基于多重变量控制策略与模糊PID的AGV农业小车设计与实现
2022-10-21 04:44张瑞森万兴鸿
农业技术与装备 2022年8期
张瑞森,万兴鸿,高 昕
(成都工业学院,四川 成都 611730)
移动机器人控制技术[1]在近几年发展迅速,不断渗入到电力、能源、运输、工业、农业等多个行业。但是,传统的工业物流机器人模式的缺陷日益增多,这对农业物流方向上的拓展应用形成了阻碍。为了将导航小车更好地应用到农业物流领域,所以就有了本次设计中的AGV小车综合系统的研究、设计与实现。
AGV型小车[2-5]是一种可以沿着设置路线行驶的自动导向设备,为了方便实时现场调度,所感知到的信息通常会向计算机传递。
在农业大棚的应用场景中,AGV小车用于大棚环境里的对植物的监测和物料运输。目前市面常见的AGV小车通常只能实现简单地前后移动与固定轨道上的转弯,很难满足复杂的农业大棚环境,且系统不容易低成本重用。
为了解决传统AGV小车在大棚环境里应用时四向移动能力不能满足需求的问题,设计了基于麦克拉姆轮的新型AGV运动小车,小车采用麦克拉姆轮,麦克纳姆轮具有更强的灵活性,可以实现多方向移动。系统采取多重控制、混合决策的方式,使其更方便、更立体、更精准地判断方位和自动化作业。
1 系统优势
本文结合新的农业应用场景下的自动化物流的全新需求,设计了基于麦克纳姆轮的AGV农业物流小车,该系统运用的多重控制、混合决策的技术,不仅能用于农业物流,还有拓展到其他关联领域的潜力与可能。经比较分析,本次设计的新型小车具有如下的优势:①小车通过麦轮全驱联动技术,可以完成任意方向的前进、后退、斜行、本地自由全角度旋转等运动形态;②小车通过多变量输入变量控制,控制时会结合红外、超声波、无线通信技术等立刻捕获的当前运动状态监测来进行调整;③小车具备多模感知的能力,并且小车是一个闭环系统,可以对偏差进行反馈并及时弥补,支持app的远程控制方式;④小车的感知系统可轻松辨识障碍物、规划路径等,它由超声波、红外线和监控模块构成。
2 系统总体设计
系统从上往下分为采集感知层、网络传输层、中间接口层和端侧应用层4部分,且每一层涉及的设备、模块或作用见图1。
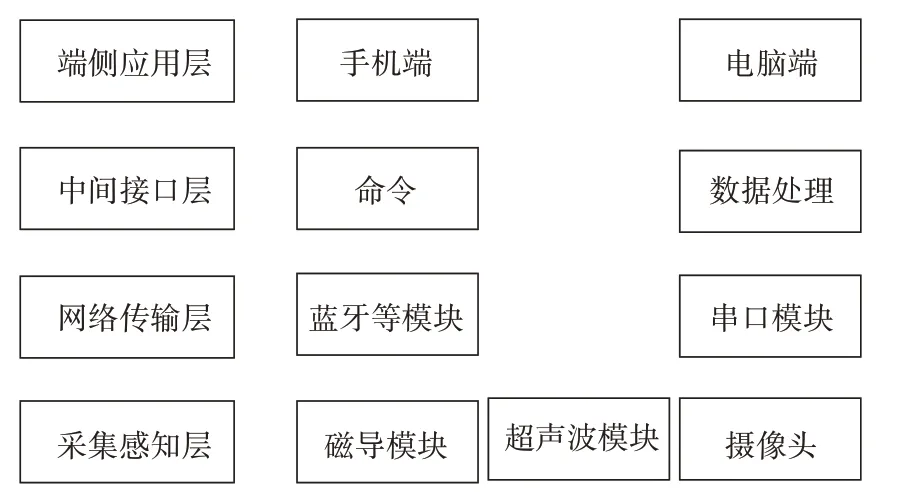
图1 系统总体构架Fig.1 The overall system architecture
系统以STM32F103C8T6高性能芯片为控制核心,搭载蓝牙模块等用于实现人机之间的无接触交互,自由完成小车的自动循迹和避障功能时,控制指令下发和运动、反馈信息获取十分方便。
3 硬件总体设计
