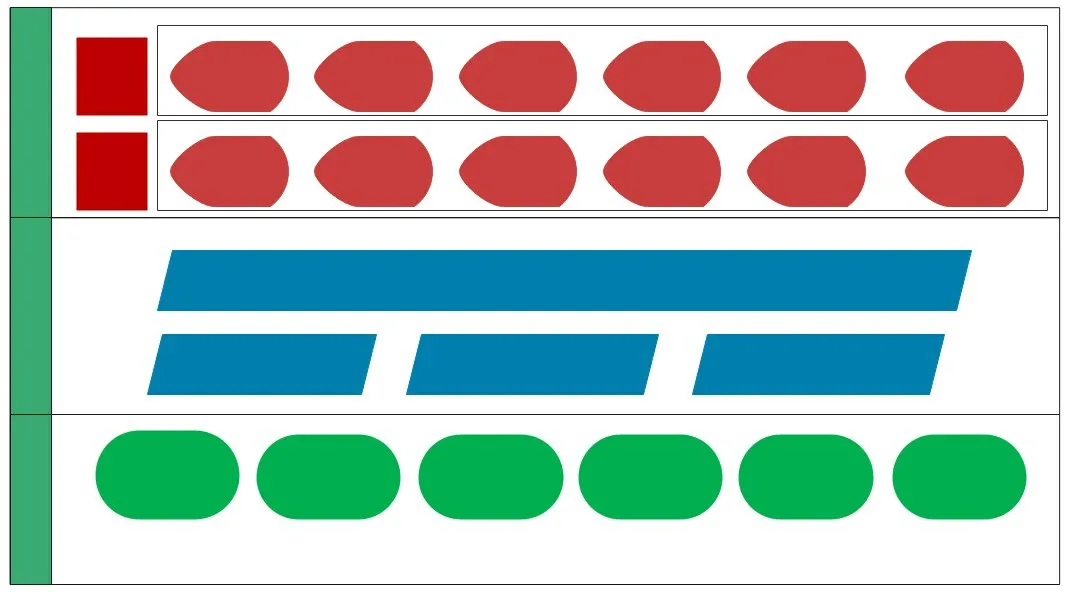
图1 系统组织架构图Fig.1 The system organization chart
3.2.1 数据采集层
整个平台通过数据采集层实现不同业务系统、不同终端数据的抓取及汇聚,形成集中统一的数据资源[7]。这些数据资源是整个平台所有功能模块运行的核心基础,因此数据采集层也是整个平台架构中的基础。融合平台通过数据采集层和不同系统进行对接,获取上层数据处理应用所需的各种数据,包括农机设备终端采集的地理轨迹数据,透传数据(油量,机车状态等),图像数据和视频数据等。
3.2.2 数据处理层
在数据汇聚到融合平台后,通过数据处理层实现对平台数据的底层处理工作,为上层功能模块提供有力的工具保障。可以说,数据处理层是整个大数据平台的核心所在,因此其技术架构的设计也尤为关键[8]。对于数据的底层处理,即需要基础的存储、计算、网络等硬件资源、也需要系统环境和软件,因此在该层根据软硬件环境和处理维度又可以划分为基础架构层(各种硬件资源)、系统平台层、数据服务层和应用服务层。通过这种技术架构实现数据在整个生命周期内的所有管理功能,并提供了完善的数据模型和开发接口,为上层应用系统的功能模块封装了必要的、完善的实现手段。
3.2.3 数据应用层
数据应用层是根据大数据平台的具体项目需求设计的具体功能模块和展现效果,利用数据处理层提供的资源和接口,对数据采集层汇聚的数据,按照不同的业务逻辑进行处理和展示,是整个数据融合平台的核心价值所在。在融合平台上利用融合汇聚的各系统数据后重新定义的新业务系统,区别于传统应用系统各自独立的设计方式,在融合平台中,将业务系统的上层展现与底层的功能模块进行分离,通过对不同应用子系统业务逻辑的深度分析和挖掘,开发出不同类型的功能子模块,便于各个业务系统根据需要选择接入点,应用之间通过服务总线进行有效交互,以适应未来业务发展的需求,实现信息、资源的共享和重用,提供数据共享及服务共享能力,从而实现整个系统在松耦合前提下的数据融合[9]。
4 系统功能设计
4.1 硬件系统构成
硬件系统主要由作业质量监测系统构成,该系统基于地理空间遥感技术、多元传感器融合技术、断点续传技术等,对农机的播种、植保、收获、深松整地、秸秆还田作业等作业质量、面积,以及对农机油耗、工况等进行监测的技术。