基于图1所示的系统架构,最终完成的系统硬件整体设计方案见图2。从图中可以看出,小车硬件部分由主控芯片STM32F103 C8T6、超声波传感器、红外线传感器、电源模块、蓝牙模块、驱动模块构成,并且有主控芯片可通过I/O接口和SPI与各模块紧密相连。

图2 硬件总体设计图Fig.2 The overall hardware design
4 硬件详细设计
小车整体由主芯片STM32F103C8T6、红外传感器、测距传感器等模块组成,除此以外,还包括有电机电路,信号模块,电源模块,WIFI模块,蓝牙板块,2个驱动芯片TB6612FNG,麦克纳姆轮。要模块的详细设计的结果如下。
4.1 主芯片STM32F103C8T6
主芯片原理图见图3。从图3中可以看出,主芯片选择了32位微控处理器STM32F103C8T6,工作温度为工业级温度,可以满足实际需要,且该款芯片价格低,节省了系统成本,同时也满足较强的温度适应性。并且,系统内置高速存储器,内含晶振器可以为系统提供基本的时钟信号,外接电机控制PWM,红外线传感器等多个传感器。并且拥有多个IO扩展口,方便使用时扩展。
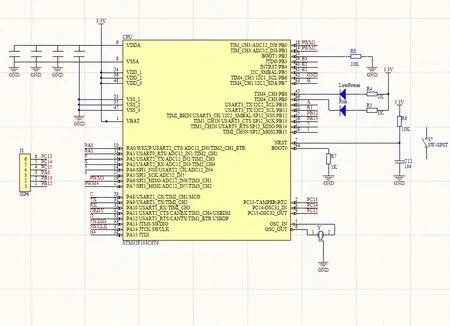
图3 主芯片原理图Fig.3 The schematic diagram of main chip
4.2 驱动芯片TB6612FNG
驱动芯片原理图见图4。驱动芯片采用的双通道电路输出的直流电机驱动装置,由东芝半导体公司提供,可以同时驱动2台电机。使用两块驱动芯片就可以满足同时驱动4个电机。此外,每通道的最高输出1.2 A电流,电机驱动电压为4.5~15 V。因为芯片的工作温度为-20℃~85℃,适应温度能力强,在工作中无需外加散热装置。并且芯片负载能力较强。
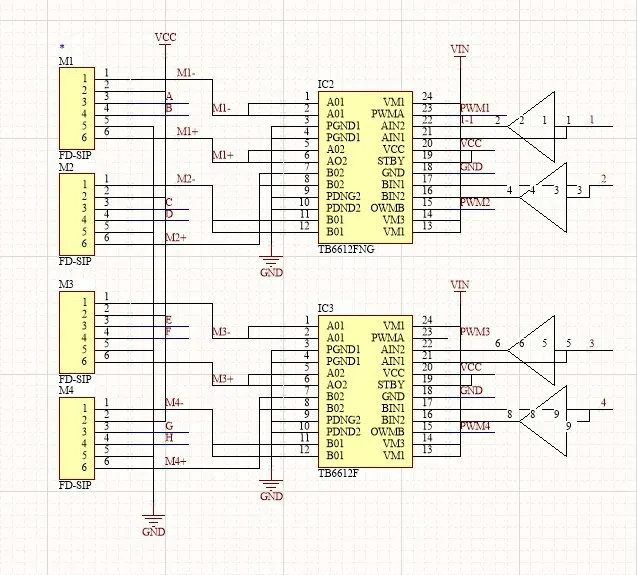
图4 驱动芯片原理图Fig.4 The schematic diagram of driver chip
4.3 蓝牙模块
蓝牙模块可以与手机能智能终端互动,同时能将互动的信息进一步使用通用同步/异步串行接受/发送器交流给主控芯片。如图5所示,设计了蓝牙模块接口。这一部分的工作原理是:通过蓝牙接收到信号并且将接收到的信号传给系统和用户,用户和系统可以根据返回来的信息对小车的实时环境进行分析从而做出相应的改变和处理。

图5 蓝牙模块原理图Fig.5 The schematic diagram of Bluetooth module
5 多变量控制策略及相关软件算法设计