作业质量监测系统是实现监测的软硬件集合体,见图2,由安装在农机上的数据采集装置以及后台计算平台构成。数据采集装置作为农机作业探测设备,由定位天线、显示屏、机具识别传感器、摄像头、多元传感器等组成,安装在拖拉机以及农机具上,根据不同环节的作业监测需要进行配置,实现农机定位、农机作业面积实时统计和作业质量实时掌控。

图2 农机作业质量监测流程示意图Fig.2 The schematic diagram of agricultural machinery operatio quality monitoring process
针对 “一机多具” 复合监测的应用需求,通过农机智能监测终端(GPCS),集成不同类型农机具的智能监测技术,实现了一个终端可配套和自动识别多种农机具的即插即用功能。设备构成见图3,主要由主机终端、定位天线、姿态传感器、机具识别传感器、摄像头等构成。在原理实现上,通过传感器采集农机作业相关状态信息,ARM主控制器进行计算分析,并将采集的农具信息、定位信息通过无线数据传输系统传输到远程平台端。其技术应用场景包含旋耕作业、深松作业、深翻作业、播种作业、插秧作业、植保作业、收获作业、秸秆打包作业,以及油耗管理。针对不同作业,有不同的监测技术。

图3 设备构成图Fig.3 The equipment composition
4.2 软件系统功能构成
北京市农机管理调度中心是在大农机、大农业、 “互联网+农机” 的时代背景下,以数字化农机管理、数字化农业管理为目标的大数据农机展示平台,服务于市、区、农机合作社及农户等各级农机管理相关主体。通过安装在农机上的智能无线终端(GPCS)及作业监测设备终端实现与农机管理调度中心数字化平台的对接。将定点定位、作业轨迹、图像获取、作业量计算、作业质量监测、农机管理等功能紧密结合,构建农机社会化服务、农机装备综合信息管理、合作社综合信息管理、农机精准作业监测、农机综合调度指挥等多元一体化大数据云平台,实现农机分级指挥及远程调度、农机各类型作业信息监测及数据统计分析、农机合作社综合信息管理等功能,对全市农机的宏观管理、指挥调度、作业统计、发展决策及农机合作社的社会化服务管理起到支撑作用。系统组织结构,见图4。
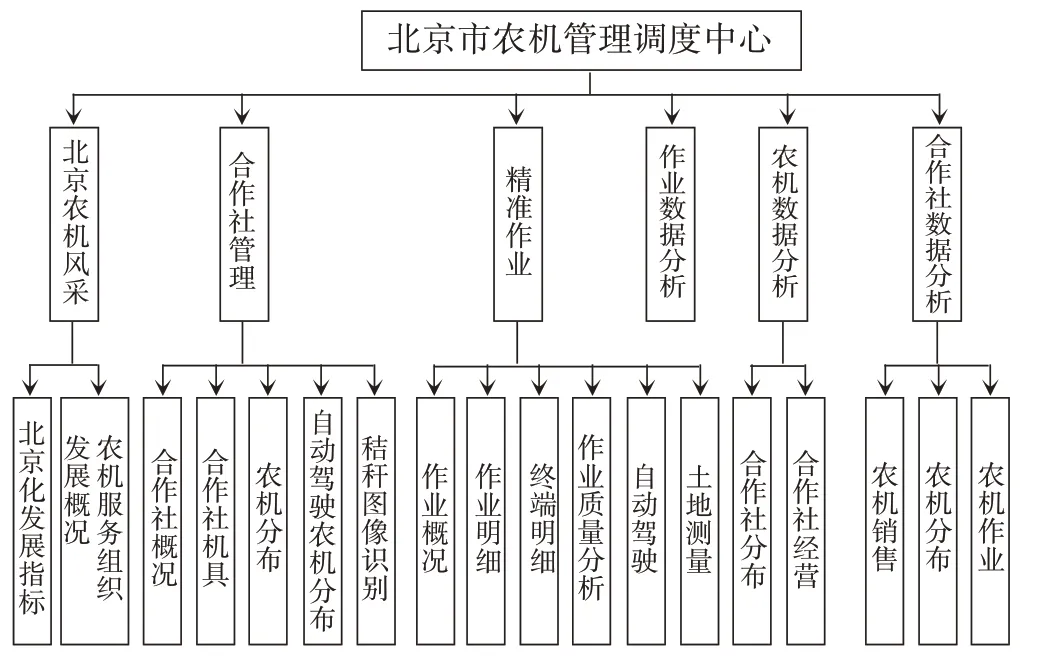
图4 北京市农机管理调度中心系统组织结构图Fig.4 system organization chart of Beijing City Agricultural Machinery Management and Dispatching Center