基于麦克纳姆轮全向控制与多模态感知技术的AGV农业小车的控制策略和软件设计主要分为:多变量输入控制策略;模糊PID控制算法;感知与避障算法;小车app辅助控制小车软件。
5.1 变量输入控制策略
多变量输入控制,见图6,所谓的多输入就是采集多种传感信息综合应用起来,为协同控制小车运动提供丰富的可利用的环境模型,这些环境信息采集时使用模块和数据传送方式如下:①通过红外传感器输出的高低电平和检测红外线的有无,检测小车的前进路线。②超声波模块主要实现小车的避障作用,与红外线传感器协同合作,高效率的完成小车避障功能。③摄像头模块主要完成对小车周围环境信息的采集,判断小车的运动状态,完成实时的控制。④数据传输通过蓝牙连接,数据传输给用户可以通过app控制。
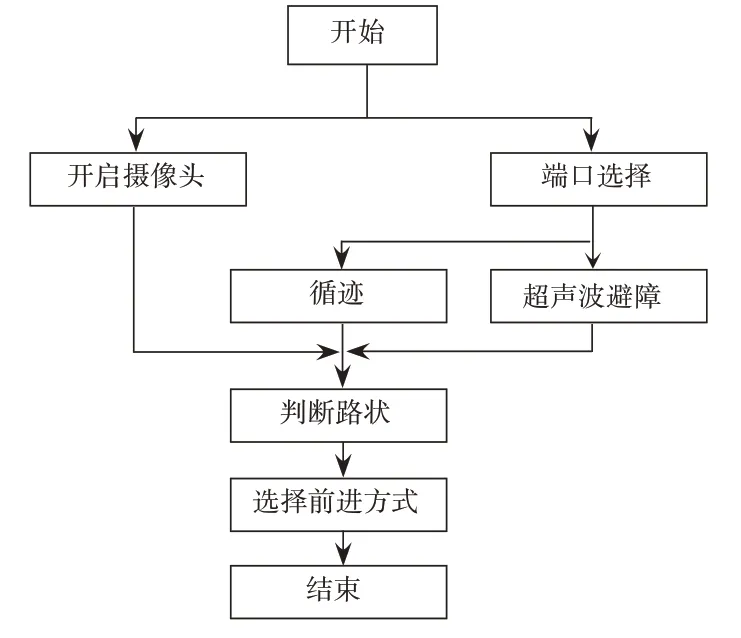
图6 多变量输入控制Fig.6 The multivariable input control
5.2 软件算法分析与实现
5.2.1 模糊PID控制算法
采用PID算法完成小车的寻迹部分,PID控制方法是控制技术中一项较为重要的控制算法,已经运用到了生活中的各个地方。PID算法简单,适用范围广,P:Proportion(比例),输入偏差乘以常数。I:Integral(积分),对输入偏差进行积分运算。D:Derivative(微分),对输入偏差进行微分运算。

式中:Kp——比例系数;TI——积分时间常数;TD——微分时间常数。
由于小车在运动过程中路线多样以及情况多样,采用传统的PID控制固定控制器参数既不符合实际也不可靠。因此实际实现时,创新地采用模糊PID算法,同时重设计了它的具体参数。现将其算法实施和验证过程详述如下。
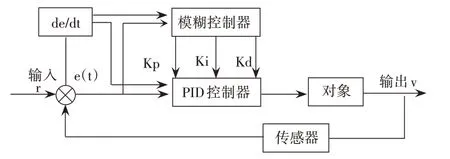
图7 模糊PIDFig.7 The fuzzy PID
(1)量化:首先是量化,设定小车的偏移E为-100~100,并将其映射到-6~6,-100就对应-6,而100对应6,量化后E的范围变成了-6~6,再定义一个当前偏差值与最近一次偏差值的变动值EC。
(2)模糊化:量化完后要对其偏移进行模糊化,这首先确定模糊子集:负大[NB]、负中[NM]、负小[NS]、零[ZO]、正小[PS]、正中[PM]、正大[PB],NB对应-6,NM对应-4,PB对应-6;然后利用三角隶属度函数求出E和EC的隶属值,完成这些工作以后进入下一步。