5 系统功能实现
5.1 农机作业概况
农机作业概况显示登录地区所辖的各地区三种作业类型的作业面积对比、三种作业类型作业面积占比、各地区三种作业类型已作业和设定面积对比,以及当前月3种作业类型每天的作业面积走势信息。
5.2 北京农机风采展示
从农机总动力、单位面积动力、玉米耕种收机械化水平、秸秆综合利用率4个方面展示近两年北京市与全国对比数据;从拖拉机、拖拉机配套机具、大田种植业、设施农业、农产品初加工、畜牧养殖、渔业等方面展示北京市各区农机装备保有量及近几年保有量走势;从主要农作物耕种收、设施农业、畜牧、水产、林果、农产品初加工方面展示北京市各产业农机化水平。
5.3 精准作业质量分析
通过质量分析可进入地图页面查看车辆信息、作业详情及作业轨迹。支持关键字、作业类型、设备号、日期、地区查询,右侧以列表展示查询结果,包括单位、设备、作业类型、作业面积、达标面积、重复面积、合格面积及日期。
地图上支持显示测量点、图像点、轨迹、地块、速度、轨迹回放、测量轨迹(面积测量、距离测量、全部清除)、时段分析等功能。
6 系统推广应用
系统建设并应用以来,已采集全市146家农机服务组织相关信息,在全市共安装各类监测终端320台(套)。目前已开通包括市级、区级、合作社级三级账号48个,包含市级管理账号2个,区级账号7个,合作社级账号39个。达到辅助农机服务组织调度与监管、辅助管理部门进行统计与规划的目的,形成一个与农业机械化水平相符的农机信息化管理体系。
各农机服务组织的基本信息、农机具信息、机手及相关照片均已导入系统中,农机服务主体可实现线上管理。各区作业主体基本按照要求安装了监测终端并上传作业数据,涵盖农机耕整地、播种、植保、收获、秸秆处理等多环节,监测功能涵盖深度监测、播种堵塞、植保流量监测、留茬高度监测、油耗监测、面积测算等。经线上监测统计,2019年完成线上监测合格面积1 930×104m2,2020年完成线上监测合格面积7 800×104m2。通过应用农机作业质量监测技术作业监测精准可靠,提升了作业监管水平,为绩效管理提供支撑。
7 系统试验分析
为了验证关键环节农机作业质量监测应用效果,分别针对植保、收获环节作业面积准确率进行了试验。
7.1 植保作业
作业面积测量精度的测试采用普通测量的方法进行测试,获得实际作业面积,植保环节系统统计面积,实际测量面积与系统监测面积对比。试验结果见表1。