(3)建立模糊PID规则库,Kp值的选取决定于系统的稳定性和精度要求,对应Kp来说需要让它的值先大再小最后适当大,调节过程中应注意不要让系统不稳定;比例调节调整好之后,再利用积分控制消除系统的稳态误差,对于Ki的值变化的趋势是需要让其由小到大变化直到达到满意的误差控制效果;最后,对于Kd需要让它的值适当小一些,一般用于通过调节以补偿相位。
(4)最后一步就是进行解模糊和清晰化的过程。根据建立的规则表和隶属值将其清晰化。以建立模糊控制器参数值KP的清晰化结果为例,其值将由图8的计算图来确定。
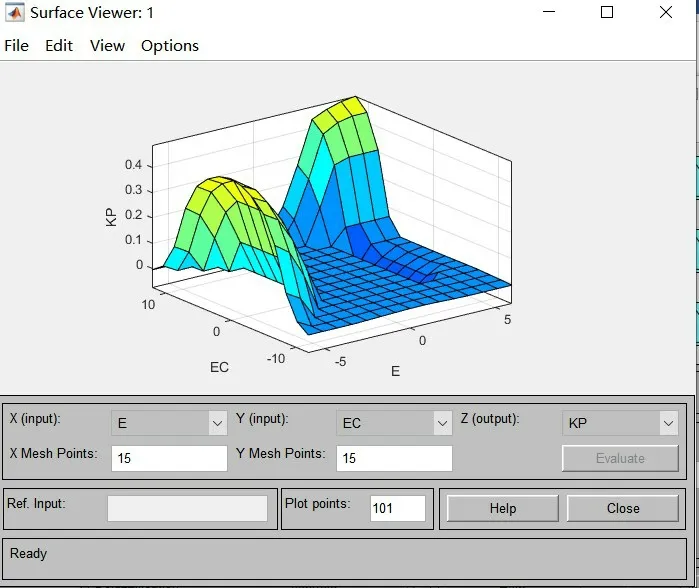
图8 模糊控制器参数计算图Fig.8 The parameter calculation diagram of fuzzy controller
5.2.2 感知与避障算法
进一步地,系统还通过红外线传感器,发射红外线,当红外线遇到障碍物时被反弹回传感器,机器做出相关反应完成避障或者其他行动。同时,在空气中超声波的速度已知,我们只需要测到超声波从发射开始到重新接收到信号的时间我们就可以知道距离的长度,完成测距。公式为:
式中:v——超声波在空气中的速度,t——测得的时间。
5.2.3 小车app辅助控制小车实现
根据实地情况,小车可以自动运行。但同时,该系统也支持通过小车app对小车进行实时控制,即小车app通过蓝牙与小车进行连接,通过灵活的操控实现更复杂的运动,并且把这些自定义的运动记录下来,可供后续自动控制做参考。设计完成的小车app控制主界面,见图9。

图9 小车APP控制主界面Fig.9 The main interface of trolley app control
6 结语
本文设计了一种基于STM32芯片为主控芯片的农业物流小车,将多传感器协同、多模态信息利用与模糊PID控制结合在一起,当采用麦克纳姆轮的AGV小车机械结构时,多种传感器协同工作可以提高其工作的稳定性,使期可以运用于更加复杂的环境。采用模糊PID算法进行寻迹并通过仿真验证其正确性。最后,对小车进行实地的操控,麦克纳姆轮可以使小车完成多方位的转动,效果达到预期。
猜你喜欢
阅读(低年级)(2022年6期)2022-06-17
医学概论(2022年3期)2022-04-24
阅读(低年级)(2022年3期)2022-03-30
知识窗(2021年4期)2021-10-02
幼儿教育·父母孩子版(2019年5期)2019-10-18
文苑(2018年22期)2018-11-19
发明与创新·小学生(2018年7期)2018-08-06
新少年(2017年1期)2017-03-15
进出口经理人(2016年8期)2016-11-04
中学生数理化·高二版(2008年4期)2008-11-12