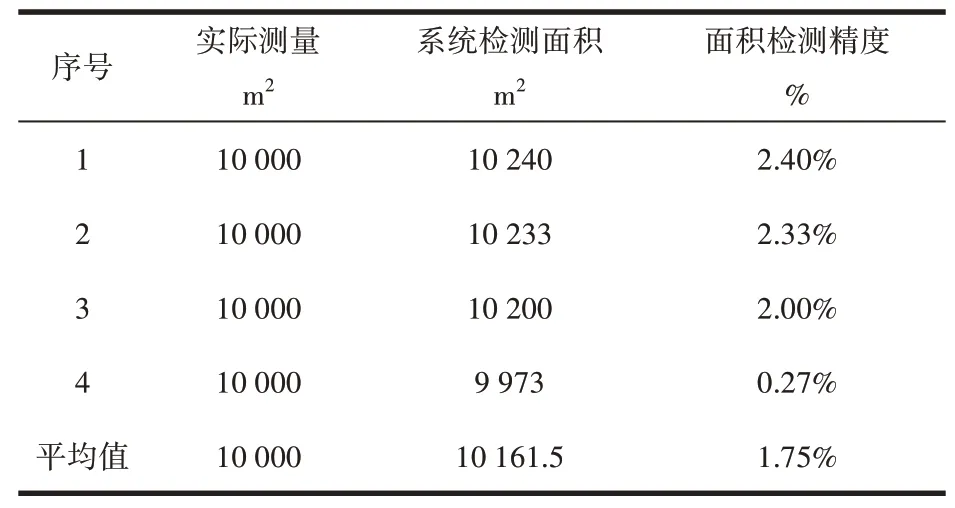
表1 测量试验结果Tab.1 The measurement test results
试验结果表明:植保环节作业面积监测精度约1.75%,误差范围在5%以内,精度较高,可以作为实际面积参考数值。
7.2 收获作业
试验方法同上,试验结果见表2。
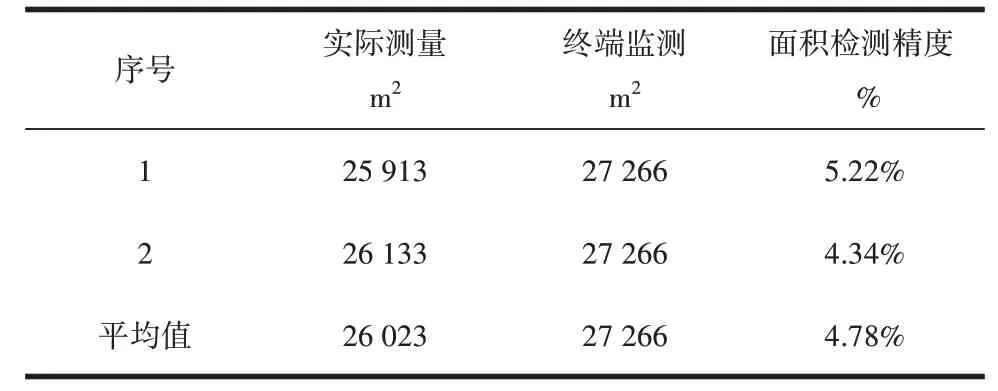
表2 收获试验结果Tab.2 The harvest test results
试验结果表明,收获环节作业面积精度平均为4.78%,面积监测精度可以达到实际应用需求。
8 结语
(1)建设北京市农机管理调度中心。结合北京市农机管理的全面工作,建成了北京市农机作业管理平台。该平台是以数字化农机管理、数字化农业管理为目标的农机大数据展示平台,服务于市、区、农机合作社及农户等各级农机管理相关主体。实现农机分级指挥及远程调度、农机各类型作业信息监测及数据统计分析、农机合作社综合信息管理等功能,对全市农机的宏观管理、指挥调度、作业统计、发展决策及农机合作社的社会化服务管理起到支撑作用。
(2)依托北京市农机管理调度中心可实现合作社全面信息化管理,依据该系统,解决合作社管理中农机具管理、人员管理、调度管理、农机作业质量管理等问题。通过海量数据的持续积累和人工智能技术应用,使线下生产与合作社作业管理相互融合、相互促进,实现农业生产从标准化到精准化再到数字化的智能发展[10]。
(3)有效建设数据资源云平台。通过在全市范围内收集农机合作社、农机基本信息,并安装统一的农机监测终端收集农机作业数据,使各类农机数据资源整合,构建农机数据资源云平台,为大数据分析奠定数据基础。
猜你喜欢
今日农业(2022年2期)2022-11-16
今日农业(2022年14期)2022-09-15
计算机与数字工程(2022年7期)2022-08-26
今日农业(2022年1期)2022-06-01
南方农业·下旬(2022年4期)2022-05-24
科学与财富(2021年35期)2021-05-10
小天使·一年级语数英综合(2018年4期)2018-06-22
商情(2012年48期)2017-11-08
考试周刊(2016年93期)2016-12-12
考试周刊(2016年65期)2016-09-22